基于旋转交流电磁场的铁磁材料裂纹方向检测
2024-01-12胡严太胡鸿志代元涛耿妍婷李远强
郭 庆, 胡严太 , 胡鸿志, 代元涛, 耿妍婷, 李远强
(1.桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004;2.广西自动检测技术与仪器重点实验室,广西 桂林 541004)
随着现代工业技术的迅猛发展,铁磁材料因其良好的可塑性和结构性被广泛应用于建筑、航空航天、能源、运输等领域[1]。然而在实际生产和应用中,诸如电机、变压器、地下管道、飞机、铁轨等设备长期处于高强度、强压力的工作环境中,其中的铁磁材料可能会产生裂纹、腐蚀、缺口等缺陷[2]。因此,对铁磁性材料进行无损检测是十分有必要的。在常见的铁磁性材料的无损检测方法中,基于电磁原理的检测方法,如电磁超声技术[3]、涡流技术[4]、漏磁技术等[5],因具有特殊优势而得到国内外学者的广泛关注。其中,漏磁检测技术可以对裂纹缺陷进行有效检测,但需要将工件磁化到近饱和状态,导致其磁化机构体积较大。涡流检测技术只能给出缺陷存在,很难定量、定位检测缺陷[6]。交流电磁场检测(Alternating Current Filed Measurement,ACFM)技术是一种在涡流检测和漏磁检测基础上发展起来的新兴无损检测技术[7],相对于涡流检测与漏磁检测,ACFM技术具有速度效应影响小、检测信号受提离变化小和量化精度高等优点[8],因此被广泛应用于金属表面的裂纹检测当中。