基于室内LBS技术的IOS平台点对点通信目标自动定位仿真*
2024-01-10邹洪宇
邹洪宇
(福建水利电力职业技术学院 建筑工程学院,福建 永安 366000)
IOS平台是具备多点触控直接操作的服务系统[1],主要应用在苹果公司出品的电子设备上。近年来随着手机、运动手表潮流的发展,使用IOS平台电子设备的用户越来越多,当用户进行视频通话、地图导航以及位置共享时,均依托IOS平台点对点通信实现[2-3],此时对IOS平台点对点通信目标自动定位需求较强。现在也有很多学者研究IOS平台点对点通信目标定位方法,其中以傅彬和苟平章等人研究的通信目标定位方法应用最为广泛。前者将鲸鱼算法与生物共生算法融合后,利用其建立IOS平台点对点通信目标定位函数[4],然后利用自适应优化方法求解该通信目标定位函数后,得到IOS平台点对点通信目标位置。但该方法在应用过程中受IOS平台点对点通信时无线传感网络节点密度和锚节点比例影响,定位效果较差。后者则通过计算IOS平台点对点通信时锚节点平均跳距和实际距离之间的差值,使用多通信半径和多跳跳数偏差对锚节点平均跳距和实际距离的差值进行修正,然后使用WSNs三维节点定位方法得到IOS平台点对点通信目标位置[5]。该方法在修正锚节点平均跳距和实际距离的差值时,受锚节点跳数较多影响,存在偏差,最终导致该结果应用效果不佳。
随着移动网络的发展,基于位置服务的LBS技术越来越融入人们生活。LBS技术也被应用到IOS平台内,其属于IOS平台的无线增值技术,利用LBS技术可获取IOS平台点对点通信时无线用户位置信息。LBS技术目前被应用在位置共享、追踪、救援等多个领域,应用范围极其广泛[6-7]。本文在此以LBS技术作为基础,提出基于室内LBS技术的IOS平台点对点通信目标自动定位仿真方法,以提升IOS平台点对点通信目标定位效果。
1 IOS平台点对点通信目标自动定位仿真方法
1.1 IOS平台点对点通信架构
要实现IOS平台点对点通信目标精准定位目的,需首先利用应用IOS平台的移动终端获取用户当前的地理位置[8],LBS技术也是以IOS平台为基础,才可以获取目标位置。为此给出IOS平台点对点通信架构,如图1所示。
