GPS技术在大块水稻田土壤养分检测中的应用
2024-01-09齐晓旭王国永
齐晓旭,王国永
(河北石油职业技术大学,河北 承德 067000)
0 引言
土壤养分是农作物生长过程中的重要供给源,对农作物的生长状态起决定性作用[1]。随着农业现代化技术的不断发展,农业生产规模也不断扩大,对于大面积稻田土壤养分状态监测成为农业生产过程的重要环节[2-3]。土壤养分是土壤信息的重要组成部分,通过获取土壤的养分分布空间和土壤养分变化过程,能够有效预测水稻生长过程对养分的需求,科学指导水稻种植过程中的灌溉和施肥环节。同时,连续性的土壤养分信息数据亦能够为农业生产过程预测和农业灾害评估提供科学依据[4-6]。
为了有效检测土壤养分信息,实现农业生产过程自动化和信息数据的实时采集处理与分析,基于GPS技术与嵌入式系统相结合的方式,设计了一种大面积水稻田土壤信息自动检测系统,旨在为农业生产过程智能化和实时性提供数据支持。
1 土壤养分检测系统设计
大面积水稻田土壤养分检测系统采用分布式控制方式,将整体系统功能划分为不同的功能单元模块[7],如图1所示。水稻田土壤养分检测系统以移动平台为载体,使用过程中进行平台的运动控制和土壤养分信息采集与数据分析处理[8-9]。检测系统平台运动控制主要包含平台的转向控制、前后运动控制以及速度控制,信息采集与数据处理系统包含土壤温湿度检测、养分检测以及GPS定位[10-11]。
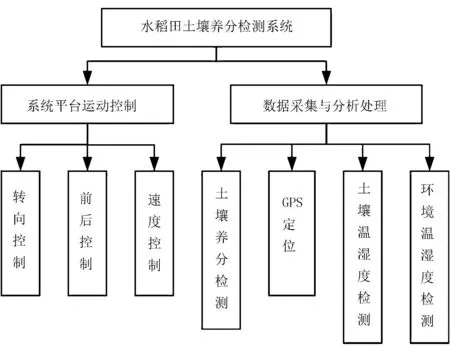
图1 水稻田土壤养分检测系统结构框图Fig.1 Structure diagram of soil nutrient detection system in rice field