Li等[9]利用ANSYS有限元分析软件模拟了U形ACFM探头在不同提离值下裂纹上方交变磁场的信号分布与强度,确定了U形ACFM探头的最佳提离值为4 mm[9]。Wang等[10]基于并联电路的电流分流和毕奥-萨伐尔定律搭建了ACFM的解析模型,并利用有限元分析软件验证了该解析模型的正确性[10]。
然而,传统的ACFM检测技术具有方向性,仅对垂直于感应电流方向的裂纹具有较高的灵敏度,而对平行于感应电流方向的裂纹灵敏度较低,故存在出现缺陷误检、漏检的可能[11]。为此,Li等[12-13]设计了一种双U形正交ACFM探头,利用有限元分析软件验证了该探头对任意方向缺陷检测的有效性,并将其应用到了水下结构裂纹缺陷的检测中。孙长保等[14]基于ACFM技术原理,分析了横向以及纵向裂纹缺陷检测信号Bx、By特征向量的特点及其形成机理,通过信号图谱特征和信号幅值衰减规律判断出斜向及横向裂纹缺陷的大小及位置[14]。
在此基础上,本文采用旋转磁场作为交流电磁场检测的激励源,利用有限元分析软件建立探头模型,对多个采样点采集不同位置的磁场信息,分析了不同方向裂纹的磁场信号特征,获得了缺陷的磁场信号By-Bx曲线长轴倾斜角度与裂纹缺陷方向的关系,为裂纹缺陷方向检测提供依据。
1 旋转ACFM原理
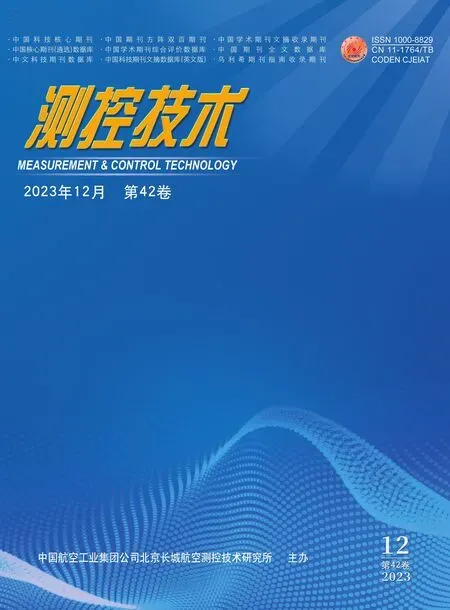
