复合翼无人机混合动力系统能量管理策略设计
2024-01-12朱新宇代明潇彭旭钟方媛张勋杨靖宇
朱新宇,代明潇,彭旭,钟方媛,张勋,杨靖宇
1.中国民用航空飞行学院,四川广汉 618300;2.电子科技大学成都学院,四川成都 610000
0 引言
随着小型集成电路的发展与动力系统集成化程度的提高,无人机作为一种新型的空中载运工具,广泛应用于物流运输、电力巡检及地形勘探等领域[1-3]。传统无人机的构型以多旋翼构型和固定翼构型为主,但受限于气动外形与动力布局等,2种构型的无人机在灵活起降、高速机动和高效大载荷运输等方面难以做到性能均衡[4]。为解决上述问题,王科雷等[5]、曹粟等[6]、胡安元[7]通过将固定翼与多旋翼等布局相结合的形式,提出了以垂直起降固定翼、倾转旋翼等为代表的复合翼构型,不同工况下,选择不同的动力输出方式获得飞行升力,如在垂直起降阶段使用多旋翼负载提供飞行升力、在平飞阶段依靠固定翼提供飞行升力等,实现了快速机动转场与灵活短距起降。
传统无人机的动力系统多采用单一动力源,如汽油发动机、重油发动机等内燃机或者锂电池、镍铬电池等化学电池。使用化学电池作为单一动力源时,电池使用寿命、系统能量密度以及基础设施要求等方面尚存在不足[8]。使用内燃机作为单一动力源的推进形式时,在噪音、振动以及排放等方面仍存在短板。采用燃油与电池双动力源的油电混合动力系统,面对复杂运行环境时,通过调节双动力源的输出,可以有效弥补单一动力源的不足。因此,油电混合动力系统正在成为无人机动力系统的解决方案之一[9-11]。
由于油电混合动力系统中存在2个动力输出特性不同的动力源,因此在不同工况和任务下需要通过能量管理策略与方法进行动力输出协调与分配,降低动力系统能耗。利用能量管理策略和与之配套的功率控制模块(power control unit,PCU)等,实现混合动力系统的高效运行与低碳排放[12]。传统的能量管理策略一般分为基于规则的能量管理策略与基于优化的能量管理策略,如有限状态机等基于规则的能量管理策略,设计逻辑较简单清晰,已经广泛应用于各类混合动力系统[13]。规则控制一般通过设定相应的控制阈值,将系统实际状态与阈值比较结果作为系统输入量,根据状态判定实现能量管理,实时性与运行可靠性较高。等效最小燃油消耗策略(equivalent consumption minimum strategy,ECMS)等基于优化的能量管理策略是通过对动力系统内部的运行规律进行建模分析,结合数学计算求解系统在不同条件下的最优输出与控制,实现系统的优化控制[14-16]。