目标与态势三维可视化系统设计与实现
2024-01-10刘永海肖雅娟
杨 垚,刘永海,肖雅娟,卞 泊
(解放军92020部队,山东 青岛 266000)
0 引言
态势是指战场空间中兵力分布和战场环境的当前状态及发展变化趋势的总称[1]。设计并实现一个实用高效的态势可视化系统十分必要。目前,对态势可视化的研究主要集中在态势实时监控[2-3]和态势回放[4-5]两方面。李帅等[6]实现了基于 Qt 的目标态势的实时显示系统,伍宗卿等[7-8]实现了基于Web的实时态势显示系统,但上述三者仅侧重于态势实时监控,无法提供态势回溯功能。吴蕾等[9-12]实现了模拟演习中的战场态势回放系统,但态势数据都存于本地磁盘,无法满足海量态势回放需求;张明杰等[13]实现了一个包含态势实时显示和态势回放两个功能的系统,但并未有效利用多源态势数据且态势展示方式单调;孟凡跃等[14]提出了态势回放多形式显示方法,但态势显示效率不高。
在实际应用中,随着态势持续时间和目标数量的持续增加,会产生海量的态势数据,需要使用大数据存储技术对其进行存储[15-16];同时,海量态势数据中包含了多源异构数据,需要对这些数据进行挖掘和利用来提升态势展示效果[17];并且态势回放过程中,通常需要查看目标的基本信息和能力覆盖范围,而现有态势展示系统无法满足上述三个需求。
针对以上问题,本文设计并实现了一个目标与态势三维可视化系统,包含实时态势监控、历史态势回放和目标三维可视化等功能。该系统实时接收和处理海量态势数据,并对多源异构态势数据进行数据融合,然后将其存储至列数据库中,最后基于GIS技术将目标与态势进行三维可视化展示。
1 关键技术研究
1.1 数据处理
随着物联网技术的飞速发展,可获取的态势信息呈爆炸式增长,如何对海量多源异构态势数据进行有效处理和融合是态势可视化的关键技术之一。本节从数据清洗、数据插值、数据融合等方面对原始态势信息进行处理。
1.1.1 数据清洗
本文采取一系列数据清洗规则对从传感器设备、雷达设备和船舶自动识别系统(Automatic Identification System,AIS)获取的数据进行处理,主要是过滤重复和异常数据。以AIS数据为例,处理策略如下:
(1)删除唯一标识码、时间戳、经度、纬度为空值的数据。
(2)删除唯一标识相同且时间戳一样的重复数据。
(3)删除经度、纬度、航速和航向超出表1范围的异常数据。

表1 AIS数据中部分数据项的有效取值范围
1.1.2 数据插值
数据清洗会过滤掉一些重复和异常的航迹数据,并且传感器设备上报数据周期并不规律,导致实际得到航迹数据的时间间隔并不固定,可能会出现很长时间间隔中没有航迹数据,为了提升态势显示效果,需要采用数据插值方法进行处理。另外,在某时刻发生突发事件,需要在航迹点上进行标注,但在这一时刻并不一定存在真实的航迹点,因此也需要通过插值来添加航迹点。
