基于数学偏微分算法的水稻插秧机控制系统优化
2024-01-09李宁
李 宁
(郑州升达经贸管理学院,郑州 451191)
0 引言
随着农业装备与应用技术的不断创新,我国的插秧水平逐步呈现飞速发展的态势。智能化、精准化的插秧机具可以大大减少人工插秧成本,还可以提升插秧作业效率。近年来,我国业内专家学者不断致力于插秧机的功能实现与结构设计研究,在覆膜功能、秧深控制、施肥功能等研究方面均有很大进展,但从实践作业调研显示数据来看,水稻插秧机在作业过程控制方面还需进一步提升。与此同时,数学领域的偏微分方程及多阶算法已越来越多地被应用至机械结构的现代化控制设计中。为此,基于当前的研究基础,以数学偏微分控制算法为基点,针对水稻插秧机的控制系统展开优化探究。
1 水稻插秧机概述
一台完整的水稻插秧机通常由传动装置进行动作指令输入,送秧机构、分秧结构、插植机构等相继开始动作,各机构由整机中心控制装置驱动,需要考虑水稻插秧机整机的结构部件分配及水稻图像提取、秧苗秧距、秧苗秧深等关键参数的监测精准性。传统的控制算法较为粗放,故以控制算法进一步提升为目标,选择适用性强的VP型高速水稻插秧机为优化对象展开研究。所研究的插秧机采用HMT变速方式,由插植部和控制部两大部分组成,其核心参数配置如表1所示。
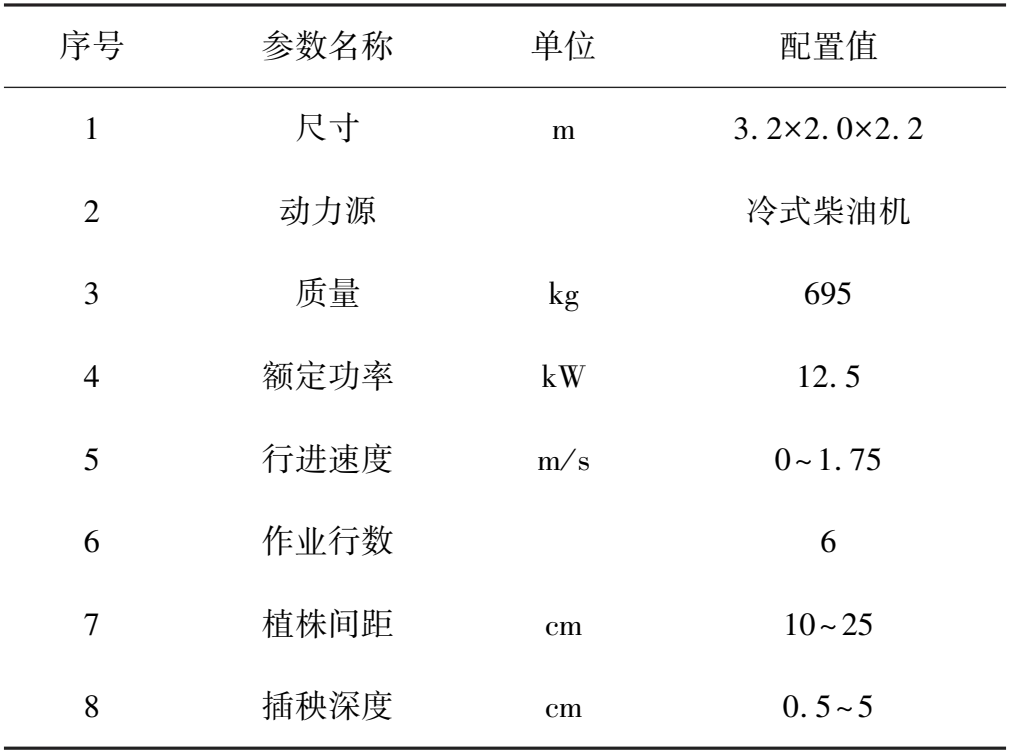
表1 VP型水稻插秧机核心参数配置列表
2 数学偏微分应用
2.1 搭建模型
首先,进行偏微分方程应用下的数学模型搭建分析。考虑偏微分方程具有模糊边界控制处理与图像特殊部位准确处理的计算优势,从插秧机理的信息获取与信息传递的角度出发,选择关键项的参数(如图像、位姿、插秧深度等)进行控制输入,建立偏微分模型为