因此,基于优化的能量管理策略的控制精度更高、效果更好。基于相关动力装置运行的复杂性与安全性考虑,在能量管理策略研究过程中,应针对相关系统搭建仿真试验平台进行仿真试验,验证策略的可靠性与有效性[17]。胡春明等[18]利用GT-Power和Simulink软件建立了混合动力系统仿真试验平台,验证了基于模糊控制的能量管理策略在无人机上的经济性与动力性;陈剑龙等[19]提出了基于深度强化学习的无人船混合动力系统的智能能量管理策略,仿真验证了不同工况下采用该管理策略混合动力船舶的经济性和环保性。
本文中以某款最大起飞质量为25 kg、垂直起降复合翼无人机为研究对象,利用MATLAB/Simulink软件搭建串联式混合动力系统仿真运行平台,设计基于等效最小燃油消耗的能量管理策略,降低系统的能量消耗,实现系统电池电量的有效维持,为整机动力系统的优化和控制提供参考。
1 整机物理建模与飞行任务剖面设定
1.1 无人机飞行任务剖面设定
无人机的运行方式有别于汽车与轮船,根据运行工况不同,运行过程可分为垂直起降阶段、水平飞行阶段以及转换推进阶段。1)转换推进阶段。系统升力旋翼提供无人机所需升力,且无人机在水平方向处于加速阶段,负载所需功率最大,需要动力电池与发动机共同为负载供能。2)水平飞行阶段。无人机主要依靠推力螺旋桨提供推力,由固定翼为无人机提供升力,系统一般处于小负载状态,系统根据各动力源的状态,选取动力电池和发动机之一或二者联合为系统供能。3)垂直起降阶段。无人机主要依靠升力旋翼提供升力,动力系统输出功率小于转换推进阶段,但大于水平飞行阶段。为了便于分析系统的可靠性与经济性,需要设定符合实际运行要求的飞行任务剖面,保证后续仿真试验结果的可参考性,常见的无人机点对点运输剖面示意图如图1所示。依据动力系统的设计要求,无人机的实际升限为1 km,最大水平飞行速度为100 km/h。
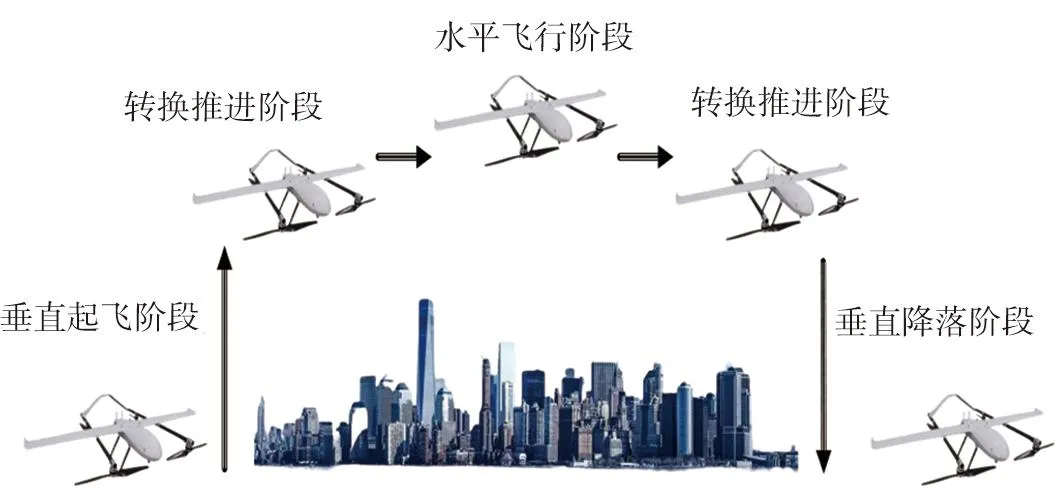
图1 无人机飞行剖面示意图
1.2 混合动力系统架构