水稻田土壤养分检测系统平台控制器用于对平台运动过程进行控制,同时对系统的信息数据进行处理与分析[12],如图2所示。工作时,控制器接受系统运行指令,执行相关的检测动作,并接收检测数据,对数据进行分析处理。
2 土壤养分检测平台系统硬件设计
水稻田土壤养分检测系统采用单片机作为系统控制板,以2560芯片为处理器核心,养分传感器模块上采用超声模块进行测距,使用限位开关控制传感器升降高度[13]。检测系统采用手持式GPS模块,通信方式为无线通讯,同时使用TN9红外土壤温湿度传感器和DHT22环境温湿度传感器[14]。图3为系统硬件结构框图。

图2 养分检测控制器系统框图Fig.2 System block diagram of nutrient detection controller
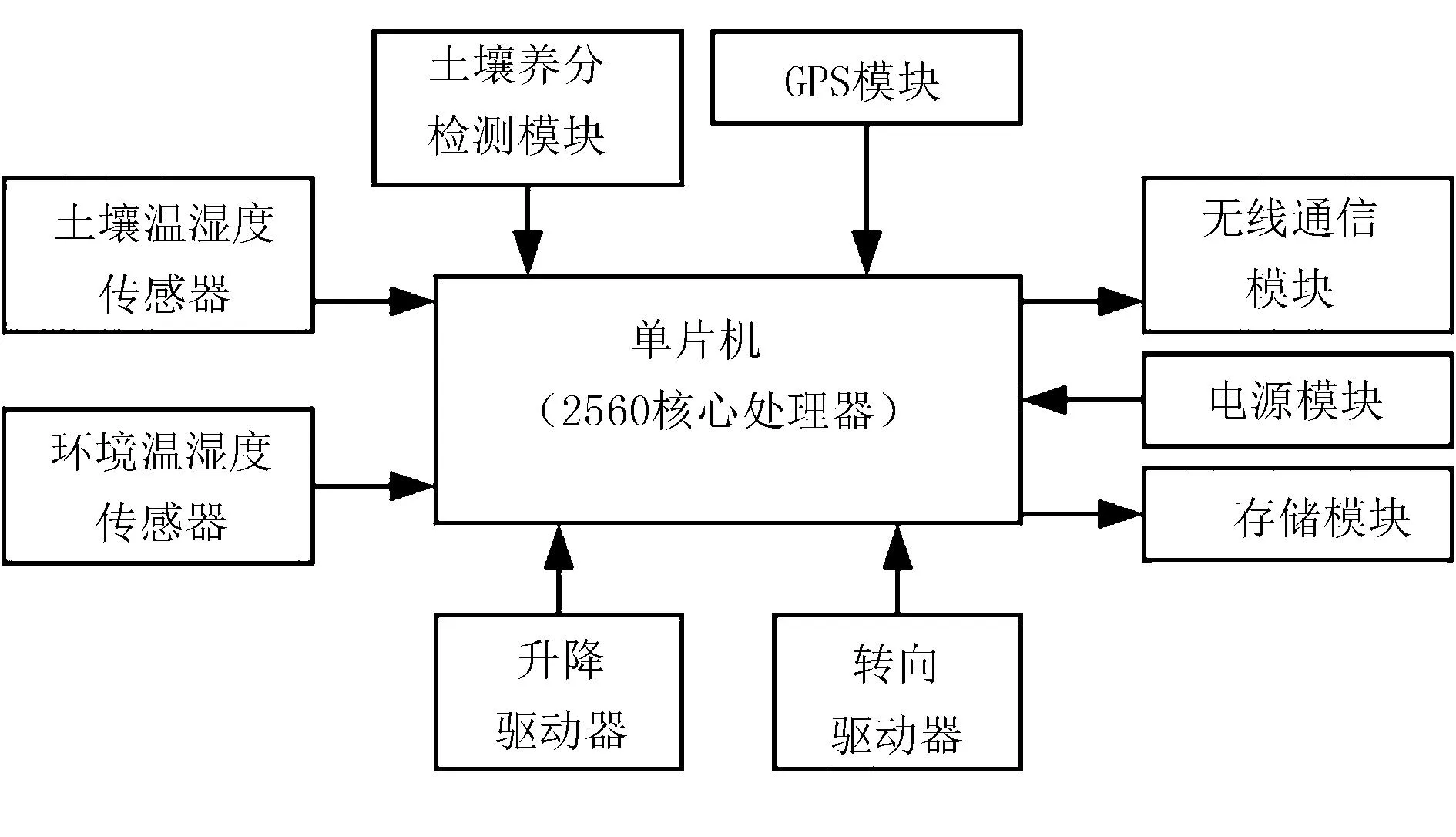
图3 系统硬件结构框图Fig.3 System hardware structure block diagram