(1)
式中u—偏微分控制参数,如图像等;
φ—模型的正实数函数集合;
Δu—偏微分控制参数梯度;
u0—偏控制模型参数初始值;
t—偏微分控制的虚拟时间变量参数;
x、y—偏微分控制参数执行坐标。
同时,对上述偏微分控制匹配相应的三级通信加权邻接算法,实现一定精度及速度的收敛,以确保插秧作业过程中各参数反馈调控的一致性功能要求;进一步,以数学偏微分算法模型为基点,给出插秧机系统优化功能实现简图,如图1所示。将整体分解为结构子系统与控制子系统,从力学传递、运动传递与控制传动3个层面进行插秧机作业精度改善。其中,控制子系统采用系统控制优化方法,结构子系统采用核心部件改进方法,实现插秧作业过程的振动性能及各组件的传动效率等优化。
2.2 系统控制优化
插秧信号获取方面,运用背景与目标相区别的视觉处理算法,针对重点的边缘、节点进行偏微分程序导入,还需保证计算的精度与速度;插秧信号传递方面,实现SAE系列的通信协议,并基于插秧实践特点,考虑速度的波动影响,引入改进型的PID算法,考虑推杆长度及伸缩特性,实施非线性的微分计算控制,以确保参数的实时调整。

图1 数学偏微分模型的插秧机系统优化功能实现简图Fig.1 Diagram of optimization function realization of the transplanter system based on the mathematical partial differential model