关于航迹点的插值方法有很多种,例如:线性插值、三次样条插值。鉴于航迹数据实时性要求高且体量大,本文在兼顾效率和性能等因素的考虑下,采用结合航向和航速的插值方法[18]。假设在航迹点A(t1,x1,y1,v1,θ1)和B(t2,x2,y2,v2,θ2)之间插入一个新点,根据A点和B点的信息,可以分别计算出待插入点的一个预测值,如式(1)和式(2)所示:
(1)
(2)
其中,v和θ分别为A、B两点的航速和航向,ti为待插入点时间戳。然后对(xi1,yi1)和(xi2,yi2)进行加权平均得到插入点坐标,权重通过ti、t1和t2之间的时间差进行计算。即:
(3)
其中,W1和W2为A、B两点的权重。最终得到的预测值为:
(4)
1.1.3 数据融合
如图1所示,雷达和AIS数据既有冗余又可互补,因此将其进行融合能够提高态势数据可靠性和展示维度。根据雷达和AIS数据各自特点,对二者进行数据融合一般可分为四个步骤:坐标转换、时间同步、航迹关联和航迹融合。
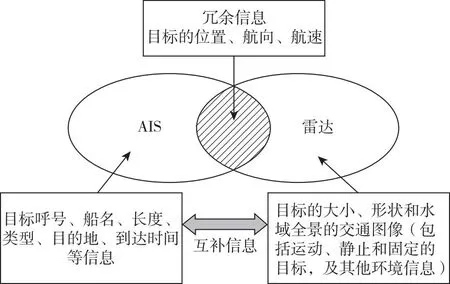
图1 雷达和AIS数据冗余互补图
(1)坐标转换。考虑到转换的效率和精度,本文将雷达和AIS获取目标的航迹信息转换到直角坐标系中。雷达获取的目标位置是以雷达为原点的距离和方位角,可以采用极坐标进行转换,具体转换方法如下:
(5)
式中,(x,y)为雷达中心的经纬度坐标,R,θ分别为雷达测得的目标距离和方位角。而AIS数据是以经纬度来表示目标的位置信息,采用的是将 WGS-84 坐标系根据墨卡托投影方法将其转换到直角坐标系。
(2)时间同步。雷达数据的更新周期为2~4 s,而AIS数据更新时间不固定,没有周期性,因此,以雷达数据的时间为基准,对AIS数据进行插值操作来保证二者时间同步。插值算法采用1.1.2节中提出的结合航向和航速的插值方法。
(3)航迹关联。在数据融合之前,需要判断雷达和AIS获取数据是否为同一个目标,本文综合考虑距离、航速和航向等因素,采用多因素综合关联规则[19]。假设在某段时间内获得N个雷达和N个AIS航迹点,(pi,vi,θi)表示第i个点的位置、航速和航向,(α1,α2,α3)表示距离、航速和航向3个因素的权重系数,通过式(6)~(8)分别计算上述3个因素的关联程度:
(6)
(7)
(8)
M=α1P+α2V+α3θ
(9)
式中,M表示最终加权后的关联度,若M小于预设的阈值,则认为雷达和AIS获取的这两段航迹是关联的。