ACFM基于电磁感应原理,将通有正弦交流电的矩形线圈靠近金属工件时,由于趋肤效应,其感应电流集中于工件表面,形成匀强感应电流。如图1所示,当工件存在裂纹缺陷时,基于电流优先走向原则,感应电流会经裂纹的两端和底部绕过缺陷,使得均匀电流发生畸变,从而导致工件表面感应磁场信号发生畸变。通过检测裂纹处磁场的强弱变化,即可对缺陷进行定位、定量分析。
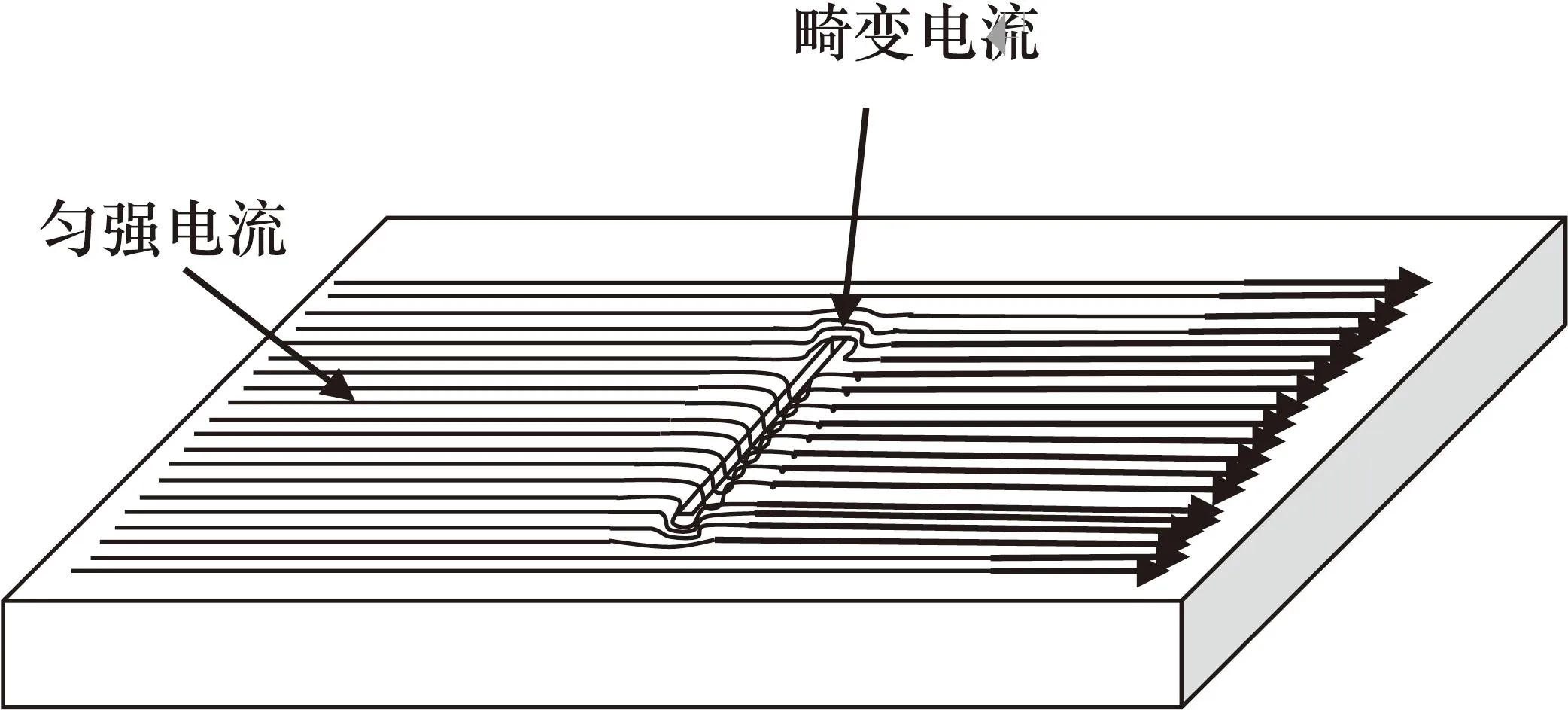
图1 ACFM原理示意图
1.1 U形ACFM探头的涡流效应
为增强被检工件的磁化强度,在线圈中加入U形磁轭,将磁感线束缚在磁轭当中,并与被检工件形成磁回路。与常规AFCM探头不同,U形ACFM探头的感应电流分为两部分:极靴附近的极靴涡流与围绕磁回路周围的磁路涡流,具体情况如图2所示。当对线圈通正弦电流时,在磁回路中的磁感线发生交变。由楞次定律可知,磁回路中的磁感应强度发生变化时,其感应涡流会产生二次磁场来阻碍这种变化,使得两个极靴附近的感应涡流在极靴中点处切线方向与围绕磁回路周围的感应涡流在极靴中点处的涡流方向相同,与磁感线的方向垂直。
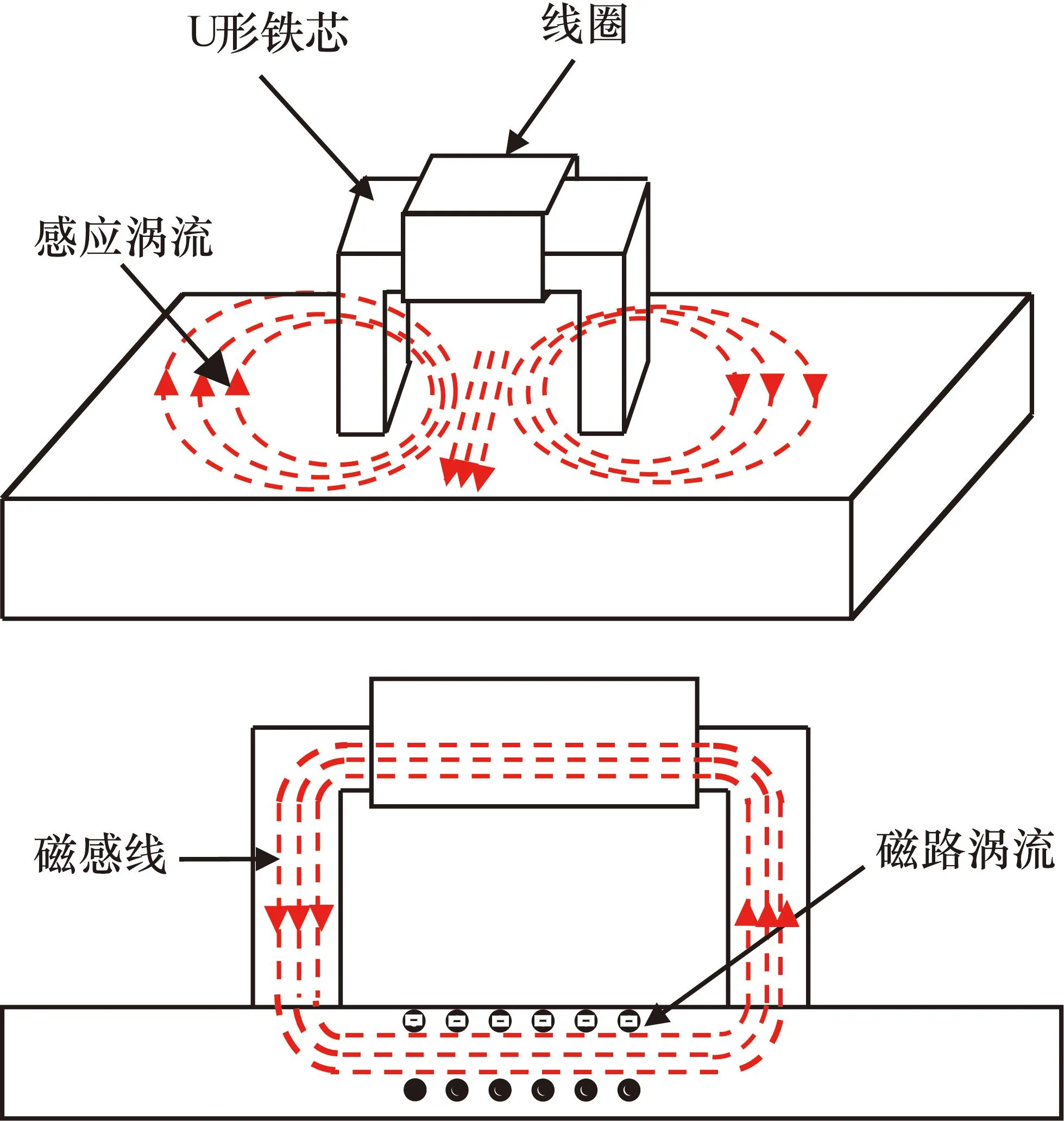
图2 U形ACFM探头的涡流效应
1.2 U形ACFM探头的漏磁效应
当使用U形ACFM探头检测铁磁性材料时,其缺陷所产生的漏磁不可忽略。由于铁磁性材料的相对磁导率远大于空气,当没有缺陷存在时,几乎所有的磁感线都被束缚在工件内部。当有缺陷存在时,基于最小磁阻原则,大部分磁感线会通过缺陷边缘绕过缺陷部位,小部分则从缺陷边界折射进入空气,在缺陷部位形成漏磁场,具体情况如图3所示。