混合动力系统根据相关动力部件的能量输出关系,一般可分为串联式、并联式以及混联式。1)串联式混合动力系统构架。内燃机作为主动力源为电动机提供转矩,电动机发电后经过整流器与电池并联接入同一节点,然后经过逆变器后为电动机负载提供电能。串联式混合动力系统的集成度较高,但对发电系统的效率要求较高。2)并联式混合动力系统。在传统内燃机驱动架构中引入电池与电动机驱动系统,实现双动力源驱动。并联式混合动系统结构简单,但整体质量较大。3)混联式混合动力系统。在串联式架构上引入发动机直驱回路与输出耦合装置,在不同工况下通过PCU的控制调节,实现双动力源间的输出调节分配。混联式混合动力系统的能量输出效率较高,但控制系统复杂,控制器运行要求较高。无人机的混合动力系统架构示意图如图2所示。
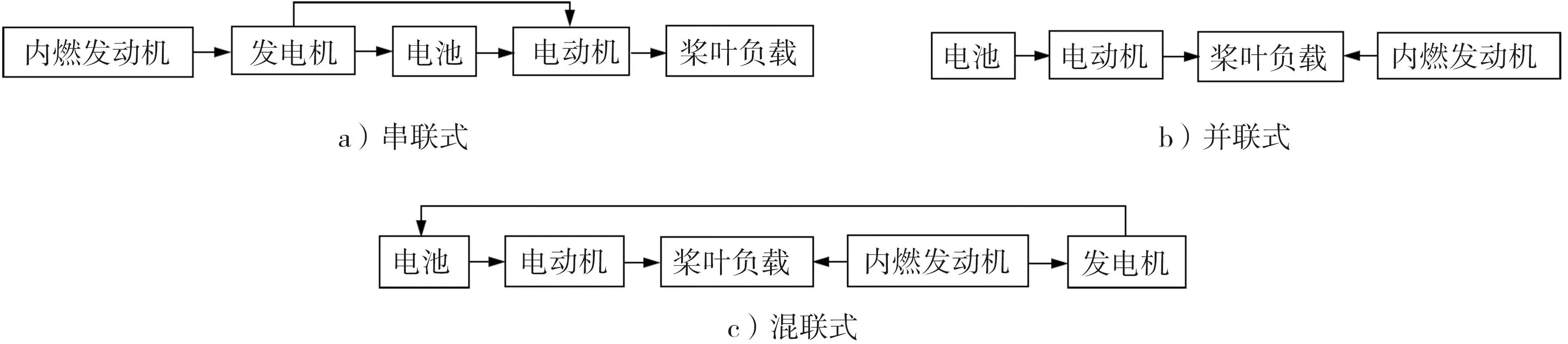
图2 混合动力系统架构示意图
考虑到复合翼无人机动力系统对总质量与体积的要求较高,本文中采用串联式混合动力系统架构,发动机与发电机组成系统的主动力源,锂电池为辅助动力电源。根据负载需求与发动机控制模块调度,对2个动力源进行叠加后得到混合动力系统的总输出。
1.3 无人机动力学建模
确定混合动力系统架构与飞行剖面后,对无人机在不同工况下的运行情况进行动力学建模。在悬停作业与水平飞行等不同飞行模式下,无人机所需推力发生变化,主要阻力为水平方向与垂直方向飞行阻力,无人机飞行工况受力分析如图3所示,图中,FT为动力装置提供的无人机总推力,FV为无人机飞行时受到的垂直方向阻力,FL为无人机飞行时受到的水平方向阻力。为了保证飞行安全,无人机推进系统提供的推力应大于无人机在不同工况下的最大推力。
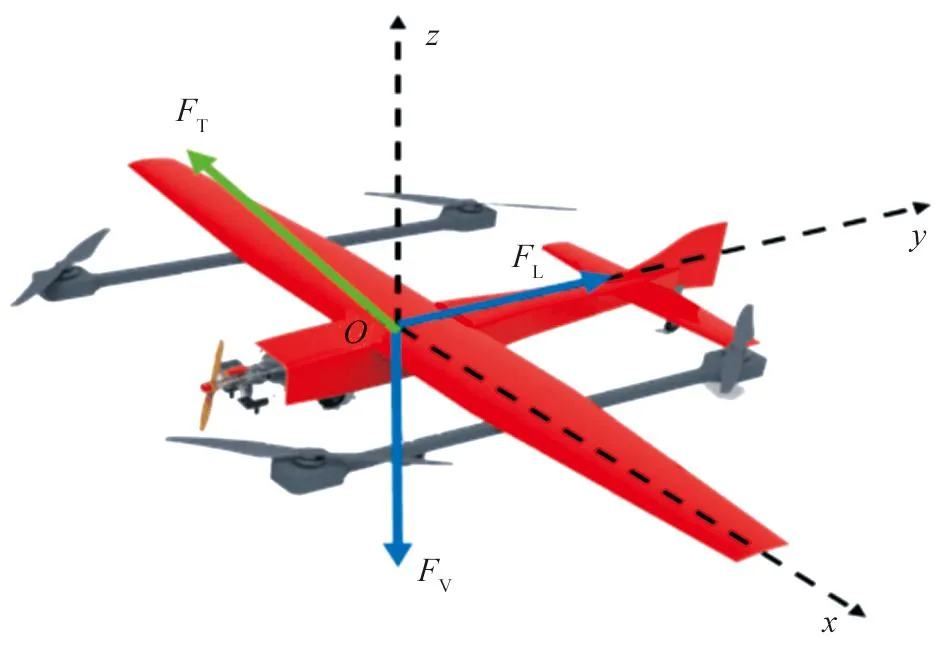
图3 无人机飞行工况受力分析
无人机所受到的垂直方向的飞行阻力
式中:ρ为飞行环境下的空气密度,kg/m3;vV为无人机在垂直方向的飞行速度,m/s;SV为无人机在垂直方向上的投影面积,m2;CDV为垂直方向上的空气阻力因数。
无人机受到的水平方向飞行阻力
式中:vL为无人机在水平方向的飞行速度,m/s;SL为无人机在水平方向上的投影面积,m2;CDL为水平方向上的空气阻力因数。
无人机动力系统提供的总推力应满足
式中:m为无人机的质量,kg;g为自由落体加速度,取g=9.8 m/s2。
无人机的基本参数如表1所示。

表1 无人机基本参数
1.4 发动机建模
混合动力系统中发动机是主要的动力源,其模型的准确性与可靠性对能量管理策略的效果具有重要影响。由于发动机的燃烧过程十分复杂,与其相关的动力输入输出具有高度的耦合关系,通过正向原理建立发动机模型过程十分复杂且可靠性难以保证。从建模精度与可靠性等多方面考虑,采用基于试验数据的逆向建模方法对发动机建模,并将发动机建模过程获取的各项参数用于仿真平台的参数设定。
