蔬菜穴盘苗自动取苗机构研究进展
2024-01-10何义川韩绿化王士国董云成刘向新
刘 洋,何义川 ,韩绿化,李 斌,王士国,董云成,刘向新
(1.新疆维吾尔自治区教育厅普通高等学校现代农业工程重点实验室,新疆 阿拉尔,843300;2.新疆农垦科学院机械装备研究所;3.塔里木大学机械电气化工程学院;4.江苏大学现代农业装备与技术教育部重点实验室)
蔬菜穴盘苗育苗移栽可以避开春季灾害性天气,延长生育期,提高产量和品质,在农业生产中得到应用。机械化移栽蔬菜穴盘苗时,半自动移栽机可以降低劳动强度,但只做到了省力不省工,移栽效率并没有显著提高[1],而自动移栽机可显著提高移栽效率,减少用工。国外移栽机自动化程度较高,但是与我国的蔬菜种植模式、育苗农艺不相符,我国在移栽机取苗机构、取苗末端执行器的结构上进行了大量研究。本文对相关研究进行综述,对我国典型地区的蔬菜移栽机使用现状进行介绍,分析我国蔬菜穴盘苗自动移栽机取苗装置存在的不足,并对未来开展取苗装置研究提供思路。
1 自动取苗机构研究现状
自动取苗机构是自动移栽机的核心部件,按照取苗方式的不同,可以分为夹针式取苗、夹茎式取苗、顶出式取苗和顶出-夹取式取苗。
1.1 夹针式取苗
夹针式取苗爪较为先进的有荷兰飞梭公司研制的PC-21型温室穴盘苗自动移栽机,可以实现穴盘苗从高密度盘向低密度盘移栽(图1)。该机包含气力驱动取苗爪、自动分苗机构和穴盘输送装置,整排8个4针结构取苗爪可以实现12 000~16 800株/h穴盘苗的移栽,移栽效率非常高。日本有多家企业研制了夹针式蔬菜穴盘苗移栽机,如洋马PF2R型自动移栽机,取苗爪为两根片状的夹针,取苗爪由滑槽控制取投苗运动,用一个凸轮控制夹针的张合,该机的移栽速度约45株/min(图2)。

图1 PC-21型自动移栽机

图2 洋马PF2R型自动移栽机
我国学者对夹针式取苗机构做了大量研究。俞高红等[2]设计了非圆齿轮旋转式取苗机构;叶秉良等[3]设计了偏心齿轮-非圆齿轮行星系取苗机构;赵雄等[4]设计了二阶非圆齿轮行星系取苗机构;崔巍等[5]设计的二阶椭圆行星轮系取苗机构,采用Visual Basic可视化平台、三维运动仿真软件优化了结构参数。这些取苗机构借鉴了插秧机的工作原理,但是蔬菜穴盘苗与水稻秧苗的生长结构特点不一样,导致取苗效率和取苗成功率不高。
李华等[6]研制了基于行星齿轮-滑道组合的夹取式取苗结构,根据取苗机构轨迹曲线模型求解得到机构的初始参数,并以取苗爪夹针长度、夹针开度、取苗速度为试验因素开展试验,得出在夹针长度为198 mm,开度为19 mm,取苗频率为57株/min时,取苗成功率为94.38%(图3)。胡建平等[7]根据穴盘和投苗杯的位置规划取苗路径,设计了门形摆动整排取投苗机构,取苗爪为2指4针结构,整机采用电气控制驱动。试验表明,增大移栽速度,取苗成功率降低;128孔穴盘培育的黄瓜苗取苗成功率低于72孔穴盘,主要原因是取苗爪在夹取128孔穴盘苗后容易脱落。谢守勇等[8]设计了一种四杆机构的取苗机构,用2根片状的取苗爪斜插入苗钵进行取苗,通过实验得出苗盘倾斜角度为45°时,取投苗效果最佳。