图3 U形ACFM探头的漏磁效应
因此,使用U形ACFM探头检测铁磁材料缺陷时,其检测到的磁场信号由感生电流产生的感生磁场与磁感线泄露所形成的漏磁场共同构成。当工件没有缺陷时,其磁场信号可表示为
Bd=B背+B涡
(1)
式中:B背为检测环境存在的背景磁场;B涡为由感应涡流引发的磁场。当试件内存在缺陷时,检测传感器检测到缺陷处的信号可表示为
(2)

(3)

1.3 旋转ACFM探头引入
然而,使用U形ACFM探头对工件进行检测时,不同的裂纹方向起主导作用的原因不同。当裂纹方向与扫描方向平行时,裂纹的磁阻相对较小、电阻较大,起主导作用的为涡流所产生的感应磁场。当裂纹方向与扫描方向垂直时,裂纹的电阻相对较小、磁阻较大,起主导作用的为漏磁场。为此,在U形ACFM探头的基础上,引入三相正弦信号作为磁场激励,其结构由3个U形磁芯与三相载流线圈组成,其中线圈匝数相同、形状一致、轴线在空间中互差120°,如图4所示。
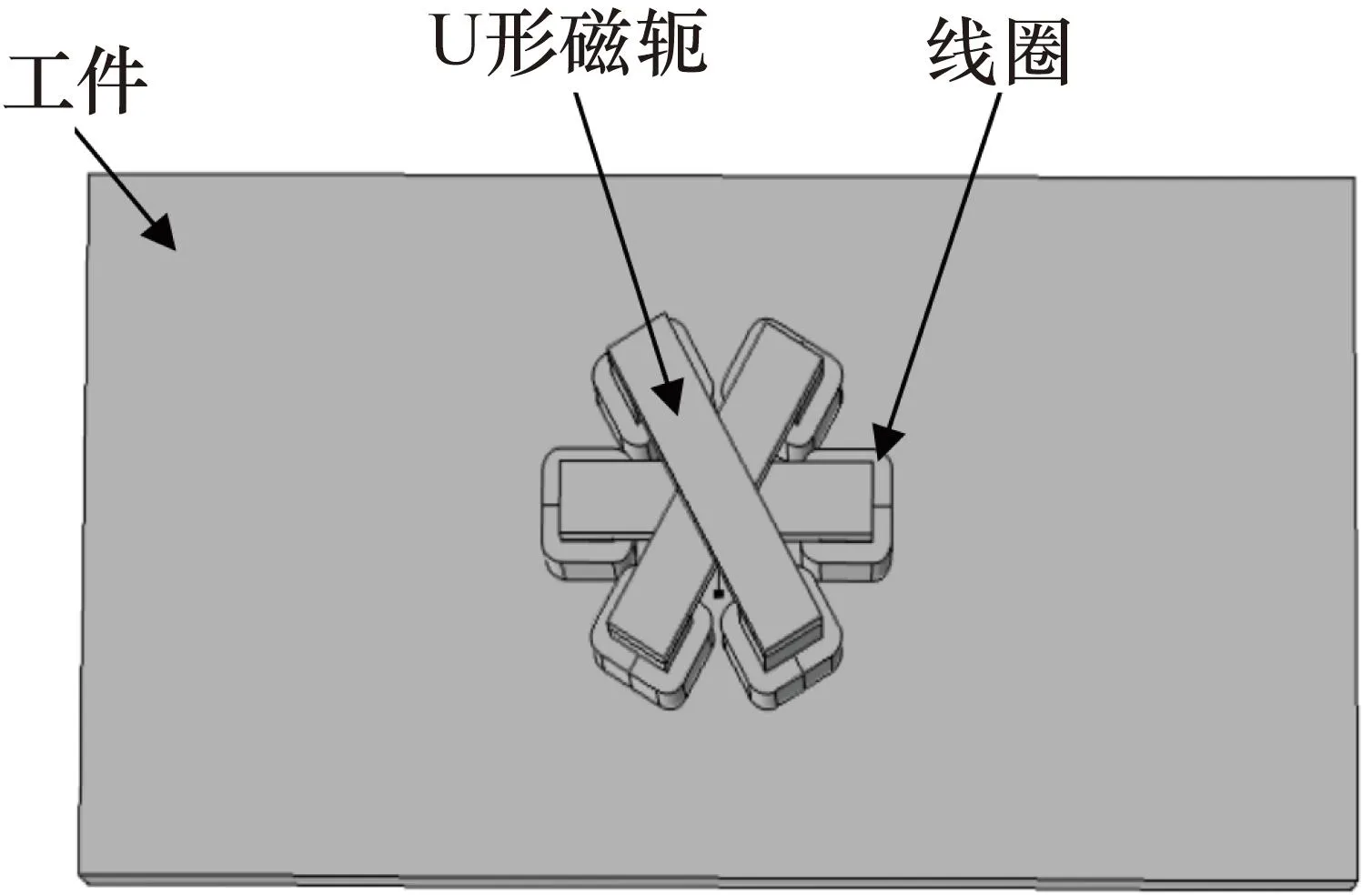
图4 旋转ACFM探头示意图
在该探头的3组线圈中分别通入如下幅值相等、频率相同、相位互差120°的正弦激励信号:
(4)
由电磁感应定律得,其线圈产生的磁感线通过铁芯聚集在一起注入工件中,在每个极靴的下方形成交变的感应涡流,将每个由极靴附近形成的感应涡流进行合成,形成一个二极旋转涡流场,其中在探头中心的正下方形成一个局部的匀强旋转涡流场,其旋转频率与正弦激励频率相同。