(4)航迹融合。面对海量的雷达和AIS数据,为提高数据处理速度,应选择简单高效、易于实现的航迹融合算法。基于以上考虑,本文使用加权平均融合算法[20]对雷达和AIS数据进行融合,具体公式如下:
(10)
式中,X表示融合后的数据,Xr,Xa分别表示雷达和AIS中需要融合的位置、航速和航向数据,Wr,Wa分别表示雷达和AIS的融合权重。权重大小与设备的观测误差σ2有关,观测误差越小,权重越大。根据最小均方误差原则,可得到Wr,Wa的最优解为:
(11)
1.2 数据查询
面对海量历史态势数据,如果一次性全部获取,不仅获取时间长而且容易造成内存溢出问题。本文基于分布式列数据库设计了一种快速获取态势回放所需数据方法,具体如下:
(1)查询满足条件目标的最旧态势记录和最新态势记录,得到回放时间轴;
(2)采用按时间间隔分批获取数据方式,查询开始时间和时间间隔之间的目标态势记录;
(3)前端根据获取的态势记录显示态势信息;
(4)若当前回放时间离上次获取数据时间小于时间间隔,将开始时间设置为开始时间与时间间隔之和,重复执行步骤(2),直至开始时间大于回放结束时间。
如果用户在态势回放过程中设置倍速或快进,将重新设置开始时间和时间间隔,保证正常获取回放数据。
1.3 数据可视化
1.3.1 目标可视化
该系统基于Web和GIS服务对目标的图标、基本信息、能力等进行可视化展示。目标通常可分为静态目标(如港口、机场、雷达站等)和动态目标(如汽车、舰船、飞机等)。静态目标由于数量较多,考虑到显示效率,一般使用小图标表示;而动态目标需要在三维地图上进行移动,为提升空间显示效果,可使用三维小模型表示,但如果动态目标数量太多,考虑系统显示效率,也应使用小图标表示。具体图标示例如图2所示。目标的基本信息一般包括目标的图片、文本描述、相关文本资料和音视频等,这些信息通过前端页面弹框的形式来展示。目标能力是指搭载某些装备而具有的侦察预警、防空反导等能力,为直观立体显示能力覆盖范围,本文通过增加能力图层方式显示三维能力包络。
1.3.2 态势实时显示
无论是日常态势监控还是大规模演练都需要实时接收大量态势数据,设计快速、稳定的态势数据获取方法是态势实时显示的关键。现有态势实时显示系统首次获取态势数据效率都不高,本系统在内存数据库中存储最新的态势信息,能够快速获取最新态势并显示。同时,利用WebSocket技术与后端建立长连接,当后台接收到新的态势数据时,实时推送给前端展示,保证了态势显示的实时性和稳定性。
1.3.3 态势回放显示