图3 行星齿轮-连杆组合取苗机构
在取苗爪结构优化方面,王跃勇等[9]以取苗爪形状、苗钵含水率和苗根系效果为因素进行夹苗试验。结果表明,取苗爪的形状和苗钵含水率对取苗完整率影响显著,U形取苗爪、苗钵含水率50%时苗钵完整率最高。童俊华等[10]以夹针的夹持角、夹针数量、苗钵含水率和穴盘苗长势为试验因素,夹紧力为优化目标进行单因素试验。结果表明,当夹持角度为7°、四针、苗钵含水率为84%、长势中等以上时,夹针夹取苗钵可以得到稳定上升的夹紧力。以上两个研究在取苗爪的结构设计方面具有参考价值,但是他们的试验都是在速度较慢的情况下夹取,而实际上取苗爪是在较快的速度情况下插入并夹取苗钵。
高国华、胡建平等[11-12]设计了斜入式和两指四针结构、两针结构的取苗爪,以夹取角度、夹针开度、夹针插入苗钵深度、苗钵含水率等为试验因素,通过台架试验和三维模型测试了夹取力和脱盘力,并通过取苗试验测试了取苗成功率和苗钵破损率,得到较优的试验因素组合。通过以上研究可以发现,夹针取苗爪夹取苗钵时苗钵易发生破碎是导致取苗失败的主要因素,但苗钵破损是从苗钵内部发生的,由于无法弄清苗钵内部的破裂如何发生,导致即使优化了取苗爪的结构和夹取参数,却始终不能从根本上解决苗钵破损问题。
1.2 夹茎式取苗
谢守勇等[13]用贴有橡胶垫片的探头对辣椒苗茎进行力学压缩试验,得出茎秆抗压力-变形曲线近似呈线性关系。为保证茎秆夹取时不受损伤,应夹取苗茎高度为16 mm的位置,橡胶垫片之间的夹紧距离为0.51 mm,此时苗茎的抗压力为8.74 N。李华等[14]提出了斜夹直拔夹茎式取苗方法,基于二阶椭圆齿轮行星轮系与凸轮摆杆机构设计了一种夹茎式取苗机构,取苗爪呈片状。试验表明,取苗频率为80株/min时,取苗成功率为92%。张静等[15]设计了一种移盘、取投苗、分苗、输送苗都为机械驱动的整排取投苗机构,整排夹茎取苗爪靠凸轮机构驱动取投苗。该取苗机构结构非常复杂,试验表明,取苗速度由64株/min增大到88株/min时,取投成功率由89.84%降到81.25%。
夹茎式取苗爪存在的主要问题是,穴盘苗枝叶缠绕,取苗时取苗爪易将领近穴孔钵苗一同带离,造成投苗空穴的现象。特别是对采用1穴2株的穴盘苗,这增大了相邻穴孔连带夹苗现象的发生。连带夹苗和夹伤苗茎是夹茎取苗需要解决的技术难题。
1.3 顶出式取苗
意大利Checchimagli公司研制了顶出取苗方式的自动移栽机,用一排顶杆将硬质泡沫穴盘中的穴盘苗顶出到柔性转动的苗盒中,每个苗盒内装载一株苗,苗盒转动到投苗位置,然后逐个将苗投落到栽植机构中。该机的自动化程度很高,主要是针对裸地移栽(图4)。王超等[16]针对组合式穴盘,设计了一种气动下压自动取苗机构,用顶苗器将穴盘苗从组合式穴盘中向下挤压出穴盘,掉落到导苗管中。这种组合式穴盘目前使用较少。