检测系统中,土壤水分传感器选用频域测量技术的FDS-100型传感器,可准确进行土壤含水量测量,信号传输过程衰减小,具有超低温工作性能[15]。表1为土壤水分传感器技术参数。
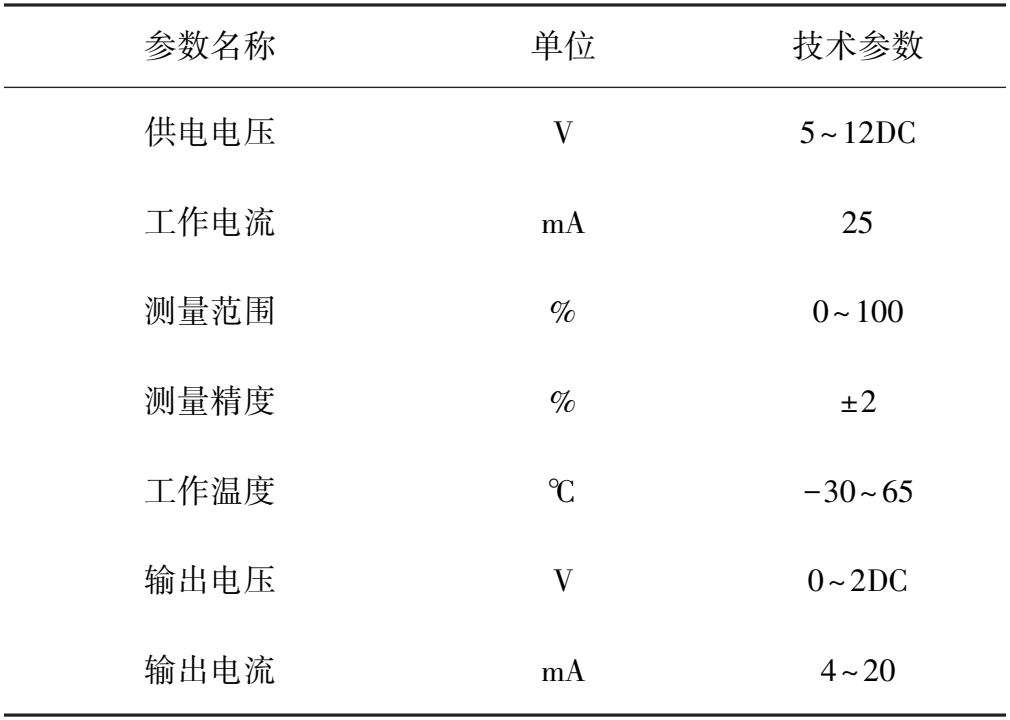
表1 土壤水分传感器技术参数
GPS信息采集模块采用TH型手持式GPS,能够在复杂环境中进行高精度定位与数据传输。表2为GPS技术参数。
选用TN9型红外土壤温湿度传感器进行土壤湿度和温度检测,传感器运行过程功耗低,采用热电堆准确进行温湿度检测,能够承受10℃的温度冲击。环境温湿度传感器采用DHT22型温湿度传感器,温度分辨率可达到0.1℃,量程范围为-20~60℃,传感器运行过程具有较高的稳定性和可靠性。

表2 GPS技术参数