发动机的动力输出应保证无人机在水平飞行与悬停飞行过程中满足系统最大功率需求,并且发动机的功率输出应满足发动机设计边界条件。
发动机最大输出功率应满足:
Peng,maxηT≥max(Plevel,max,Phover,max),
式中:Peng,max为发动机最大输出功率,kW;ηT为发动机输出到发电系统的总效率;Plevel,max为水平飞行状态下系统的最大需求功率,kW;Phover,max为垂直作业工况下的最大需求功率,kW。
根据系统对发动机的需求转矩与转速,计算发动机的输出转矩、功率和油耗,计算依据为通过混合动力系统地面实验台架模拟飞行工况试验得到的发动机燃油消耗特性图[20-21],如图4所示。
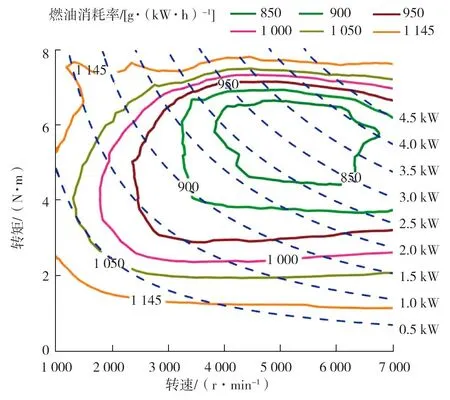
图4 发动机燃油消耗特性图
1.5 发电机与驱动电机建模
在混合驱动模式下,串联式混合动力系统发电机的输出功率随不同转速下的效率变化而改变,电动机的需求功率同样受到电动机效率的影响。
发电机输出功率Pgen的计算式为:
{Pgen}={Tgen}{ngen}ηgen/9550,
式中:{Pgen}为以kW为单位的发电机输出功率Pgen的数值;{ngen}为以r/min为单位的发电机转速ngen的数值;{Tgen}为以N·m为单位的发电机转矩Tgen的数值,Tgen=min(Tgen,target,Tgen,max),其中Tgen,target为发电机的目标转矩,Tgen,max为发电机的最大输出转矩,;ηgen为发电机的输出效率。
电动机输出功率Pmot的计算式为:
{Pmot}={Tmot}{nmot}ηmot/9950,
式中:{Pmot}为以kW为单位的电动机输出功率Pmot的数值;{nmot}为以r/min为单位的电机转速的数值;{Tmot}为以N·m为单位的电动机转矩Tmot的数值,Tmot=min(Tmot,target,Tmot,max),其中Tmot,target为电动机的目标转矩,Tmot,max为电动机的最大输出转矩;ηmot为电动机的输出效率。
1.6 动力电池建模
动力电池为混合动力系统的辅助动力源,动力电池的建模影响混合动力系统中对电池荷电状态(state of charge,SOC)的估算精度,进而影响混合动力系统的输出。
无人机的动力电池输出功率
Pbatt=UbattIbattηdis,