图4 意大利自动移栽机和硬质穴盘
张敏等[17]对一种曲柄滑道连杆式顶苗机构进行了研究,该机构由顶苗机构整排水平顶出穴盘苗,靠穴盘苗自身重力转换为直立方向落至落苗板,不需配置推苗机构,整机结果简单。尹大庆等[18]设计了一种杠杆顶出式有序分苗机构,采用连续送苗与杠杆快出顶出的方式进行取苗作业,顶出的玉米钵苗落入到导苗管中。顶出苗后靠苗自由落体进行移栽的机构,抛出后的钵苗存在翻滚、落苗轨迹不可控、落苗位置一致性差的问题。
为了解决上述问题,文永双等[19]结合顶出式和插入夹持式取苗的特点,设计了一种插入顶出式取苗装置(图5),取苗时用一排顶杆将穴盘苗从苗钵中顶出,梳理板对顶出的穴盘苗导向,防止发生偏转,然后穴盘苗落入带有苗格的输送带上。用72孔穴盘培育的蔬菜穴盘苗进行取苗试验表明,苗钵含水率为60%,取苗速度为120株/min时,取苗合格率为97.22%。同时指出,穴孔过密的穴盘育苗,穴盘苗茎叶展幅较大的苗和苗之间交叉缠绕,茎叶与梳理板发生摩擦,对取苗性能有影响。
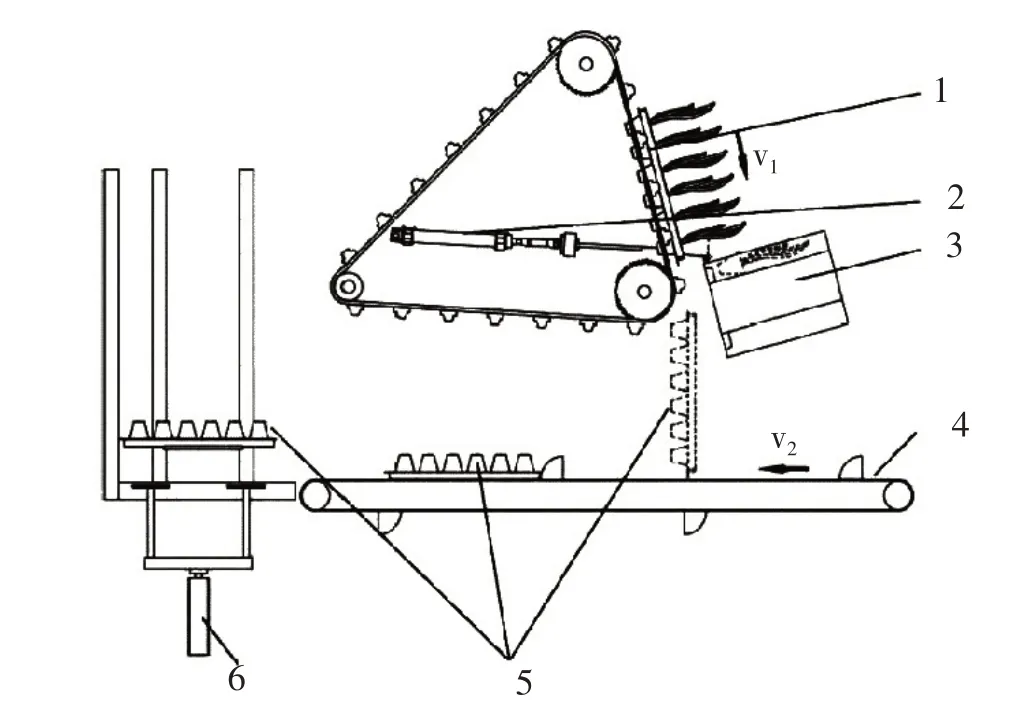
图5 顶出式取苗装置
1.4 顶出-夹取式取苗
顶出-夹取式取苗可以分为顶出-夹钵式和顶出-夹茎式。
国外顶出-夹钵式移栽机最具代表的是意大利Ferrari公司生产的FUTURA型全自动移栽机,用整排顶杆将泡沫穴盘中的苗顶出后,用片状的取苗爪从苗钵两侧夹取,然后投放到柔性连续转动的苗盒中,配置有监测装置用于查看空苗盒并进行补苗,电气化和自动化水平很高(图6)。

图6 FUTURA自动移栽机
王蒙蒙等[20]设计了一种曲柄摆杆式夹苗机构,该机构采用逐个取苗的方法将穴盘苗从穴孔中取出,V形取苗爪由复位弹簧提供夹紧力,可以根据苗钵的含水率、苗钵的宽度尺寸调节弹簧的夹紧力和取苗爪的开度。刘大庆等[21]研究了一种基于顶出机构与旋转式取苗机构配合工作的顶取苗机构,工作时先由顶杆将穴盘苗顶出,取苗爪靠近穴盘时顶杆将苗钵顶入取苗爪,取苗爪夹紧苗钵移动到投苗位置,由取苗爪上的推苗杆将苗钵推离取苗爪。
胡建平等[22]设计了一种顶夹拔组合的取苗装置,气缸从穴盘底部将苗钵顶出,同时夹针式取苗爪垂直穴盘上方夹取苗钵,然后气缸驱动取苗爪摆动到投苗位置,向柔性转动的投苗盒投苗。用72孔穴盘培育的黄瓜穴盘苗进行取苗试验,当顶杆顶入位移为15 mm、夹针插入苗钵深度为35 mm,插入取苗速度为225 mm/s时,取苗成功率94.12%,苗钵完整率94.12%,但是该试验未说明取苗速度。
韩绿化等[23]设计了一种气吹式穴盘苗钵体松脱装置,用直线模组移位单元和双联气缸升降单位组合输送系统,驱动气嘴从穴盘底部的穴孔排水口逐排顶吹穴盘苗钵体,实现穴盘苗钵体与穴孔壁之间非机械接触式放松(图7)。对128孔穴盘培育的黄瓜苗进行气吹松脱试验结果表明,当气嘴回路中气流喷射压力控制为0.2 MPa,钵体含水率为55%~60%,黄瓜苗龄为25 d,穴盘苗顶吹作用达到既能将穴盘苗钵体顶松脱离穴孔壁粘附,又最大程度保证钵体完整度的效果。
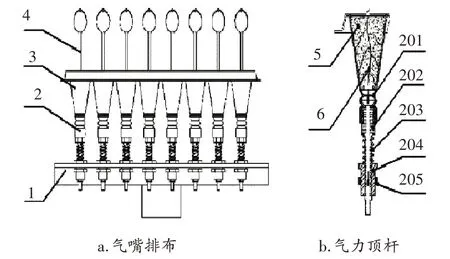
图7 气吹式穴盘苗钵体松脱装置结构示意图
在顶取-夹茎取苗研究方面,陈斌等[24]设计了一种曲柄摇杆附加直线气缸的对置穴盘交替自动取投苗机构,采用两排取苗爪分别取两盘穴盘苗,然后由曲柄摇杆将取苗爪移动到分苗装置并投苗(图8)。在取苗爪取苗时,采用顶苗杆先从苗盘底部顶苗钵,使苗钵与穴盘孔脱离,然后用片状的取苗爪夹取苗茎。取苗实验表明,取苗频率从70株/min增大到120株/min时,取投苗成功率由96%下降到42%。

