Virtual Commissioning 技术在冲压自动化中的应用
2024-01-11冯国明
狄 波,冯国明,王 彬
(济南二机床集团有限公司,山东济南 250022)
1 冲压自动化调试现状
冲压自动化调试过程中的设备送料部分,以冲压线压机间的双臂送料以及单台多工位压机内部的送料为例。实际最终客户提出了设备需求之后,需要设备制造商厂家进行机械概念设计,然后进行细节工程设计包括:机械设计、电气设计以及软件设计,最后调试阶段需要真实设备安装完成之后再进行电气调试,这些阶段基本都是串行进行的。引入的虚拟调试数字孪生技术,其中机械细节工程设计阶段,机械设计、电气设计以及软件设计就可以基本实现并行设计,这样就变成了协作工程设计,会极大的缩短调试时间(图1)。
2 虚拟调试技术原理及实现
2.1 虚拟调试的概念
虚拟调试全称Virtual Commissioning,也称为数字孪生Digital Twin,通过虚拟调试可以提前测试冲压自动化干涉等问题隐患,测试PLC 程序内部的故障逻辑,也可以实现工程人员提前进行培训和操作演练,能够带来时间、人工以及材料成本的节约。
2.2 虚拟调试技术理论介绍
虚拟调试通常由硬件在环和软件在环两种方式,其中硬件在环(图2)是指利用实际的PLC 以及SIMIT Unit 仿真逻辑程序以及自动化过程,利用NX MCD 仿真工艺和机械部件运动,利用SIMIT 软件仿真电气自动化的行为。

图2 硬件在环虚拟调试
软件在环虚拟调试如图3 所示,基本原理就是所有的仿真均为软件仿真,在计算机上完成全部仿真过程。针对硬件在环,利用PLCSIM Adv 仿真PLC 程序逻辑,利用Wincc Runtime 仿真HMI,NX MCD(机电一体化概念设计)仿真设备的运动。这样整体组成了纯粹的软件仿真。

图3 软件在环虚拟调试
2.3 虚拟调试基本行为建模(图4)
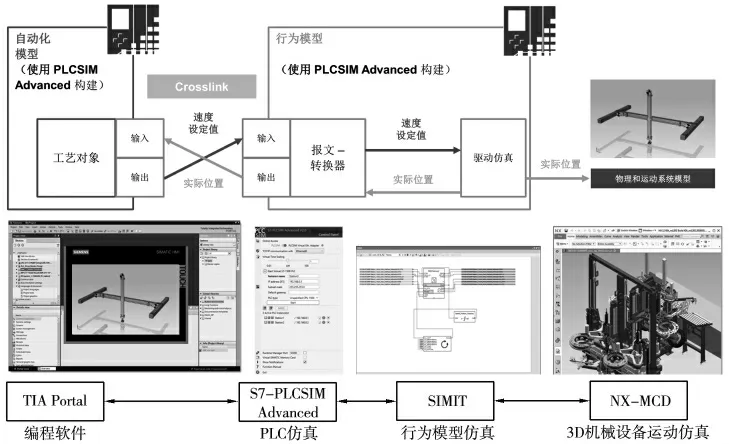
图4 验证冲压自动化运动控制功能
2.3.1 自动化模型
利用PLCSIM Advanced 构建项目中冲压自动化设备中实际运动轴对应的工艺对象,工艺对象向驱动部分发送经过PLC内部位置环运算插补后的速度设定值。
2.3.2 行为模型
利用SIMIT 构建报文转换器,将PLC 侧速度设定作为输入,通过接收到实际NX MCD 设备运动反馈的位置信息,通过输出发送给PLC 作为位置反馈。
2.3.3 3D 物理运动模型
通过NX 软件可以进行机械部件的3D 设计,并且利用NX MCD 对机械部件赋予物理属性,例如刚体、碰撞体以及运动副的约束,通过速度控制、位置控制赋予运动控制属性,通过MCD Coupling 方式与SIMIT 仿真软件互通。
3 虚拟调试实现过程及冲压自动化上实际应用
3.1 虚拟调试实现过程
3.1.1 NX MCD 设计
NX 软件本身可以进行机械部件的建模,可以将冲压自动化设备各个部件进行建模装配,如果部件本身是由其他设计软开发的,NX 软件也可以导入3D 文件。上述两种方式都可以获取设备的装配总图。导入之后进行打包分组如图5 所示,根据自动化设备本身的运动特性,例如双臂横杆是整体送进方向移动的,将横杆和相关的部件归结为一个整体。可以移动的组件可以整体设定为刚体,也可以依据机械设计过程中刚体部件的质量和质心制定惯性矩也就是惯量,依据实际运行情况设定相关平面的摩擦因数。

图5 NX MCD 设计
针对设置好的刚体、碰撞体、传输面、对象源、对象收集器以及碰撞传感器之后,针对机械结构本身实际设计的运动属性,设定相关的约束,如滑动副、固定副、柱面副、铰链副、球副或者齿轮和凸轮耦合等运动学属性。本应用使用了铰链副、滑动副以及固定副,组成运动副的两个机械构建只能绕某一轴线作相对旋转的运动副,铰链副具有一个旋转自由度。滑动副:组成运动副的两个构件之间只能按照某一方向作相对移动,滑动副具有一个平移自由度,固定副将一个构件固定到另一个构件上,固定副所有自由度均被约束,自由度为零。
针对相关的运动副设定运动控制关系,例如速度控制、位置控制等信息。本应用主要进行了位置控制和速度控制,位置控制驱动运动副的轴以一定预设的恒定速度运动到某一预设位置,并且限制运动副的自由度。速度控制驱动运动副的轴以一预设的恒定速度运动(图6)。