式中:Ubatt为动力电池的开路电压,V;Ibatt动力电池电流,A;ηdis为动力电池的放电效率。
无人机的动力电池容量

式中tf为动力电池电量放尽时的工作时间。
混合动力系统中,纯电动推进模式下,要求电池电量应保证无人机安全降落飞行,Pbatt应满足
Pbattηmot≥min[Phover(t),Plevel(t)],
式中:Phover(t)为垂直方向上需求的功率,kW;Plevel(t)水平方向上需求的功率,kW。

为保证动力电池的使用寿命与安全,应在安全的放电深度下进行充放电,放电深度
式中:Qini为电池的最大电量,A·h。
在上述基础上,无人机混合动力系统中的电池电量
式中Preq为负载需求功率。
电池在混动系统中工作时,其内部电量与电化学特性呈现非线性变化,因此一般采用试验的逆向建模方法进行建模。基于电池在充电与放电2个不同阶段内部电学特性变化,采用Rint改进模型,模型示意图如图5所示。参考混合功率脉冲特性试验辨识电池相关参数,试验辨识过程如6所示。

图5 改进Rint电池等效模型示意图 图6 混合功率脉冲测试过程
根据上述各部件的建模结果结合飞机飞行剖面动力需求,无人机串联式混合动力系统的参数匹配结果如表2所示。
2 能量管理策略设定与仿真平台搭建
2.1 运转工况
根据负载需要的功率不同,无人机在实际运行中的常见工况可分为混合动力运转工况、纯电运行工况及发动机运行工况,混合动力系统运行的流程图如图7所示。
混合动力模式下,无人机的动力需求大于任何单一动力源的动力输出时,需要发动机与动力电池共同为负载提供能量。此时,发动机依据功率需求、经济油耗区间以及转矩要求确定输出功率,由动力电池补充其余能量。在动力电池高于电池SOC上限时,采用纯电驱动,动力电池提供负载所需全部功率。当飞机处于水平机动飞行等小功率工况时,参考电池SOC情况,采用发动机驱动模式,发动机工作在最优能耗区间,多余的功率通过发电机和整流器为动力电池充电。
2.2 能量管理策略的设计
基于优化策略的实时性与优化效果,系统采用了基于ECMS的能量管理策略以实现混合动力系统的能量消耗最优控制,其中,ECMS基于庞特里亚金极小值(Pontryagin minimum principle, PMP)原理在能量管理问题上的延伸应用将系统的一般优化问题转化为系统的增广代价函数求极值来进行求解。
增广代价函数