同时在工件内部形成3个交变磁场,这3个交变磁场经过合成,形成一个二极旋转磁场,其中在探头中心的正下方形成一个局部的匀强旋转磁场,其旋转频率与正弦激励频率相同。因其磁感线绕中心点做旋转运动,导致沿旋转运动切线方向的磁感应强度增加,沿旋转运动切线反方向的磁感应强度减小。由楞次定律可知,其磁感线做旋转运动所产生的感应电流沿半径指向圆心,其感应磁场与旋转磁场方向相反。当工件没有缺陷时,其在缺陷上方检测到的磁场由工件内部的感应电流所形成。当工件有缺陷时,其匀强旋转磁场将发生畸变,在缺陷上方检测到的磁场由工件内部的感应电流与缺陷部位所泄露的漏磁场共同决定。通过分析畸变信号的特性,即可得到缺陷的相关信息。
2 旋转ACFM探头有限元仿真
由于旋转ACFM探头的解析模型较为复杂,本文采用有限元仿真软件对旋转ACFM检测探头进行建模分析,其结构如图5所示。该模型主要包括试件、星形磁芯、矩形励磁线圈和空气域4个部分。其中,线圈的高为20 mm、厚为3 mm、匝数为240匝、导线线径为0.5 mm。每相邻的两个线圈通以频率相同、幅值为0.5 A、相位相差60°的正弦电流激励。各部分材料属性如表1所示。
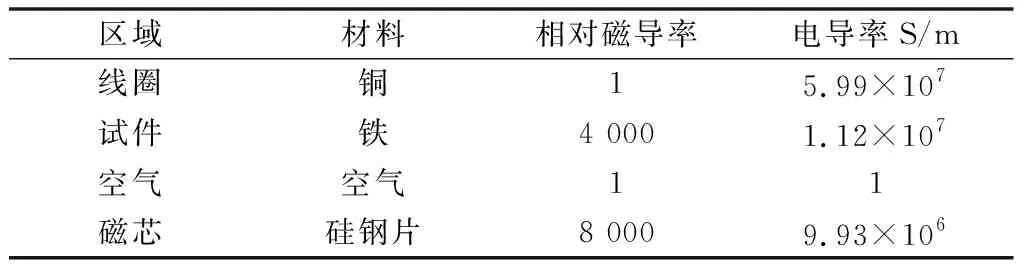
表1 各部分材料属性
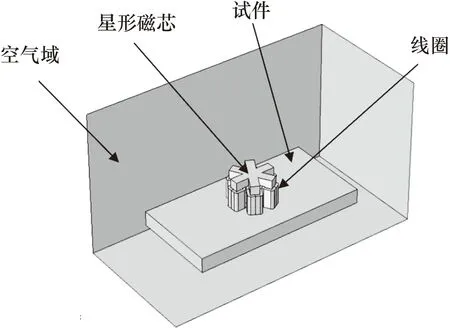
图5 旋转ACFM检测探头仿真模型