针对插秧信号执行方面,以电驱动控制为主导,给出数学偏微分控制的系统参数监测电路设计简图,如图2所示。以偏微分处理的信号模块为中心,将插秧系统的电源电压设为起点,重点监测频率,并经信号转换形成可识别的电压信号,传送至系统的控制参数采集仪;将中心模块的参数与先前的控制传感器监测参数进行内部互通,做出最终的系统调控指令,进而指导整机插秧精准化作业执行。
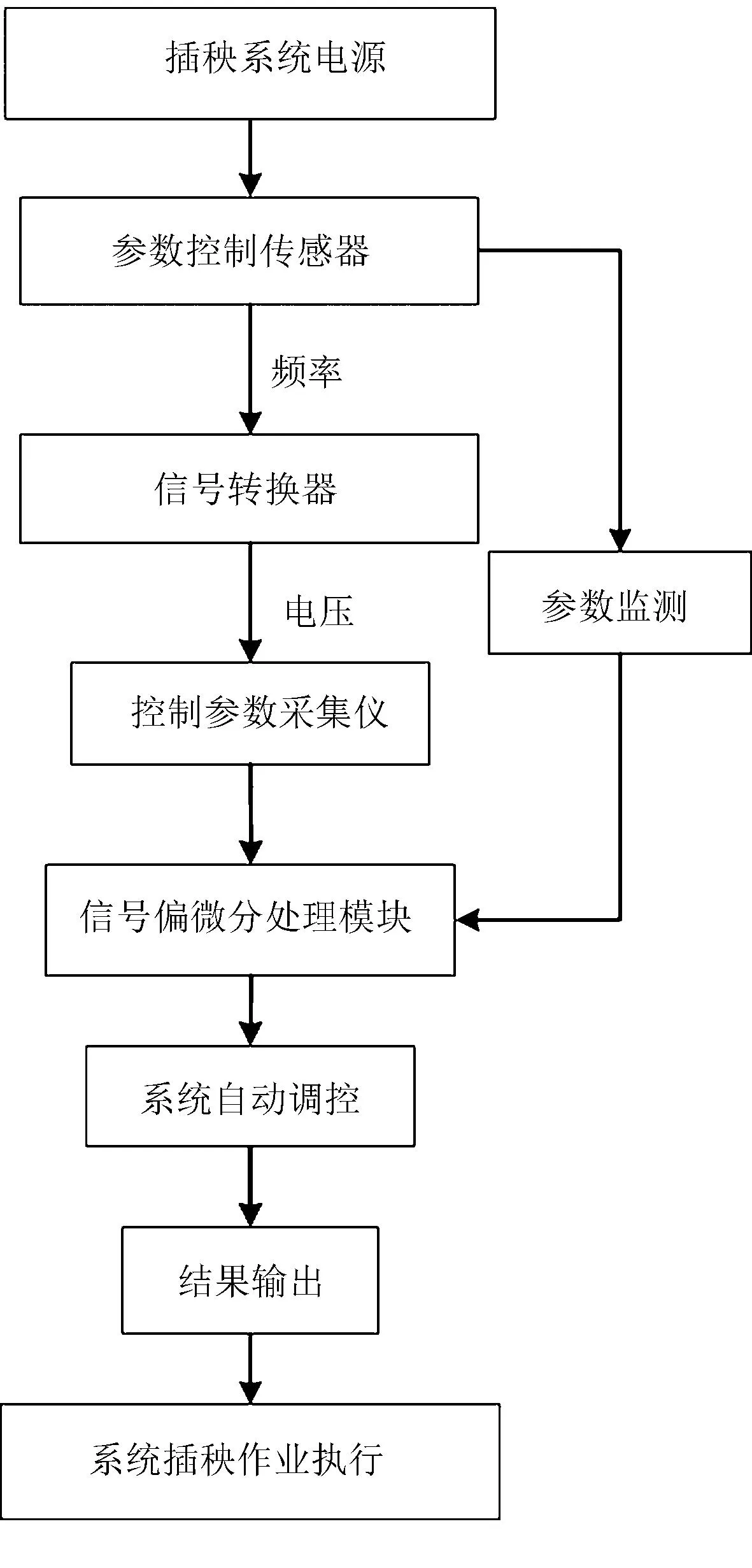
图2 数学偏微分控制的系统参数监测电路设计简图Fig.2 Design diagram of the system parameter monitoring circuit of mathematical partial differential control
2.3 整机部件改进
将插秧信息采集的装置进行改进,增设视觉功能强大的图像采集装置,此处给出数学偏微分应用的水稻插秧机控制系统采集模块参数选型,如表2所示。采用成熟的Windows运行系统,将帧频与分辨率等核心控制参数设置为高段位,以确保插过程数据处理的及时性,从而使插秧部的机构位姿获取更为精准。
水稻插秧机在行进插秧过程中,以行进速度与插秧速度之间的内在关系为改善基点,增设偏微分控制部件;选取加速度计与接近开关,注重结构与控制的协同关系,以实现插秧的作业精度目标。考虑部件的运动角速度关系及承受的应力应变关系,设计水稻插秧机控制系统的执行装置,其连接原理如图3所示。将偏微分控制部件增设在整机操作杆与推杆电机之间,实现控制参数的微调功能。其中,操作杆动作分解为上升、停止、下降、插秧等挡位,再经AD转换装置将指令送至插秧作业控制器端,后续进行插秧的准确作业。

表2 偏微分应用的水稻插秧机控制系统采集模块参数选型
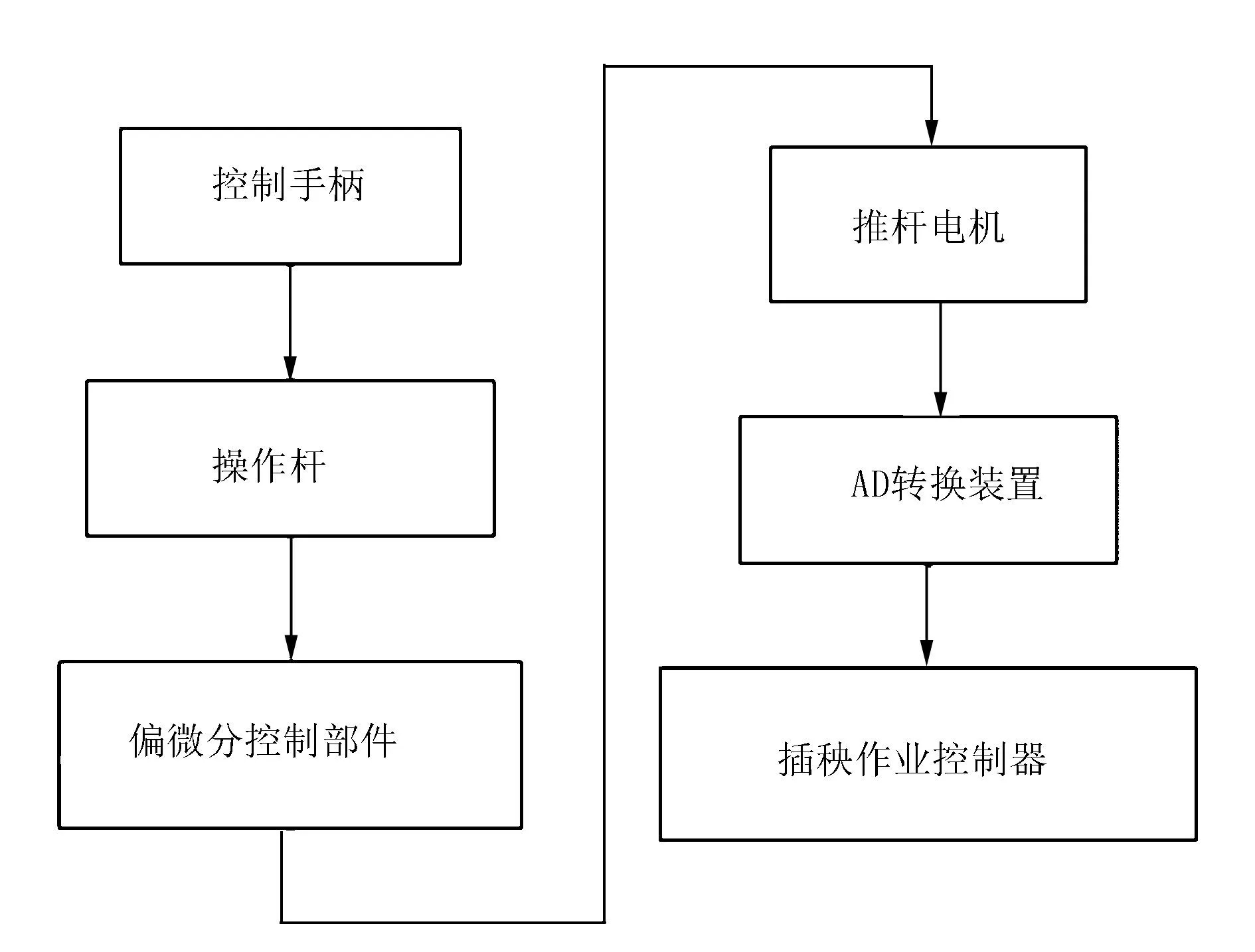