式中:x(t)为系统的状态量,u(t)为系统的输入量,L为系统的瞬时代价函数,f为系统状态函数,φ为系统状态惩罚因子,xf为系统最终状态,υ为最终态偏移量。
根据PMP原理,引入协状态量λ对应的哈密尔顿函数
H[x(t),u(t),λ(t),t]=L[x(t),u(t),t]+λ(t)f[x(t),u(t),t],
式中控制量u(t)为发动机直驱发电机的输出功率PE。因此其最优控制序列
混合动力系统的能量管理可看作是一个有约束条件的最优控制问题,其状态量方程为:

式中:SOC(t)为系统动力电池荷电状态函数,R0为等效动力电池模型中的内阻,Pbatt为动力电池输出功率。
对应的哈密尔顿函数以及求解的必要条件为:
式中:mf为发动机的燃油消耗,g。
基于PMP原理的ECMS能量管理策略将系统的整体消耗视为燃油消耗,将电池视为系统能耗的缓冲装置。也就是说,当系统中的电池处于放电状态时,可以认为系统需要消耗额外的燃油补充其消耗的电能;当系统中的电池处于充电状态时,多消耗的燃油可以在将来为系统提供额外的能量供应,减小系统的燃油消耗。
系统的等效燃油消耗率

建立系统状态量SOC的状态方程为:
式中SOC为电池的荷电状态。
根据该方程对基于PMP原理的哈密尔顿函数进行改写,可得:
混合动力驱动形式下,系统的基本目标为电量维持,因此系统的目标代价函数
(1)
式中SOC,req(t)为系统需求动力电池荷电状态函数。
对式(1)进行求导计算,可以得到等效因子s(t)的求解方程

式中φ为系统SOC偏离预定之后的惩罚因数。
通过调整等效因子s(t),可实现不同工况下的等效油耗计算,在复合翼无人机混合动力系统实现基于ECMS能量管理策略的流程图如图8所示。
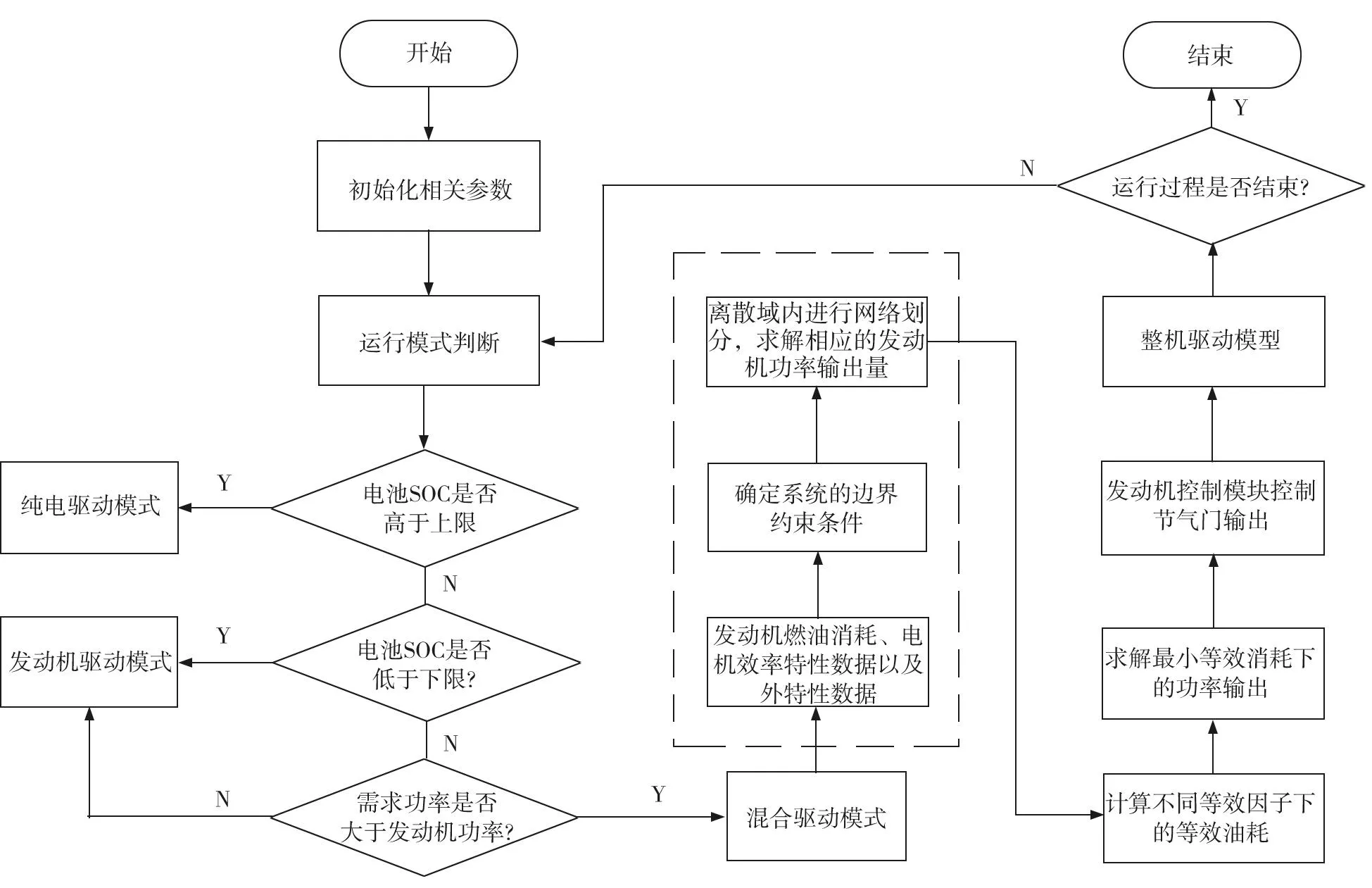
图8 ECMS能量管理策略流程图
2.3 基于MATLAB/Simulink搭建的仿真试验平台
通过MATLAB/Simulink对复合翼无人机混合动力系统进行逆向试验建模分析后,基于相关的试验数据以及系统拓扑,搭建相关的仿真试验平台,复合翼无人机混合动力系统仿真模型及其系统组成示意图如图9所示。仿真平台的主要模块由初始化模块、任务载荷模块、混动控制模块、混合动力装置模块与输出数据显示模块组成。初始化模块与任务负载模块提供混合动力系统的动力需求参数,通过计算模块输入混合动力装置模块中,混合动力控制模块根据需求功率与发动机输出功率和电池SOC情况决定系统的动力输出模式,确定各动力源的功率输出分配。混合动力装置模块内部主要由发动机模块、发电机模块、负载模块、动力电池模块以及燃油计算模块共同组成。输出数据显示模块用于显示无人机及动力系统的运行状态,主要显示无人机发动机输出功率、实时飞行速度、无人机飞行距离、燃油消耗量以及动力电池SOC情况。