采用软件自带的细化网格功能进行网格剖分,并对探头附近重点计算区域进行二次网格细分,其仿真网格如图6所示。
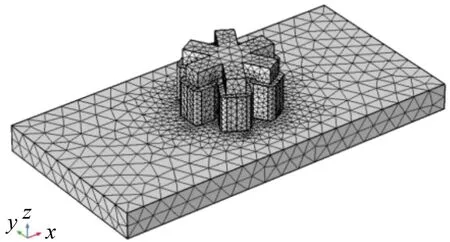
图6 网格分化图
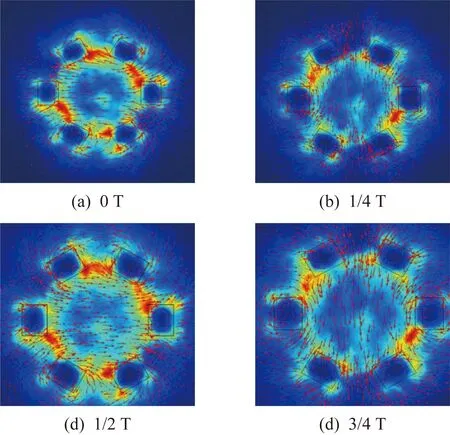
图7 一周期内的感应电流方向变化
3 仿真数据分析
目前常见的磁场检测传感器主要包括检测线圈、霍尔传感器、巨磁阻传感器和隧道磁电阻传感器。但以上传感器都只对某一方向的磁场信号敏感,为此本文通过有限元仿真采集采样点处的磁场信号,分析不同方向的磁场信号,为后期磁传感器的选择提供依据。同时,为提取更多的缺陷信息,本文采用阵列式采样点采集不同位置的磁场信号,其采样点位置如图8所示,其中提离值为1 mm。
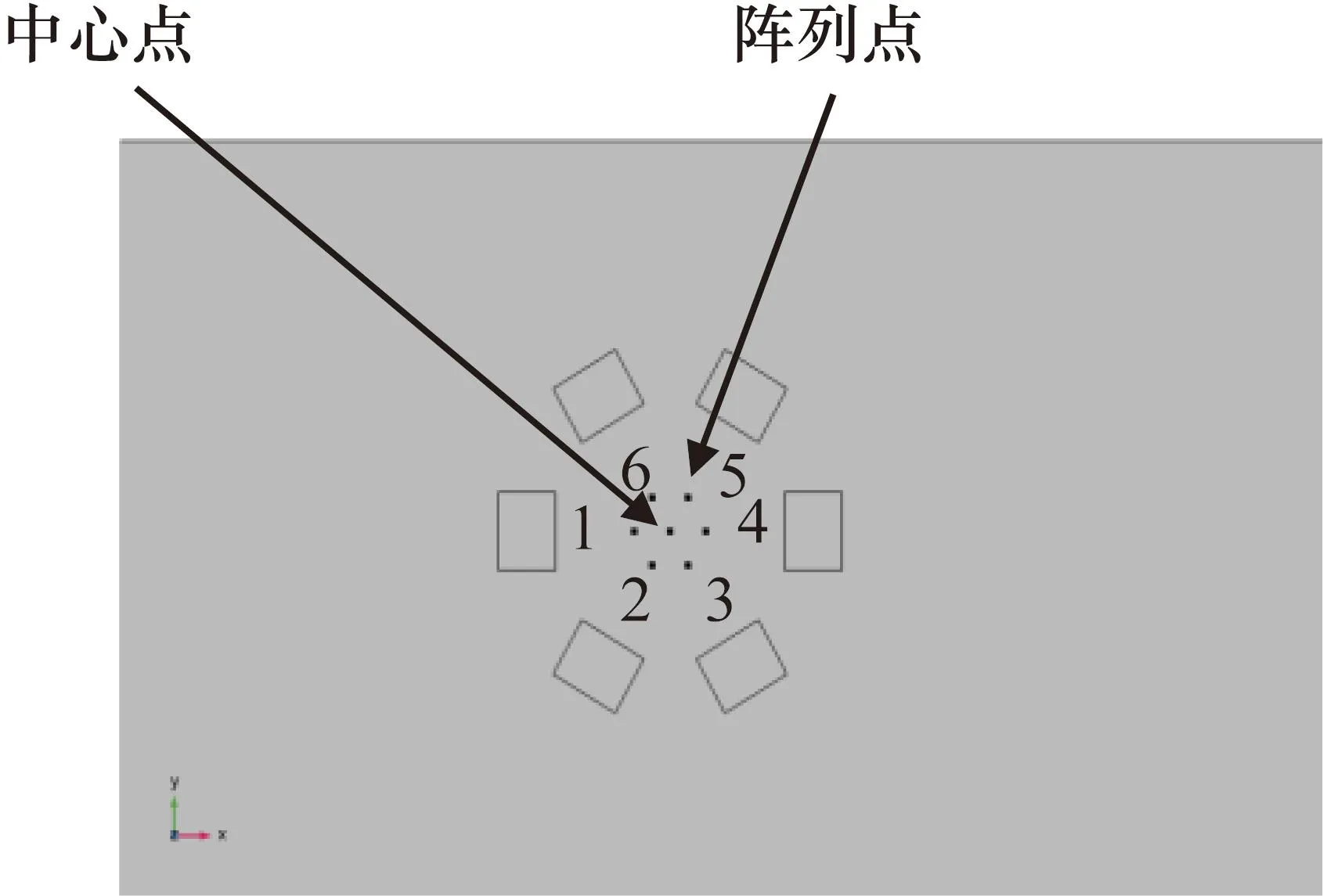
图8 阵列式采样点
3.1 中心点数据分析
由于中点处Z轴方向的磁场扰动较小,因此,选择Bx与By作为裂纹检测的磁场信号。为此,以长、宽、高分别为20 mm、0.4 mm、3 mm的长方体模拟裂纹缺陷,并采集了不同方向缺陷的磁场时序信号和均方值。当试件无缺陷时,其Bx为正弦信号,By为余弦信号,两者的均方值相等,均方值比Bxq/Byq=1。当试件有缺陷时,其Bx为正弦信号,By为余弦信号,其幅值发生不同程度的畸变,两者均方值的不同,其均方值比值Bxq/Byq与方向的关系如图9所示。由图9可知,在0°~90°内,Bxq/Byq的值随着角度的增大而增大,在90°~180°中,Bxq/Byq的值随着角度的增大而减小。