图6 定义位置控制或速度控制
NX MCD 设置的相关变量信息在进行仿真时通过设置MCD Coupling 的方式与SIMIT 软件进行关联。
3.1.2 SIMIT 设计
SIMIT 设计连接主要包含两个部分与NX MCD 的连接通过MCD Coupling 的方式,与PLCSIM Adv 的连接通过默认的设定即可,SIMIT 耦合方式如图7 所示。

图7 SIMIT 耦合方式
本应用使用的PLCSIM Advanced 和Mechatronics Concept Designer 耦合方式。
SIMIT 主要是仿真行为模型以及驱动报文,NX MCD 定义好相关的速度或位置控制后,SIMIT 仿真驱动报文关联耦合相应的NX MCD 中反馈的实际位置和速度。本应用使用了2 号报文,关联相关的输入输出数据(图8)。
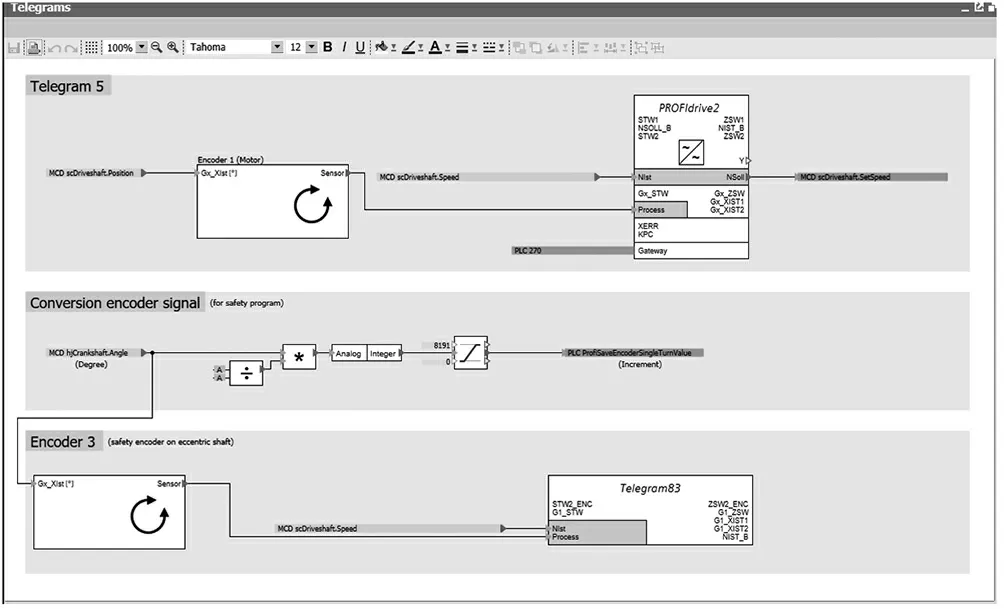
图8 SIMIT 驱动报文仿真
SIMIT 还能进行行为模型的仿真,例如冲压自动化设备上的操作按钮、模式开关以及急停按钮等(图9)。

图9 操作按钮、模式切换以及急停等信息
SIMIT 还可以依据实际使用情况编写相关的信号逻辑、数学运算等,本应用所使用的转速转换运算如图10 所示。

图10 转速转换运算
3.1.3 PLCSIM 和HMI
SIMIT 采用了PLCSIM Advanced 的耦合方式,启动SIMIT 仿真时会自动开启一个PLCSIM Advanced 的实例,这样TIA Portal程序通过该实例进行在线连接下载,相应的程序就会在PLCSIM Advanced 的实例里面运行,至此整个虚拟仿真的搭建完毕。
3.2 实例应用
实际的实例应用到压机与压机间的双臂送料以及多工位送料中:①NX MCD 与SIMIT 采用了Mechatronics Concept Designer 耦合方式;②PLC 程序逻辑仿真采用了PLCSIM Advanced;③PLCSIM Advanced 与SIMIT 采用了PLCSIM Advanced耦合方式;④仿真了送料的单次、连续、循环停止以及急停等主要功能;⑤采用了软件在环的虚拟调试技术。
4 结束语
目前使用虚拟已经应用到多个项目,优点如下:①节省调试时间。在机械设计3D 图纸完成之后,就可以进行调试,不需要设备安装,缩短了调试时间;②避免程序逻辑问题导致机械部件损坏。虚拟调试软件在环,在计算机上进行调试,重要功能可以提前检查处程序错误,避免由于程序的逻辑问题造成机械部件损坏,更好更快的完善程序;③培训以及客户展示。针对客户的培训以及展示,使用计算机即可,可以在实际设备未完成调试之前,就可以培训以及向客户展示,设备的主要功能,非常形象和直观。
随着中国制造2025 和中国制造2035 发展规划的提出,国家大力发展数字化工业,虚拟调试数字孪生作为数字化的重要环节,将发挥越来越重要的作用。