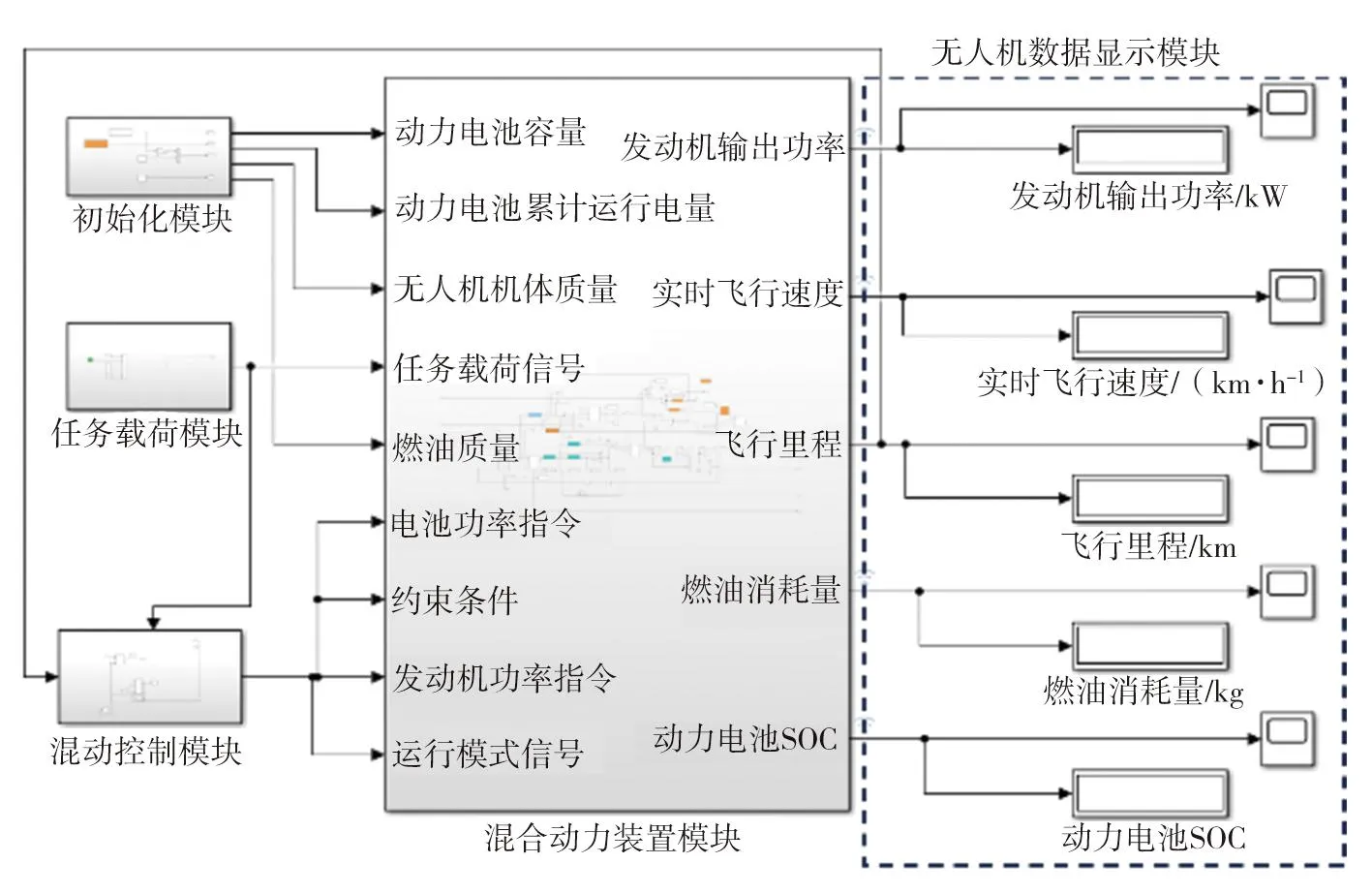
图9 复合翼无人机混合动力系统仿真模型及其系统组成示意图
3 仿真结果与分析
由于混合动力无人机的研究尚处于起步阶段,目前没有国际统一的成熟标准化工况,因此,仿真平台试验中,以1.1节制定的无人机常见运行剖面为基础的无人机点对点飞行作业工况与多点悬停作业工况作为试验参考工况。
点对点飞行是无人机在进行快速物资转运和地形勘测等作业时的主要运行工况之一,其对动力系统在高速平飞状态下的可靠性和速度跟随响应方面有较高要求。设置单点飞行距离为40 km、最大平飞速度为100 km/h,混动复合翼无人机点对点飞行作业动力系统仿真结果如图10所示。
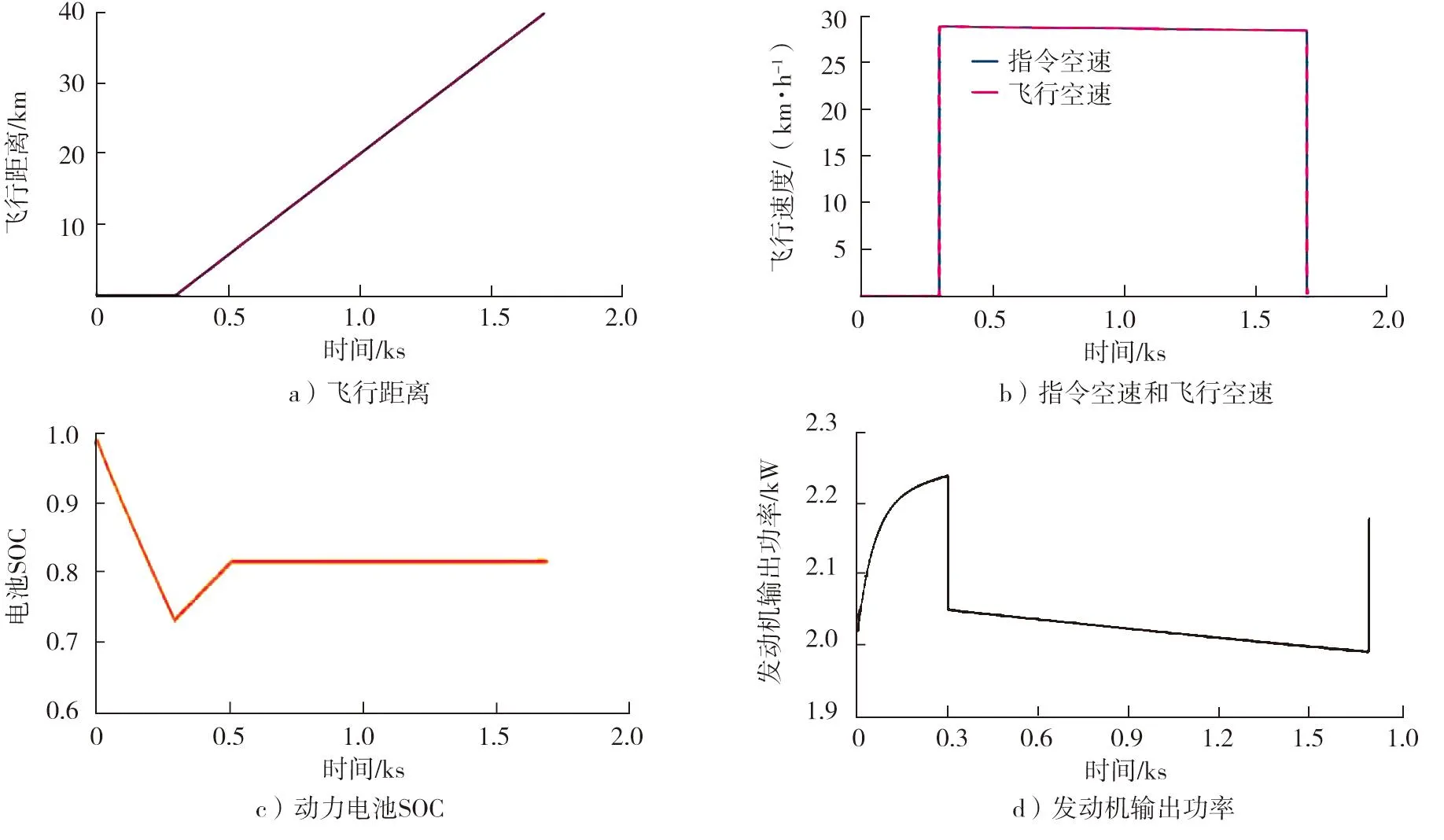
图10 混动复合翼无人机点对点飞行作业动力系统仿真结果
由图10可知:在点对点工况下,无人机实际飞行空速和指令空速基本一致,无人机的速度跟随情况良好,可以满足无人机在点对点飞行工况的动力输出要求;在经过垂直起飞阶段的大功率输出后,动力电池SOC有所下降,但在高速平飞阶段,通过发动机补充能量后,动力电池SOC可以维持到系统设定的SOC附近,与设定SOC的相对误差小于1.2%;在整体运行期间,在垂直起降阶段发动机的输出功率增大,在平飞阶段后,系统因燃油消耗,无人机飞行总质量减小,输出功率降低,维持在2 kW附近。
多点悬停作业是复合翼无人机目前进行长距离与多目标作业主要场景之一,其飞行剖面是在点对点飞行剖面的基础上添加多个悬停作业点,以满足任务要求。因此,在进行点对点飞行试验基础上,设置无人机的飞行距离为100 km、最大飞行速度为100 km/h,无人机在5个作业点进行多点悬停作业,每次悬停作业进行载荷卸载,模拟物品投放,进行多点悬停作业工况下的仿真试验,混动复合翼无人机多点悬停作业飞行动力系统仿真结果如图11所示。由图11可知:系统运行期间无人机动力系统的速度跟随良好,能够满足无人机在飞行工况下的要求;无人机在连续多点悬停运行期间,动力电池SOC发生下降,但在进行长距离平飞转场后,动力电池SOC可以得到有效控制,最终稳定在设定的0.82附近,飞行终了时刻系统的相对误差小于1.5%,在飞行任务中未出现动力电池过放或过充现象;发动机在悬停期间处于高功率输出状态,输出功率维持在2.25 kW左右,在水平飞行时发动机输出功率明显下降,长距离飞行时由于燃油消耗飞行质量下降,最低输出功率维持在1.5 kW左右。