用户可以通过可触摸层获取联系人信息、广告信息、显示邮件等信息,同时实现对相关数据类型的信息传输交互。也可利用媒体层内的图像引擎、音频引擎和视频引擎实现点对点流媒体类信息交互。IOS平台点对点通信架构内的核心服务层为用户提供点对点通信时的网络访问功能、数据存储功能、定位功能以及用户运动过程中的加速度、方向等相关数据服务。核心系统层为用户提供各种运算和安全管理等相关功能,保障IOS平台点对点通信时的安全性。
1.2 点对点通信锚节点分布范围获取
以基于LBS技术的IOS平台点对点通信架构为基础,利用面向对象程序语言Objective-C访问IOS平台热点访问接口,通过该接口扫描IOS平台点对点通信时AP(WiFi信号接入点)的MAC地址(唯一身份标识)、RSSI值(WiFi信号强度)以及其锚节点信息。令Q表示第i个IOS平台点对点通信目标通信时的锚节点,该锚节点的坐标由(Xi,Yi)表示,表达公式如式(1):
Q(Xi,Yi)={(Mac1,RSSI1),…(Macn,RSSIn)}
(1)
式中,Macn、RSSIn分别表示IOS平台点对点通信目标参考点数据的AP的MAC地址和RSSI值;n表示IOS平台点对点通信时AP数量。
由于IOS平台在点对点通信时,其目标参考点上会出现多个锚节点,当在该目标参考点上采集m个锚节点时,需对MAC地址进行统计,以该统计值为基础,则式(1)可改写为:
(2)
式中,ns表示锚节点采集数据组数;nMAC表示AP数量。
IOS平台点对点通信时受WiFi信号强度影响,其点对点通信时的锚节点存在时变特性和波动性[9-10],因此需对其噪声进行抑制处理。利用式(2)得到IOS平台点对点通信目标参考点数据锚节点后,利用ROF(Rudin Osher Fatemi)去噪模型去除IOS平台点对点通信目标参考点数据锚节点内存在的噪声。
将式(2)结果带入到ROF去噪模型内,其表达式如式(3):
(3)

对式(3)进行能量泛函处理,得到全变分去噪能量泛函E,其表达公式如下:
(4)
式中,TV(Qm(Xi,Yi)表示锚节点能量函数,其表达公式如下:
(5)
利用欧拉-拉格朗日方程对式(4)进行最小化处理,则有:
-Qm(Xi,Yi)′)≈0
(6)
式中,E′表示能量泛函E对Qm(Xi,Yi)的梯度。当该公式成立时,则完成IOS平台在点对点通信时数据锚节点噪声抑制[11-13],得到不含噪声的IOS平台在点对点通信时数据锚节点Qm(Xi,Yi)′。
利用式(6)得到不含噪声的IOS平台在点对点通信时数据锚节点后,利用均值方法计算Qm(Xi,Yi)′内每个AP的信号强度,其表达公式如式(7):