图3 插秧机控制系统的执行装置连接原理框图Fig.3 Block diagram of the connection principle of the actuator of the rice transplanter control system
3 整机作业试验
3.1 作业条件
基于上述偏微分控制优化下的水稻插秧机整机改善方案,选择300m×1800m的试验田,进行插秧作业性能验证。从基于偏微分应用的整机作业试验场景(见图4)可以看出,重点关注整机在插秧过程中的计算机监控、状态检测及图像采集模块等。
核心作业条件设置如下:
1) 系统进行插秧作业路径规划的一致性,确保评价条件相同;
2) 系统各结构组件动作顺畅,过程监测参数连续性,确保评价数据有效;
3) 插秧过程需满足插秧作业的各农艺参数要求,如避障、空载、转弯等。

1.计算机监控 2.插秧机作业状态检测 3.图像采集图4 基于偏微分应用的整机作业试验场景Fig.4 Test scenario of the whole machine operation based on the partial differential application
3.2 过程分析
以GB/T6243-2003《水稻插秧机试验方法》为标准,进行试验田的分块编码插秧对比,共记录6块田地,分别设置秧深为5.50、6.5、7.5mm进行参数对照;插秧作业完成后,应确保秧苗的直立状态,并输出原始监测参数,得到基于偏微分的各插秧试验分组的秧苗插植情况(深度)数据统计,如表3所示。由表3可以看出:秧深为5.50mm时,系统的执行偏差分别为2.73%和2.36%;秧深为6.50mm时,系统的执行偏差分别为-1.85%和2.92%;秧深为7.50mm时,系统的执行偏差分别为3.47%和2.53%。综合来看,实际得到的插秧深度偏差范围为[-1.50,+4.00],满足插秧深度小于6mm的参数要求。