水稻田土壤养分检测系统可将数据传输至系统上位机,也可以将检测数据直接存储于控制器SD卡中,运行过程保证系统数据的安全存储。系统显示器采用点阵式液晶显示器,对检测数据进行实时显示输出。
水稻田土壤养分检测系统电源要求具有较高的稳定性和抗干扰能力,能够为系统提供稳定可靠的电源。在此,选用4个12V蓄电池串联而成主电源,同时采用电压转化电路将48V电压转化为不同的电压,对传感器或系统平台进行供电。
3 土壤养分检测平台系统软件设计
水稻田土壤养分检测系统平台软件包含上位机软件与下位机软件。其中,上位机软件包含数据通信串口设置模块、无线数据通信模块、下位机初始化模块以及数据存储模块等;下位机模块包含主程序运行模块、系统参数初始化模块、通讯模块、数据采集模块以及显示模块等。
系统下位机软件主要用于对土壤养分检测过程进行控制,同时对检测数据进行采集、分析处理、显示以及上传等;系统上位机主要用于对各种数据进行保存与分析处理,同时对下位机参数进行发送与接收。所设计的水稻田土壤养分检测系统控制器主线流程如图4所示,水稻田土壤养分检测系统数据接收流程如图5所示。
水稻田土壤养分检测系统GPS模块用于对检测过程中的位置信息进行采集和记录,其信息数据提取流程如图6所示。
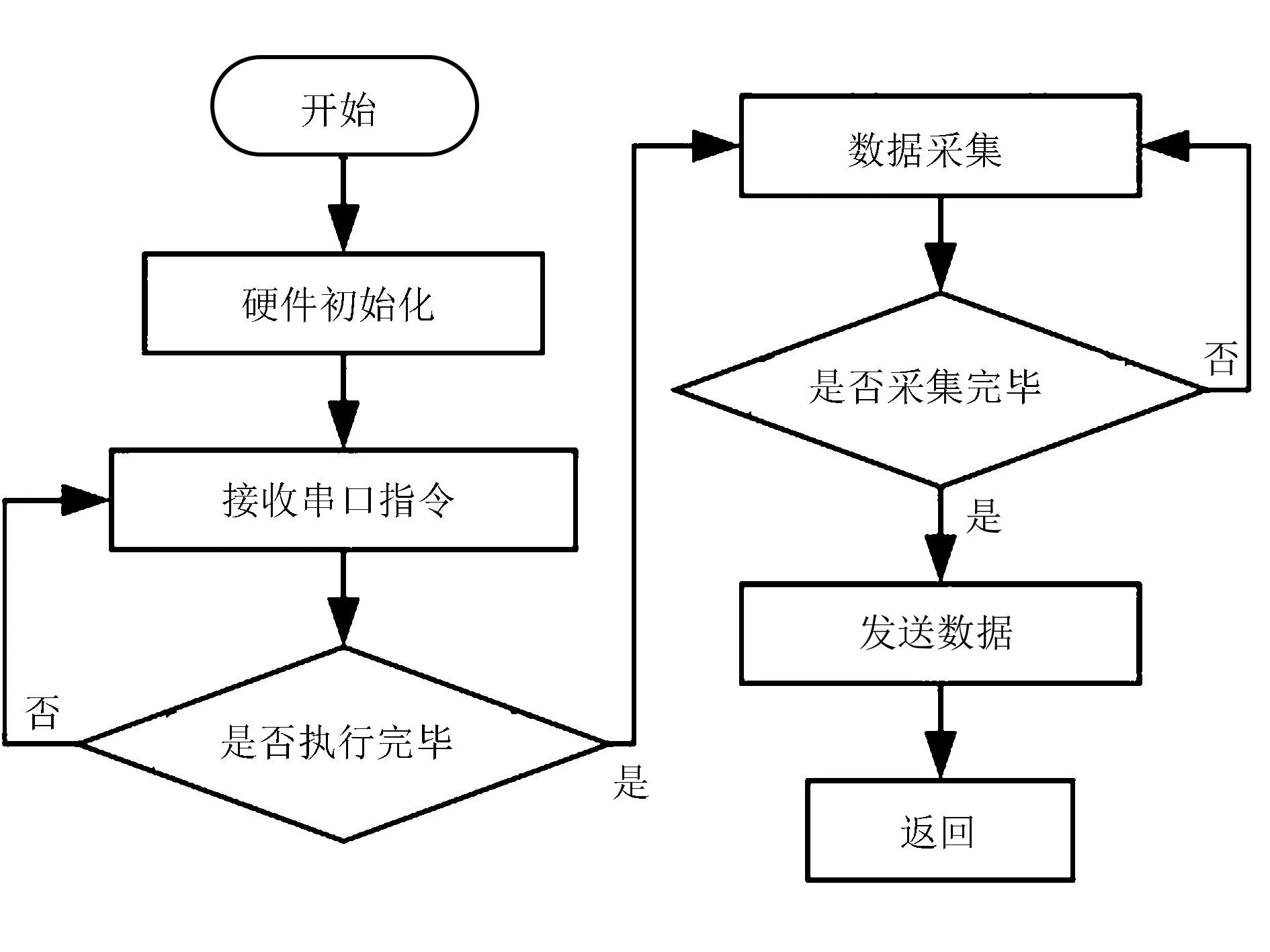
图4 水稻田土壤养分检测系统控制器主线流程Fig.4 Main flow of controller of soil nutrient detection system in rice field
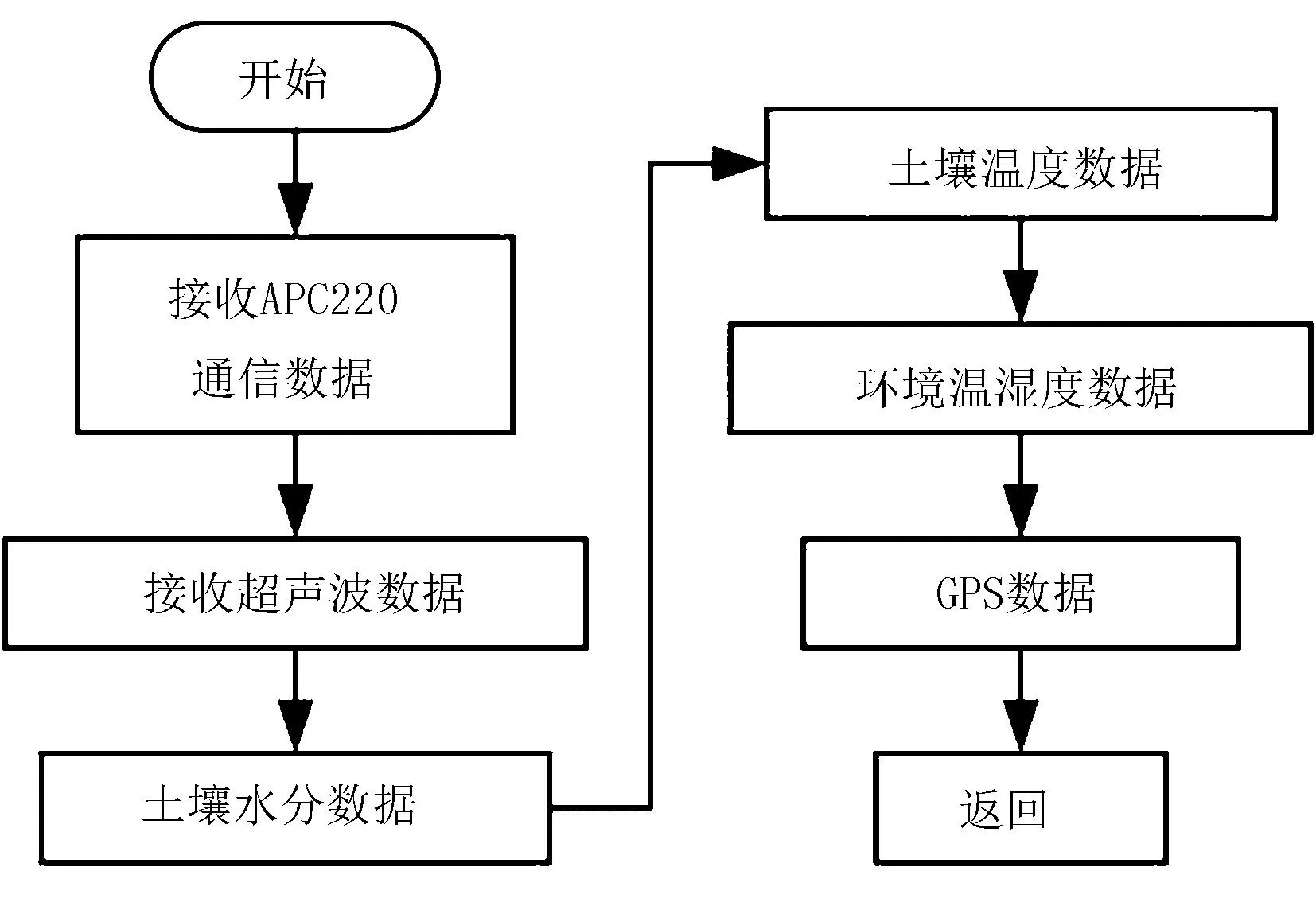
图5 养分检测系统数据接收流程图Fig.5 Data receiving flow chart of nutrient detection system
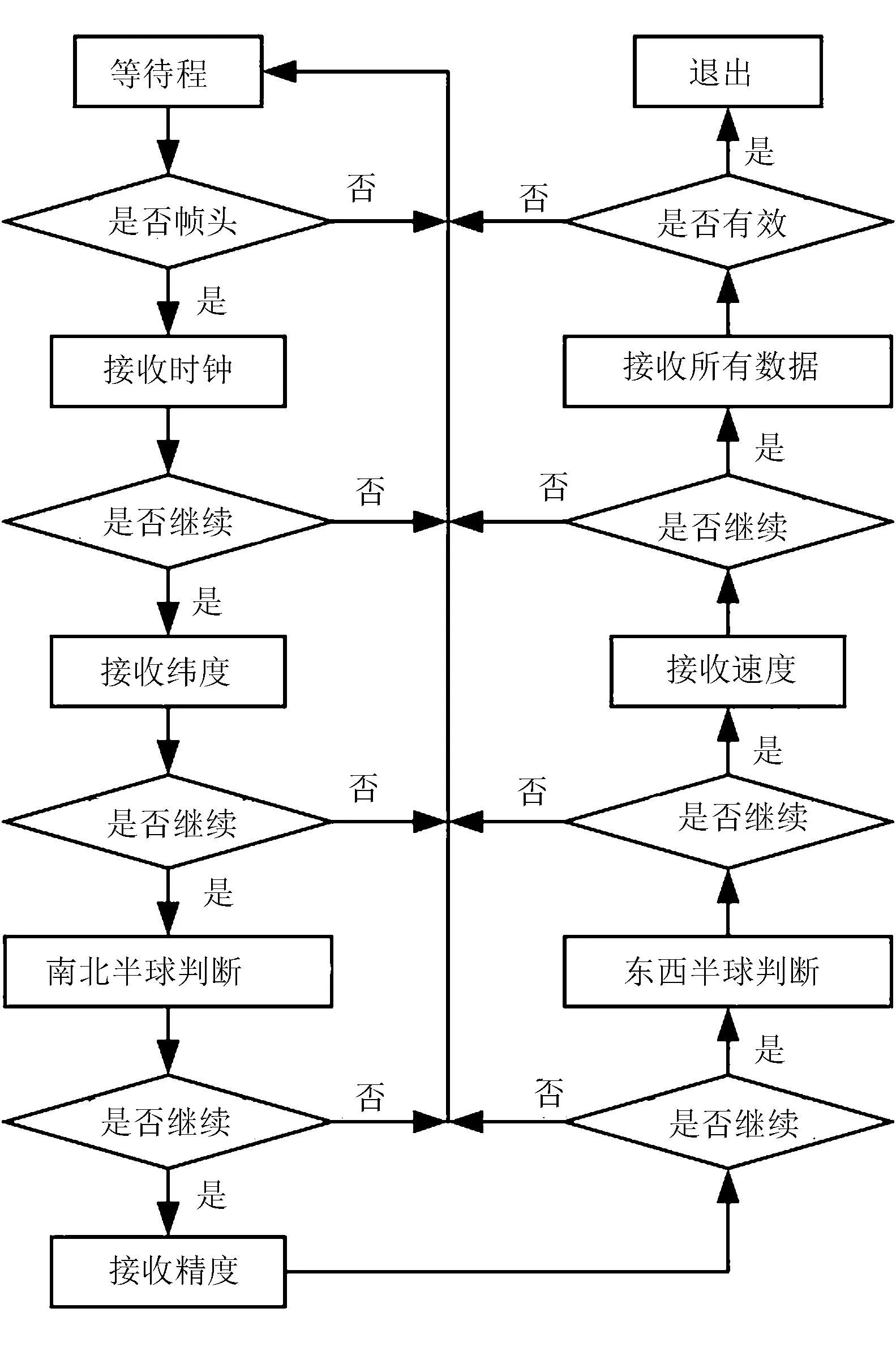