(7)
以式(7)结果为基础,构建IOS平台点对点通信锚节点数据存储格式,其表达公式如下:

(8)
式中,H表示IOS平台在点对点通信锚节点数据存储格式。
依据式(8)的IOS平台点对点通信锚节点数据存储格式,则其锚节点分布范围表达公式如式(9):
D=[Q1,Q2,…,Ql]
(9)
式中,l表示IOS平台在点对点通信目标室内参考点总数。
基于上述过程,设置扫描IOS平台点对点通信锚节点采集次数、时间,采集IOS平台点对点通信锚节点[14-15]并对其进行噪声抑制和按照其存储格式进行存储后,得到IOS平台在点对点通信时室内锚点分布范围。
1.3 基于LBS的点对点通信目标定位方法
1.3.1 点对点通信目标移动区域路径获取
在IOS平台点对点通信锚节点分布范围D=[Q1,Q2,…,Ql]内,使用非线性模型中的无损卡尔曼滤波器获取IOS平台点对点通信时目标移动区域路径,其详细过程如下:
第i(i=1,2,…,I)个IOS平台点对点通信锚节点在第k(k=1,2,…,K)个迭代周期时的状态方程表达如式(10)所示,其中I表示锚节点个数,K表示锚节点通信迭代周期个数。
Xi(k)=Xi(k-1)+ϖi(k)
(10)
式中,ϖi(k)表示第i个锚节点权重数值;Xi(k)表示锚节点状态向量。
依据锚节点在迭代周期内的状态,计算目标锚节点对第i个锚节点的量测值,其量测方程表达如式(11):
Zi(k)=g(Xi(k))+ζi(k)
(11)
式中,Zi(k)表示第i个锚节点的量测向量;g(·)表示量测函数;ζi(k)表示锚节点移动速度。在式(11)中,Zi(k)也表示目标锚节点节点和第i个锚节点之间的距离,该距离表示第i个锚节点在IOS平台点对点通信时移动的总路径。
1.3.2 目标锚节点位置计算
三边测量法是基于测距的定位方法,其是室内LBS技术的一种。该方法通过在平面内选取一系列控制点,将其连接成若干个三角形后,形成网状图形,再依据已知的控制点坐标和边长,解算三角形即可得到三角形坐标方位角,依据该方位角计算未知点的平面坐标。三边测量法计算未知点坐标较为精准,通常被应用在测绘、建筑设计、勘探等多个领域。在此将三边测量法计算应用到IOS平台点对点通信目标自动定位过程中,其实现步骤如下:
令A1、A2、A3为三个已知的IOS平台点对点通信锚节点,其分布位置如图2所示。