态势回放是将目标的历史航迹、行为、事件等多维数据进行回放展示。系统获取历史态势数据时采用1.2节中提出的分批获取数据方式,使得目标态势可以快速上显,缩短系统等待时间。在回放过程中,系统支持设置回放倍速和快进操作,也支持点击目标模型图标查看目标基础信息和展示目标三维能力包络,并且目标三维能力包络可跟随航迹变化而动态移动。同时,当回放至异常告警或突发事件时,系统会自动弹出信息框,提醒用户进行重点回看。
在此基础上,系统设计了3种态势回放方式,即全景回放、概略回放和事件回放。全景回放是将某一时间段内的全部目标的所有态势信息按照时间顺序逐一回放,有利于清晰完整地呈现全目标态势。概略回放是从关系数据库中获取态势航迹中的关键点来呈现目标的迁徙路径。事件回放是将事件发生前后的时间段内与事件相关的目标进行回放显示,方便用户进行事件分析。
2 系统结构设计
系统整体结构包括感知设备层、数据采集处理层、多级数据存储层、支撑服务层、综合展现层。系统结构设计图如图3所示。
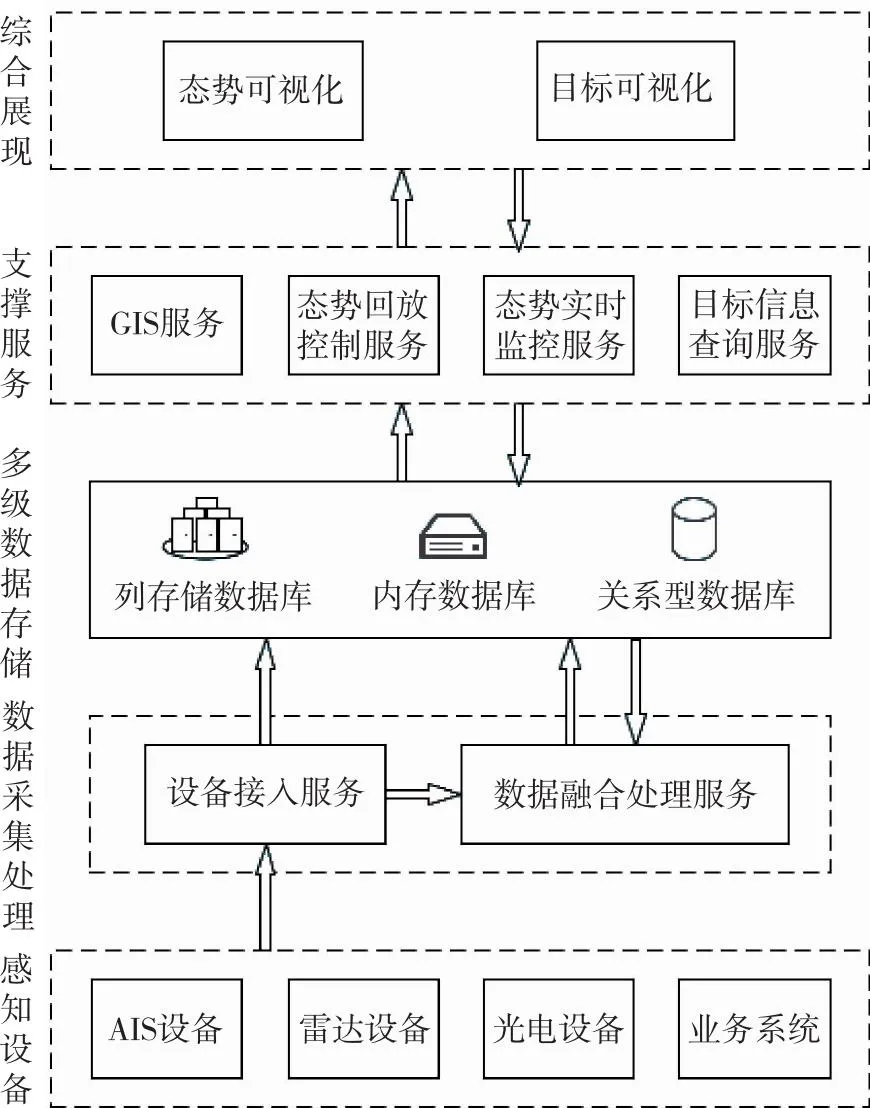
图3 系统结构设计图
(1)感知设备层。感知设备层包含了产生态势数据的多类传感设备和提供目标基础数据的业务系统。该层为目标与态势可视化提供原始数据,并通过各类传输协议发送至设备接入服务。
(2)数据采集处理层。设备接入服务支持多协议、多类型的数据实时采集与处理,采用多线程编程框架来提升服务并发能力。同时,该服务兼容HTTP、TCP和UDP等数据传输方式以支持各类传感器设备和业务系统的数据接入。对于设备数据解析协议多样的问题,该服务采用协议适配、协议解析技术从原始数据包中提取实际数据。
数据融合处理服务是对设备接入服务中解析出的原始数据进行清洗过滤、插值、关联、融合等操作。数据清洗是将原始数据中的重复值和异常值进行过滤;数据插值用于补充突发事件航迹点和不同设备间航迹的时间校对;数据关联用于判断不同设备获取的航迹是否为同一目标;数据融合是将不同设备获取的同一目标的信息进行融合,有利于提升态势展示维度和效果。
(3)多级数据存储层。根据实际业务需求,该层设计了三种数据存储模式来存储不同类型数据。一是将目标基础信息、重要态势数据、异常告警、突发事件等数据存储于关系型数据库MySQl。其中重要态势数据是对融合后的态势在时间和航向两个维度进行了筛选过滤,例如,在每个固定时间间隔并且航向变化超过特定阈值时进行一次数据存储。二是使用内存数据库Redis存储查询频率高、访问时延低的业务数据,如目标名称和唯一标识对应关系、目标最新一条态势数据等。内存数据库查询速度快、并发性高,可以提升整体系统的吞吐能力和业务数据加载效率。三是使用支持大数据、分布式的列数据库Hbase存储海量历史态势数据。列数据库具有高并发写入、大数据实时查询等优势,能够满足海量态势数据实时处理和查询要求。