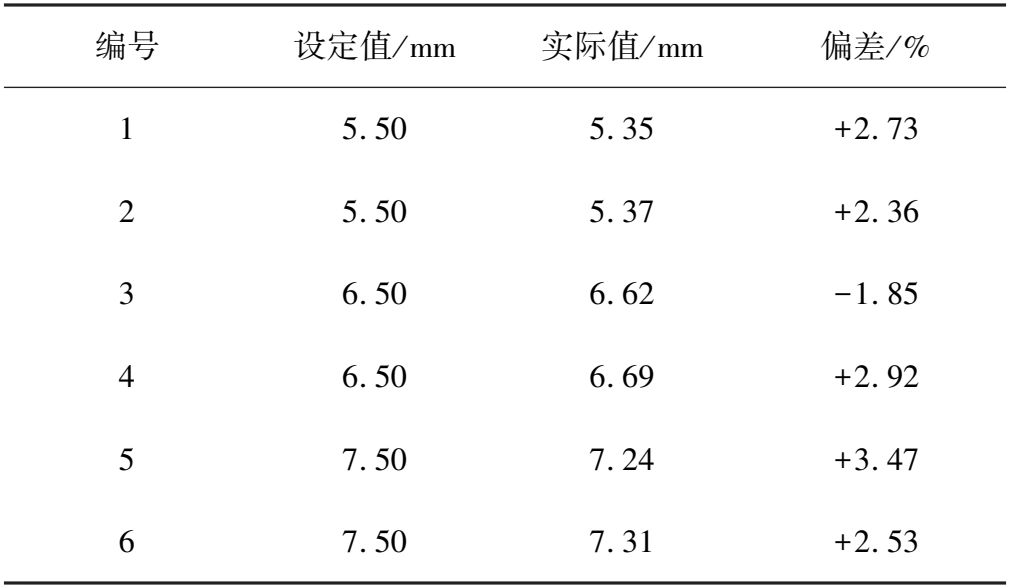
表3 各插秧试验分组的秧苗插植情况(深度)数据统计
进一步考虑整机插秧各表征参数对于系统综合效率的影响,基于数学偏微分控制模型,选取插秧系统的秧深精度、系统稳定度、秧苗损失率、插秧合格率及整机综合作业效率作为主要性能评价参数,得到基于偏微分控制的水稻插秧机系统优化性能对比,如表4所示。由表4可知:秧深精度可由87.50%提升为95.10%,系统稳定度可同步由89.20%提升至93.54%;经换算的秧苗损失率由0.68%降低至0.45%,损失率大大降低,且满足农艺设计要求;结合漂秧、翻倒、漏插等参数,插秧合格率由83.50%提升至92.08%,整机综合作业效率由84.79%提升至91.12%,验证了系统优化的正确性与可行性。

表4 基于偏微分控制的水稻插秧机系统优化性能对比列表
4 结论
1) 以水稻插秧机的作用机理为基础,通过搭建偏微分数学控制算法模型,针对系统进行控制设计与部件配置优化,实现完整升级型的水稻插秧机整机控制性能提升。实地插秧作业开展优化验证,结果表明:基于偏微分应用的整机秧苗损失率得到有效降低,插秧合格率得到明显提升,达到了预期的设计目标与插秧性能改善效果。
2) 此数学偏微分算法应用下的插秧系统优化思维,基于微分的内部精准求解模型展开,具有科学指导价值与实践研究意义,是农机装备不断更新的重要途径之一,将其与信息化手段相融合是设计发展的趋势。