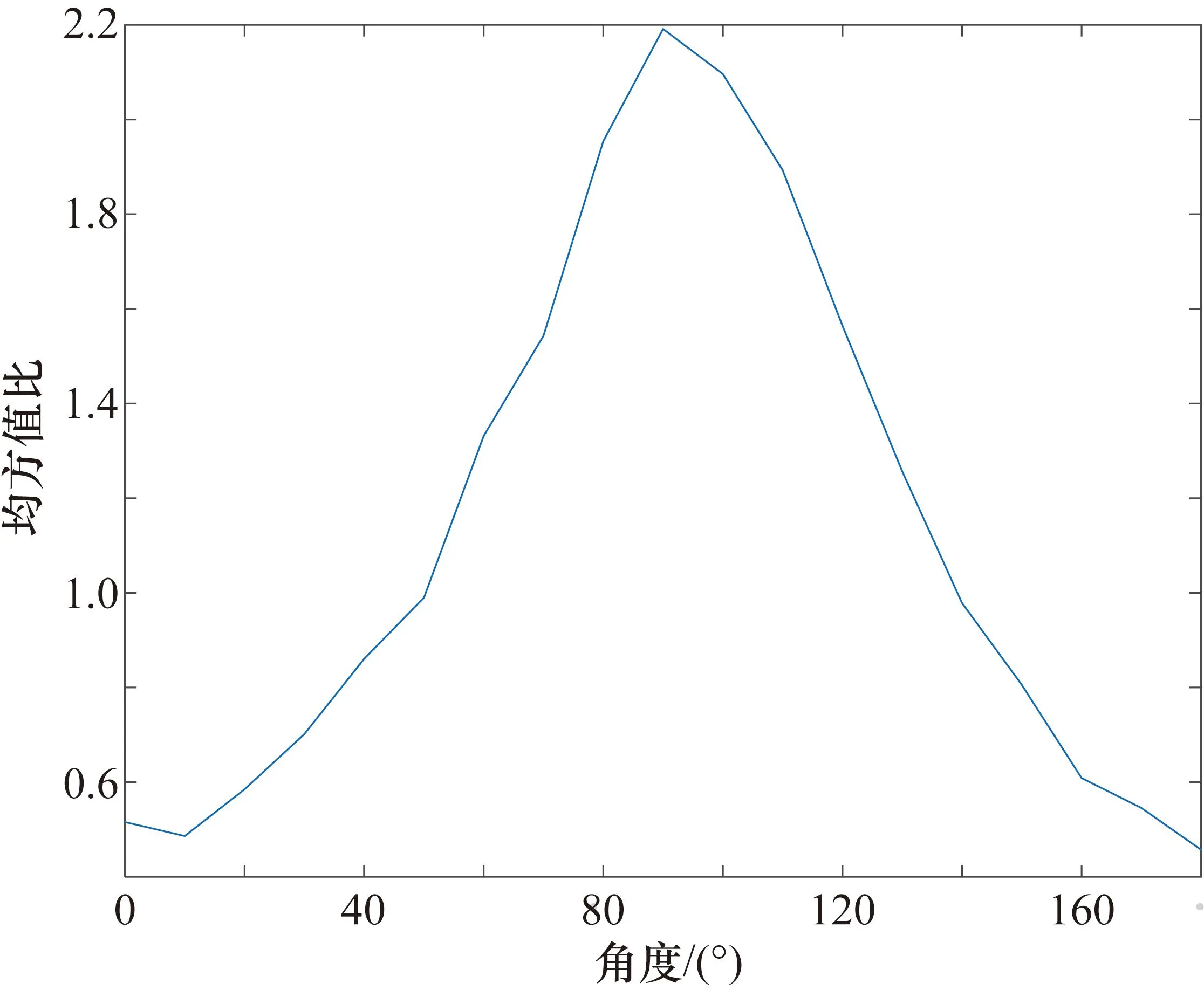
图9 单点采样不同角度缺陷Bx与By均方值比曲线
对于时序信号,令磁场信号Bx为横坐标,By为纵坐标作图,得在中心点处不同方向的By-Bx曲线如图10所示。
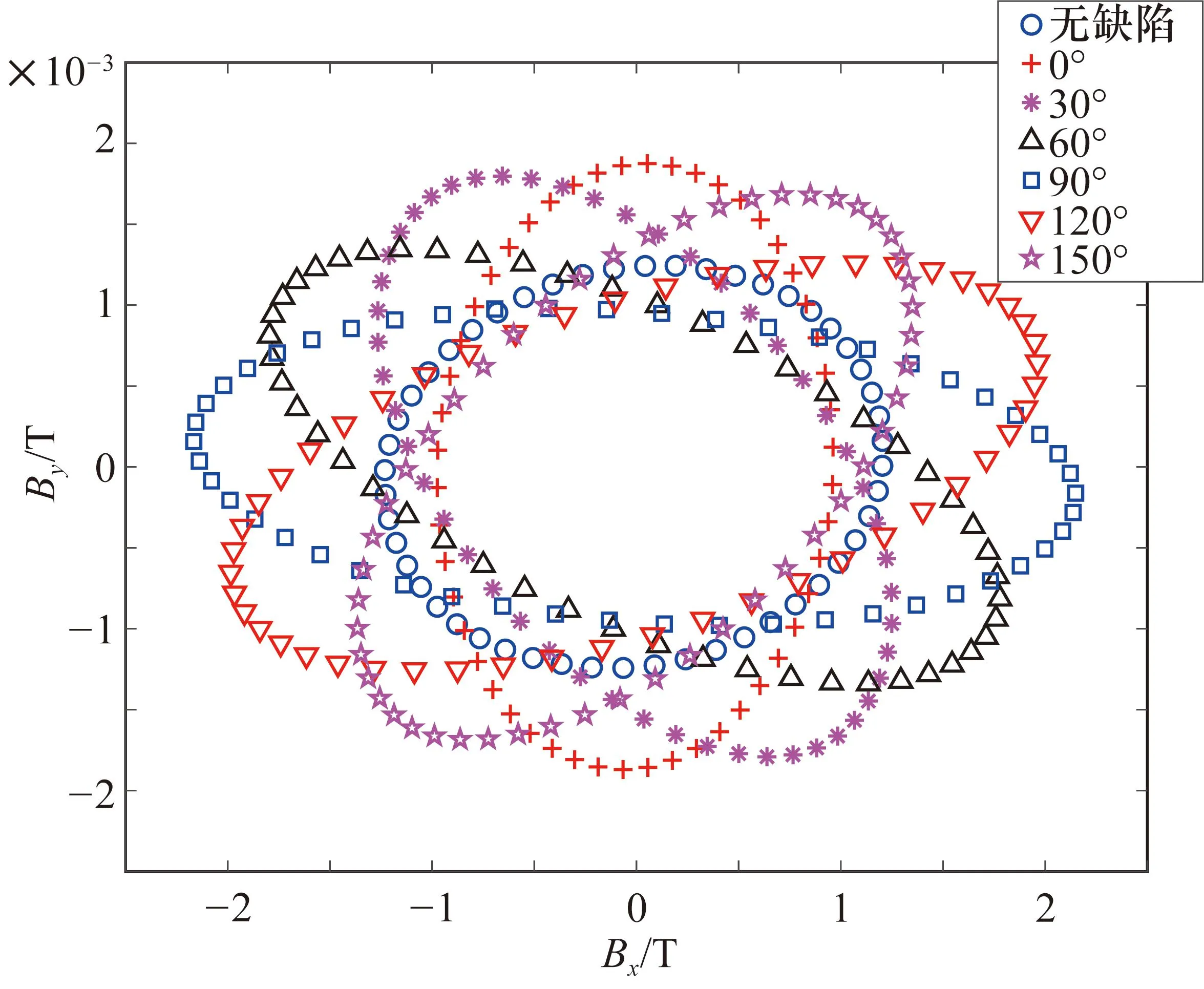
图10 单点采样不同角度的By-Bx特性曲线
由图10可得,当无缺陷时,其By-Bx曲线近似为圆形;当有缺陷时,其By-Bx曲线为椭圆形,同时椭圆的长轴倾斜角度随着裂纹方向的增大而增大。为此,设椭圆的一般方程为
X2+AXY+BY2+CX+DY+E=0
(5)
令多个测量点为Pi(xi,yi),根据最小二乘原理,所要求的目标函数可设为
(6)
为使F最小,分别对F的各项系数求偏导,令其为0,即:
(7)
得到方程组如下:
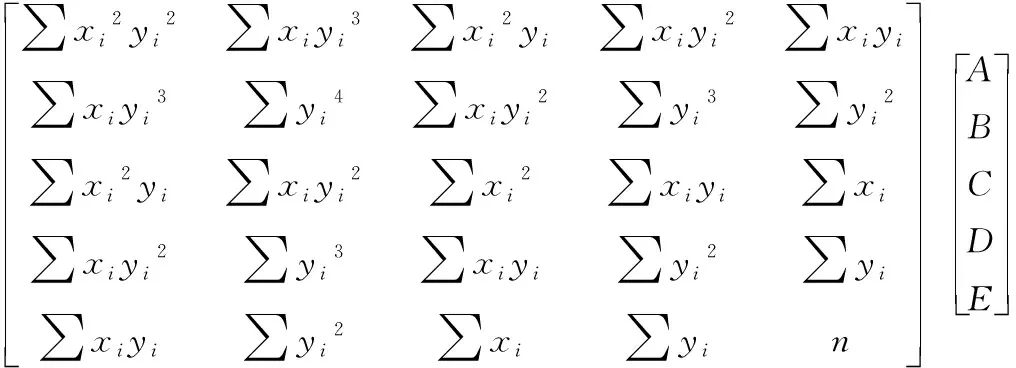
(8)
解出方程中F的各项系数,根据公式:
(9)
即可求出不同角度的By-Bx曲线的长轴倾斜角度,结果如图11所示。由图11可看出By-Bx曲线的倾斜角度与裂纹缺陷的方向呈线性关系,并随着裂纹缺陷方向角度的增大而增大。
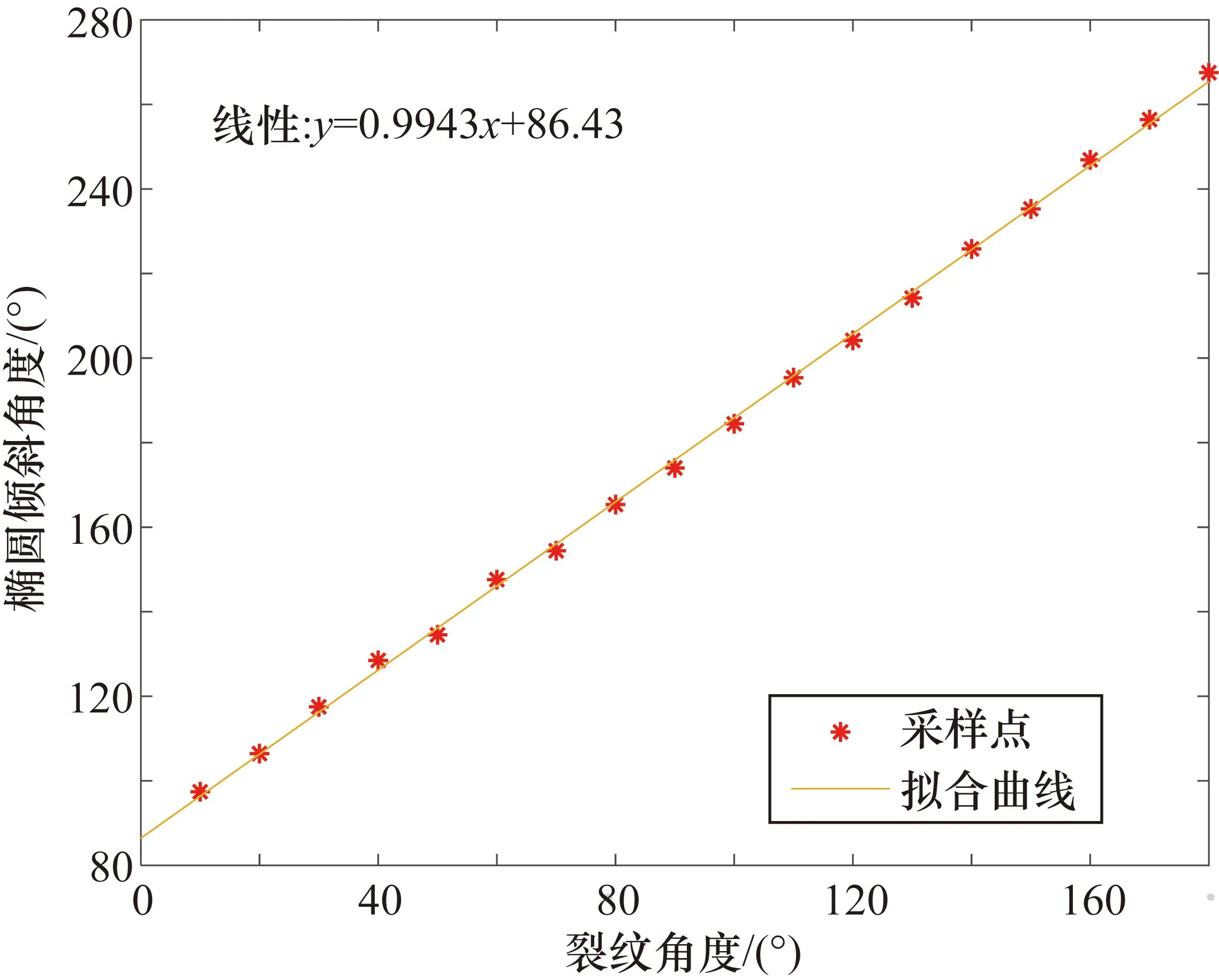
图11 By-Bx曲线的长轴倾斜角度与裂纹角度的关系
3.2 阵列点数据分析