图2 IOS平台点对点通信锚节点分布示意图

(12)
利用式(12)即可得到待定位目标锚节点P的位置坐标。
依据三边测量法计算待定位目标锚节点位置坐标和1.3.1小结得到的第i个锚节点在IOS平台点对点通信时移动总路径,设计基于三边测量法的IOS平台点对点通信目标自动定位策略,该目标自动定位策略步骤如下:
第一步:依据式(11)得到的第i个锚节点在IOS平台点对点通信时移动总路径数值,锚节点i遍历锚节点分布范围D=[Q1,Q2,…,Ql]。该锚节点在遍历过程中,持续向四周发送无线信号,当有未知节点进入到锚节点i的通信半径内,锚节点i会接收到未知节点进入信号。
第二步:判断未知节点是否具备三个或者三个以上的非共线锚节点信息,若是则进行下一步,反之则忽略该未知节点。
第三步:利用式(11)计算未知节点三个或三个以上非共线锚节点到锚节点i的距离,依据该距离,利用式(8)计算未知节点坐标。
至此,经过上述步骤,完成IOS平台点对点通信目标自动定位。
2 仿真实验分析
为验证本文方法在自动定位IOS平台点对点通信目标的性能,以某公司室内办公区内的IOS平台为实验对象,IOS平台的无线传感网络区域呈不规则拓扑形状,无线传感网络节点分布如图3所示。使用MATLAB仿真软件搭建IOS平台无线传感网络环境,该无线传感网络环境详细参数如表1所示。
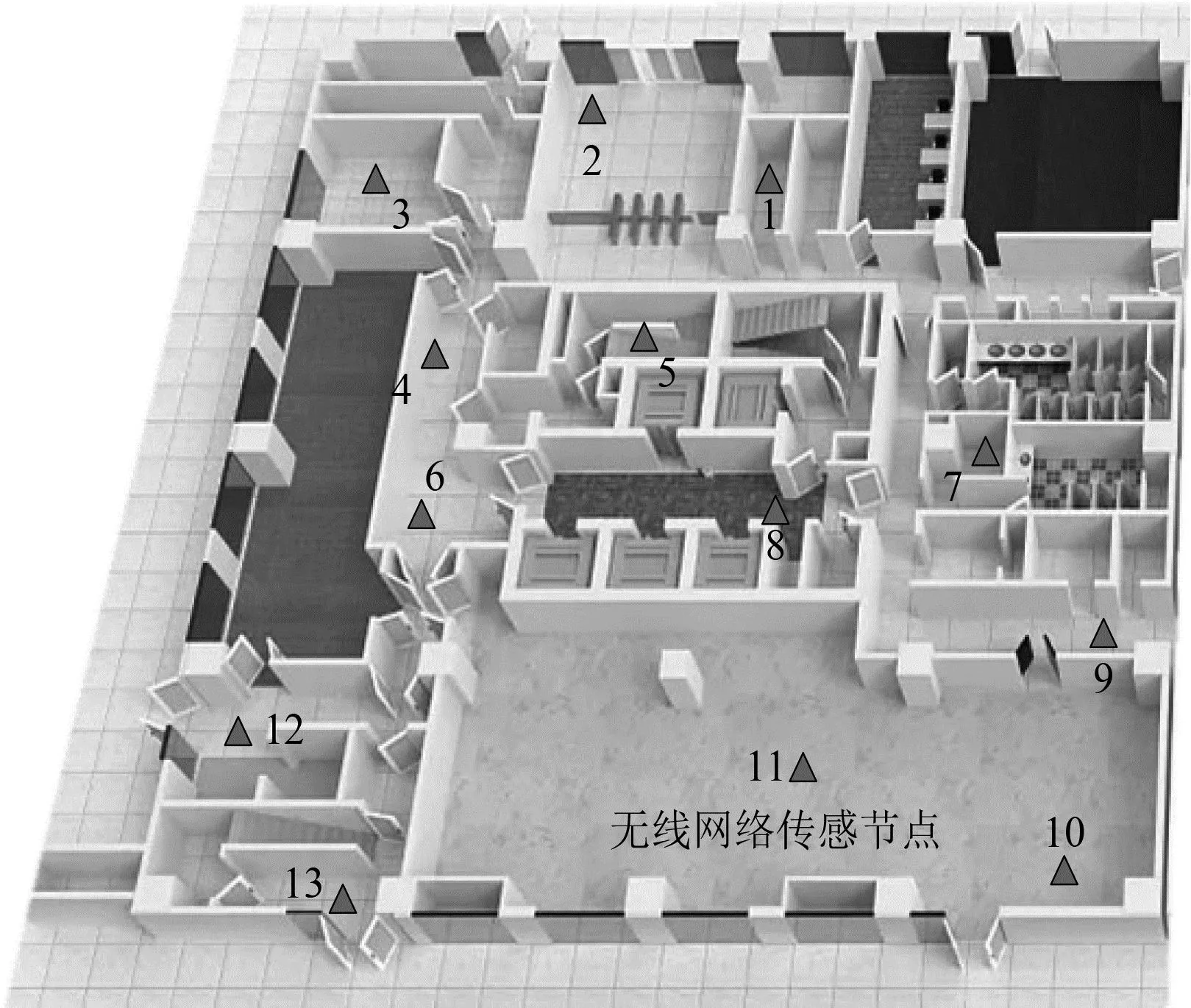
图3 公司办公区内无线传感网络节点分布示意图
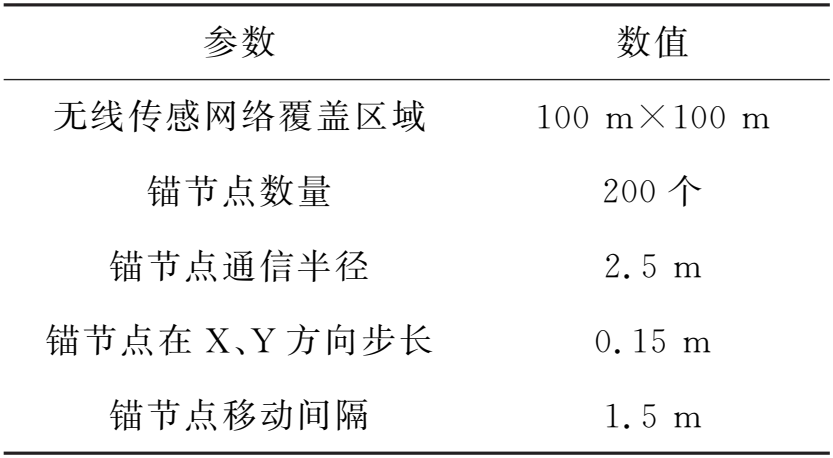
表1 无线传感网络环境参数
在MATLAB仿真软件内设置采集IOS平台在点对点通信时锚点频率为60 Hz。
基于上述MATLAB仿真软件设置,利用IOS平台进行点对点通信,使用本文方法对该IOS平台点对点通信时的目标进行自动定位,验证本文方法实际应用效果。
2.1 IOS平台点对点通信锚节点分布范围获取
在MATLAB仿真软件内,使用IOS平台进行10次点对点通信,使用本文方法获取该10次点对点通信时,无线传感网络内通信锚节点的分布范围,结果如表2所示。
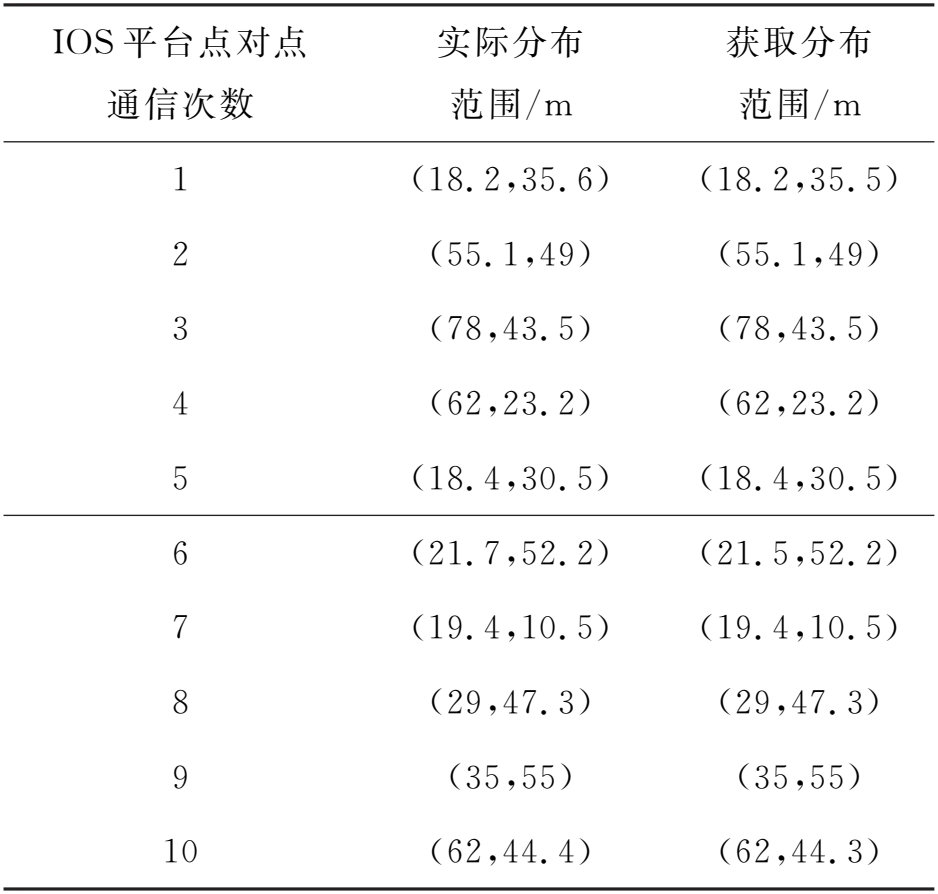
表2 IOS平台点对点通信锚节点分布范围获取测试结果