图8 对置穴盘交替自动取投苗机构结构示意图
2 典型地区蔬菜穴盘苗移栽现状
新疆是我国加工番茄、工业辣椒种植面积最大的区域,种植面积分别为40.49 khm2和74.09 khm2,目前已经普遍采用育苗移栽技术[25]。新疆加工番茄和工业辣椒都是采用128穴盘育苗,加工番茄采用1穴1株,工业辣椒根据品种不同,线椒、铁皮椒是1穴1株,板椒是1穴2株。由于气候不同,新疆的北疆地区在每年的3月初进行育苗,4月底5月初进行移栽。成品苗株高在12~20 cm,根系可以将育苗基质包裹住,取苗时苗钵散坨现象较少。
使用的移栽机械有半自动移栽机和全自动移栽机。半自动移栽机都是吊杯式结构,可以进行膜上成穴栽苗,并配置膜面穴口覆土机构。为了提高半自动移栽机的作业效率,降低劳动强度,在吊杯式栽植机构上配置了多种形式的辅助喂苗机构(图9a)。目前使用较多的是重庆北卡农业科技有限公司研制的2行移栽机,需要驾驶员、投苗人员、辅助用工共6 人,一台半自动移栽机移栽效率约0.4~0.53 hm2/d,而人工移栽效率约0.067 hm2/d·人。新疆巴州良佳公司研制的一种自动移栽机,采用夹取苗茎整排取苗,将辣椒苗投落到转动的投苗杯中,整机采用机械驱动,由凸轮控制夹苗气缸的动作(图9b)。该机需要驾驶员、检查补苗人员、辅助用工共4人,移栽效率并没有比半自动移栽机显著提高,只是降低了人工取投苗的劳动强度,且夹苗爪在夹取苗茎时容易伤苗,导致该自动移栽机在新疆并没有普遍使用。

图9 新疆应用的移栽机
目前新疆加工番茄和工业辣椒移栽作业,人工、半自动移栽机和全自动移栽机三种使用情况都存在。移栽技术的落后,降低了加工番茄和工业辣椒种植的经济效益,严重制约了新疆加工番茄和工业辣椒产业的发展。
3 蔬菜穴盘苗自动移栽发展分析
3.1 蔬菜穴盘苗自动移栽的现实基础
(1)移栽种植模式和技术水平多样。我国地域辽阔,裸地移栽、铺膜移栽和温室大棚移栽方式多样,起垄、平地、窄行株距等移栽模式众多且规格不一。移栽前土地整备条件、蔬菜穴盘苗育苗质量差异较大。这些因素给自动移栽带来了很大的难度。
(2)育苗穴盘尺寸不一。穴盘的规格从72穴到288穴不等;相同规格的穴盘,穴盘的长宽相等,但是穴孔的尺寸和底部的漏水孔存在误差;穴盘边缘有翻边加强,不适合弯曲变形。这些都给机械取苗带来较大的难度。
(3)移栽效率低。目前使用的半自动和全自动移栽机的移栽效率都低于80株/min·行,虽然高于人工移栽,但是机械移栽需要配备辅助用工。机械移栽的使用成本高,导致农户使用机械移栽的愿望不高[26]。
3.2 蔬菜穴盘苗自动移栽技术发展展望
(1)与宜机化改造深度融合。对与机械移栽相配套的深松、起垄、铺膜机械进行改进,提供移栽专用整地机械,提高移栽前土地的耕整地水平,为自动移栽提供良好的作业环境,这是提高移栽质量和效率的必要条件。
(2)控制育苗穴盘质量,育苗标准化。提高穴盘的生产质量,穴盘在外形、穴孔尺寸和穴盘塑料厚度等方面保持一致。采用机械装填育苗基质和播种,严格调控温室育苗的水、肥、光、热,注重穴盘苗根系发育,使培育的蔬菜穴盘苗易于取苗。
(3)自动取苗装置智能化。通过对自动取苗机构引进智能控制系统及作业监控,促进取苗技术与机械化、自动化和信息化相融合,进一步提高取苗装置的易操作性和智能化,使取苗机构的成功率和速度相适应,减少辅助用工。