为防止缺陷漏检,采用多点采样采集磁场信号,令相邻的两个采样点间隔为5 mm,组成一个正六边形采样阵列。当试件无缺陷时,得到每个采样点的Bx、By信号幅值如表2所示。

表2 无缺陷时各个采样点Bx、By信号幅值
由表2可知,当无缺陷时,各个采样点的信号幅度大小相似,说明旋转AFCM探头在这六点组成的六边形范围内感生出匀强磁场。当存在角度为0°的缺陷时,点1、点2、点3、中心点By-Bx曲线如图12所示。
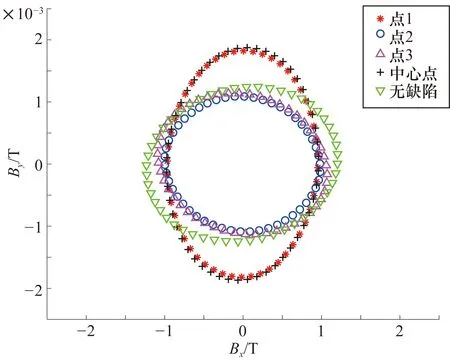
图12 点1、点2、点3、中心点By-Bx曲线
由图12可以看出,当裂纹方向为0°时,采样点1与中心点位于裂纹上方,其采集到的信号一致,而点2、点3未处于裂纹上方,采集到的信号与无缺陷时的信号一致。由此可看出,缺陷只会影响到其正上方的采样点信号。
4 结束语
本文介绍了一种基于三相交流信号的新型旋转交流电磁场传感器,由1个星形磁芯与6个激励线圈构成,并使用有限元仿真软件建立了探头模型。结果表明,该探头可以在铁磁性平板材料中心区域产生一个旋转电流场。当不存在裂纹缺陷时,试件中心区域所检测的信号幅值大小一致;当存在裂纹缺陷时,其中心点的磁场信号在X轴方向和Y轴方向的均方值比值在0°~90°内,随着角度的增大而增大,在90°~180°内,随着角度的增大而减小。其By-Bx曲线长轴的倾斜角度与裂纹缺陷的方向呈线性关系,并随着裂纹缺陷方向角度的增大而增大,因此可以根据By-Bx曲线长轴的倾斜角度来识别裂纹的方向。