分析表2可知,本文方法在获取10次IOS平台点对点通信锚节点分布范围时,仅在第1次和第10次时,获取的分布范围在Y轴方向存在0.01 m的偏差,在第6次时,获取的分布范围在X轴上存在0.02 m的偏差,该偏差数值在100 m×100 m的无线传感网络覆盖区域内影响极小,因此当该偏差未超过0.5 m时,则可忽略不计。本文方法在其他IOS平台点对点通信次数时获取的通信锚节点分布范围均与其实际分布范围吻合。上述结果说明:本文方法获取IOS平台点对点通信锚节点分布范围较为准确,也从侧面说明本文方法对IOS平台点对点通信时目标自动定位效果较好。
2.2 点对点通信目标移动区域路径获取测试
以某个IOS平台点对点通信目标锚节点作为实验对象,使用本文方法获取该锚节点移动区域路径,利用MATLAB仿真软件以图的形式呈现实验结果,如图4所示。
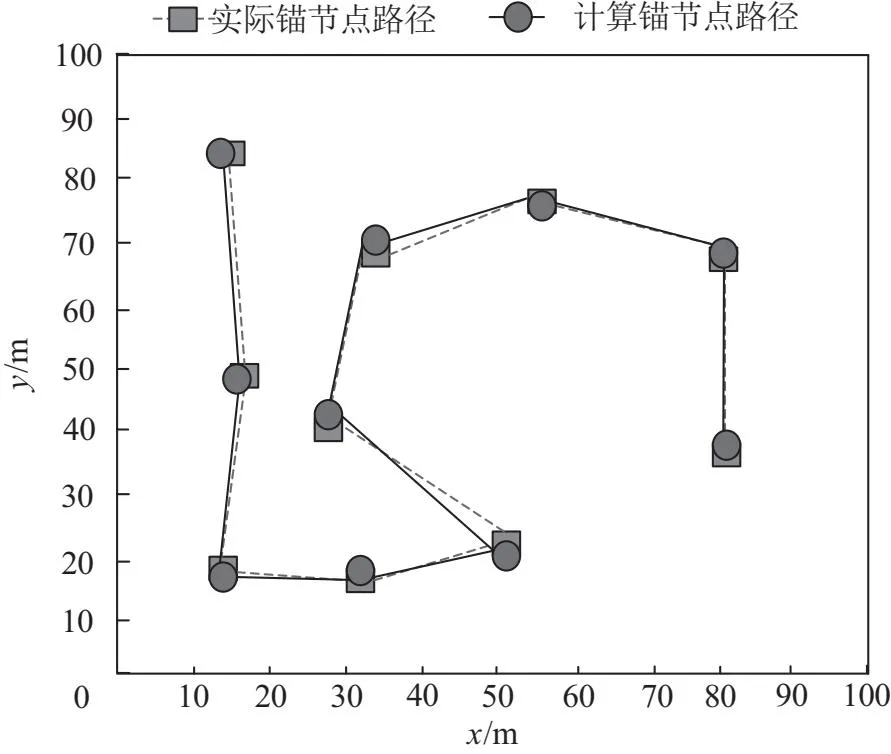
图4 点对点通信目标移动区域路径获取测试结果
分析图4可知,使用本文方法获取IOS平台点对点通信目标锚节点的移动区域路径与其实际锚节点移动路径重合度较高。仅在纵坐标为21 m左右和纵坐标为70 m左右时,本文方法获取的IOS平台点对点通信目标锚节点移动区域路径位置与实际锚节点出现偏差,但偏差数值略小。在其余锚节点位置处,本文方法得到计算的锚节点路径与实际锚节点路径均相同。上述结果说明:本文方法计算IOS平台点对点通信目标移动区域路径较为准确。
2.3 通信目标自动定位测试
利用ISO平台向13个无线网络传感节点进行点对点通信,使用本文方法对该13点对点通信目标进行定位,定位结果如图5所示。

图5 点对点通信目标进行定位结果
分析图5可知,本文方法对IOS平台的点对点通信目标进行定位时,其定位结果与实际无线网络传感节点完全重合。该结果说明:本文方法可有效定位IOS平台的点对点通信目标,且定位精度较高,具备良好的应用效果。
3 结论
本文研究基于室内LBS技术的IOS平台点对点通信目标自动定位仿真方法,在该方法中应用到了LBS技术内的三边测量法,依据IOS平台点对点通信时的目标点和锚节点的位置,使用三边测量法得到目标点的位置坐标,使其具备较佳的应用效果。虽然从目前来看本文方法取得了一定成果,但其依然存在缺陷,如本文方法并未考虑室内无线传感网络锚节点分布过于密集,目标点周围存在不共线锚节点过多时,对目标锚节点定位运算过于繁琐,影响IOS平台点对点通信目标自动定位效率,因此未来需在上述角度对本文方法加以改进。