(4)支撑服务层。支撑服务层包含GIS服务、态势回放控制服务、态势实时监控服务和目标信息查询服务。GIS服务提供了三维地理空间可视化平台,能够综合呈现目标的位置、方向、速度、轨迹、基础信息和特殊能力等信息。态势回放控制服务基于不同回放方式、回放条件和控制信息分别从列数据库和关系数据库获取历史态势数据,保证了态势回放效率和稳定性。态势实时监控服务提供目标最新的态势数据,当客户端首次请求数据时,该服务从内存数据库中获取系统最新的态势数据,通过与客户端建立长连接的方式,向客户端实时推送态势数据。目标信息查询服务为目标可视化提供基础数据支持。
(5)综合展现层。综合展现层基于浏览器实现态势可视化和目标可视化。
3 系统实现
系统采用B/S(浏览器/服务器)模式作为基础架构。浏览器端基于Vue3.0框架和UI控件Ant-design来构建可视化界面;采用Cesium三维地图框架实现图层、模型、目标能力及态势航迹的渲染和绘制。服务器端基于Spring Boot框架实现态势回放控制服务、态势实时监控服务和目标信息查询服务;通过发布离线瓦片地图服务为浏览器端提供基础地图数据。接入服务基于Go语言框架开发,利用其协程特性提升服务的并发能力;数据融合处理服务采用Flink流处理技术对数据进行实时处理。
目前,该系统已经实现,并且应用于大型模拟对抗训练中。系统运行部分截图如图4所示。该图是对舰船和飞机的模拟数据进行了全景态势回放,与一般的态势回放系统不同,该系统增加了态势与目标的联合显示。首先,图中展示了部分机场、港口等静态目标,同时可根据实际需求勾选展示更多静态目标;其次,将舰船、飞机等动态目标的特殊能力进行三维可视化展示,并且随态势变化而移动,能够清晰直观地显示动态目标的雷达探测范围、火力打击范围等重要信息。图5所示为目标能力三维可视化效果图,其中(a)为舰船能力三维可视化图,(b)为飞机能力三维可视化图。表2给出了不同目标数量下态势实时监控和态势回放的系统平均响应时间,从表中结果可以看出,该系统在目标数量较多时仍能保持较快的响应时间。
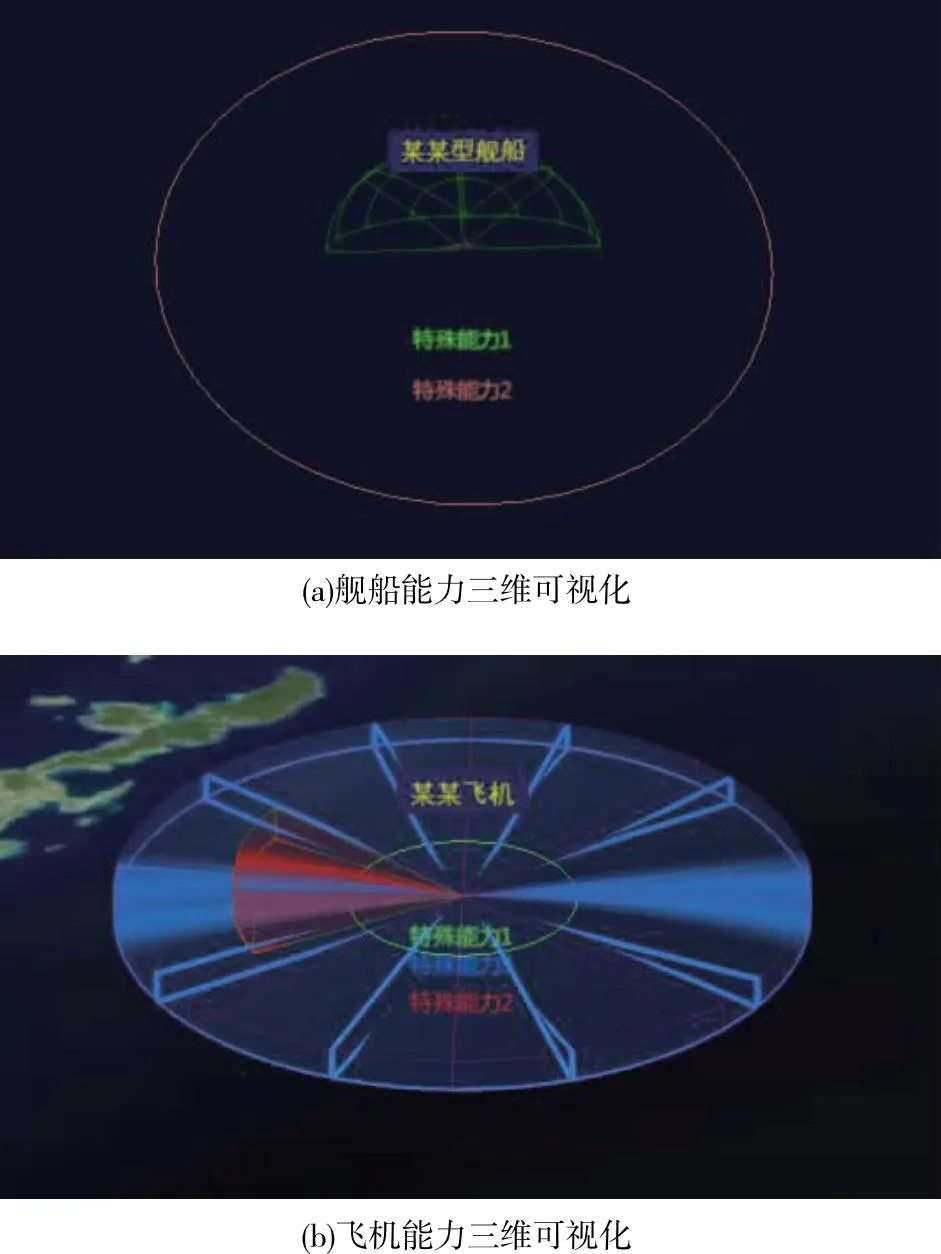
图5 目标能力三维可视化效果

表2 不同目标数量下系统平均响应时间(s)
4 结论
本文设计并实现了一个目标与态势三维可视化系统,首先讨论了数据清洗、数据插值、数据融合、数据查询等关键技术,接着通过系统结构分析,明确了系统的层次结构及各层之间的相互关系,最后从图标、基本信息和特殊能力三个维度对目标进行可视化,从实时态势监控和历史态势回放两种方式对态势进行展示,并且实现了态势与目标的联动展示。在实际应用中,该系统响应速度快、显示内容丰富,对大型模拟对抗演习中目标与态势的展示分析起到重要支撑作用。