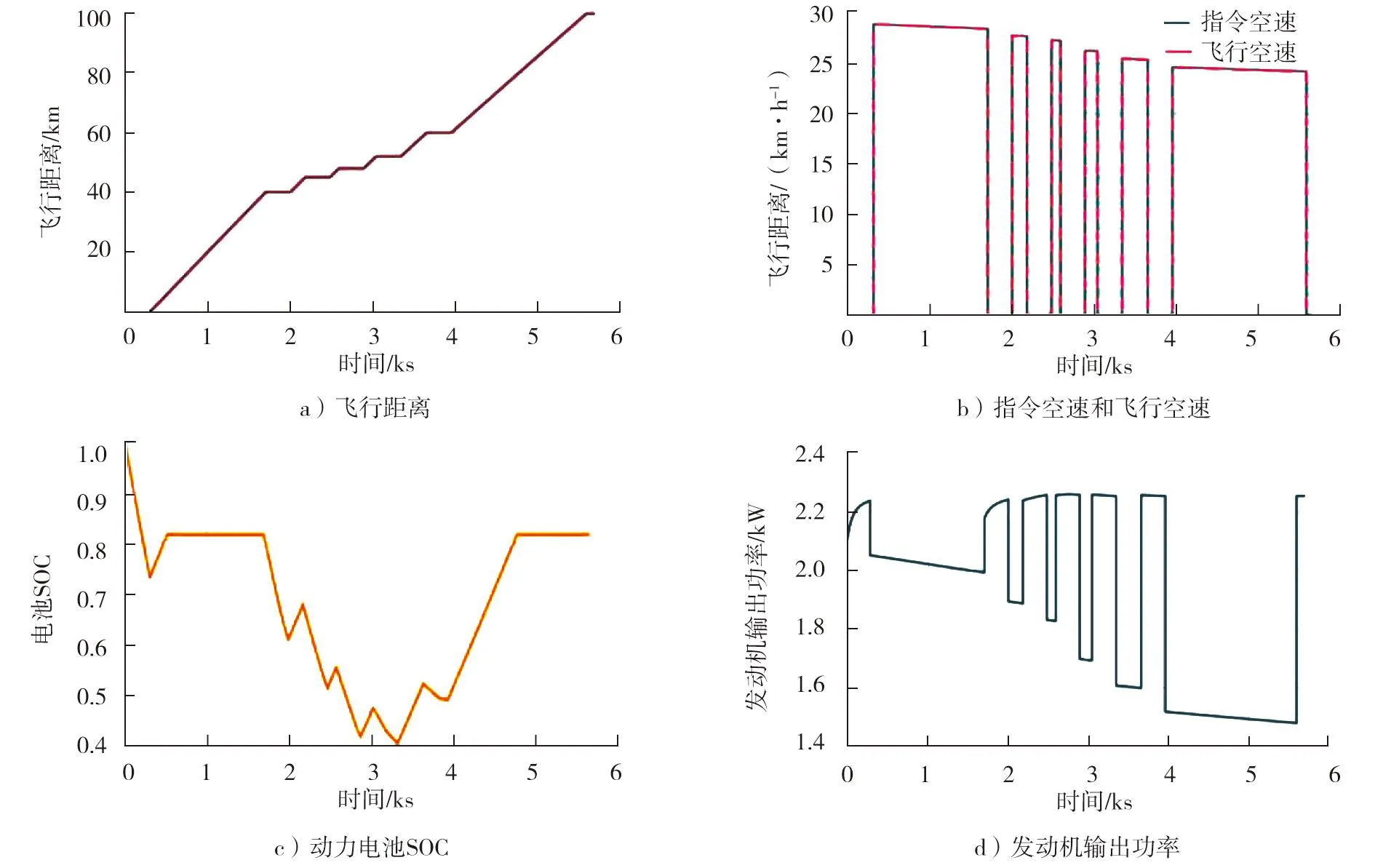
图11 混动复合翼无人机多点悬停作业飞行动力系统仿真结果
降低混合系统的燃油消耗是能力管理策略的主要目的,进行飞行工况仿真试验后,仿真分析基于ECMS能量管理策略的混合动力无人机运行中的燃油经济性,并与基于专家经验设定的恒温器规则运行策略进行对比。ECMS能量管理策略的控制规则为:当系统SOC低于设定阈值时,发动机工作在高功率运行模式,节气门开度设定为95%;当系统SOC高于设定阈值上限时,发动机工作在低功率运行模式,节气门开度设定为35%;当系统SOC处于上下限之间时,节气门设定与上一时刻相同。不同工况、不同策略下混合动力无人机燃油消耗曲线如图12所示,设定飞行剖面下的燃油消耗与SOC变化如表3所示。

表3 设定飞行剖面下的燃油消耗与SOC变化
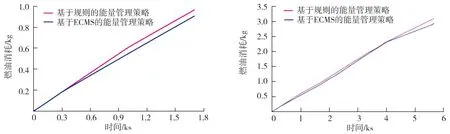
a)点对点飞行工况 b)多点悬停飞行工况图12 不同策略、不同工况下混合动力无人机燃油消耗曲线
由图12及表3可知:与基于专家经验设定的恒温器规则运行策略相比,无人机在进行点对点飞行作业时,基于ECMS能量管理策略下的动力系统的燃油消耗明显下降,系统燃油消耗降4.91%;进行多点悬停飞行作业时,基于ECMS能量管理策略的无人机能够降低混合动力系统燃油消耗、维持混合动力系统SOC的有效性,系统油耗降低5.49%。
4 结论
对采用串联式混合动力的一款最大起飞质量为25 kg的复合翼无人机系统为研究对象,设计了满足油电混合动力系统与飞行任务要求的能量管理策略,并进行了无人机的动力性与经济性仿真试验。
1)混合动力系统在设定飞行工况下具有良好的动力跟随性,在设定的飞行剖面下,混合动力系统可以较好地维持动力电池的SOC,满足无人机飞行任务需求。
2)在设定飞行剖面下,与基于专家经验的规则控制策略相比,基于ECMS能量管理策略混合动力系统无人机在点对点飞行和多点悬停工况下的油耗分别降低了6.07%与5.49%,基于ECMS的能量管理策略可以有效降低复合翼无人机的燃油消耗,提高系统经济性。