图6 GPS模块位置信息数据提取流程Fig.6 GPS module location information data extraction process
水稻田土壤养分检测系统上位机与下位机之间通过APC220进行数据通信,上位机接收到下位机信息数据后,进行分析处理、保存以及显示。图7为水稻田土壤养分检测系统上位机工作流程图。
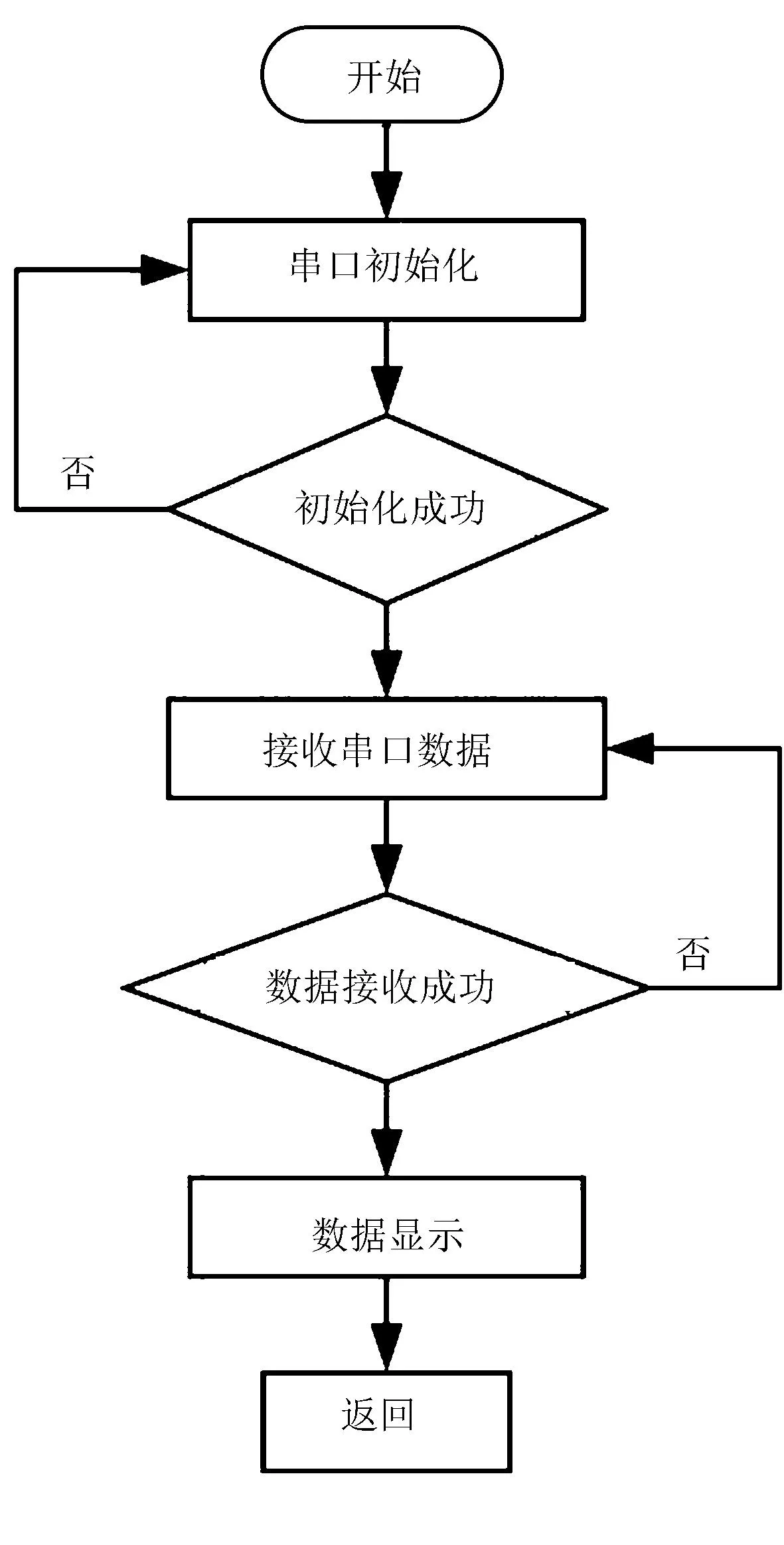
图7 养分检测系统上位机工作流程图Fig.7 Working flow chart of upper computer of nutrient detection system
4 系统测试分析
对水稻田土壤养分检测系统GPS定位系统进行测试时,记录系统运行过程中的散点图,与实际运行轨迹进行比对。图8为GPS模块定位数据与运行轨迹对比曲线。
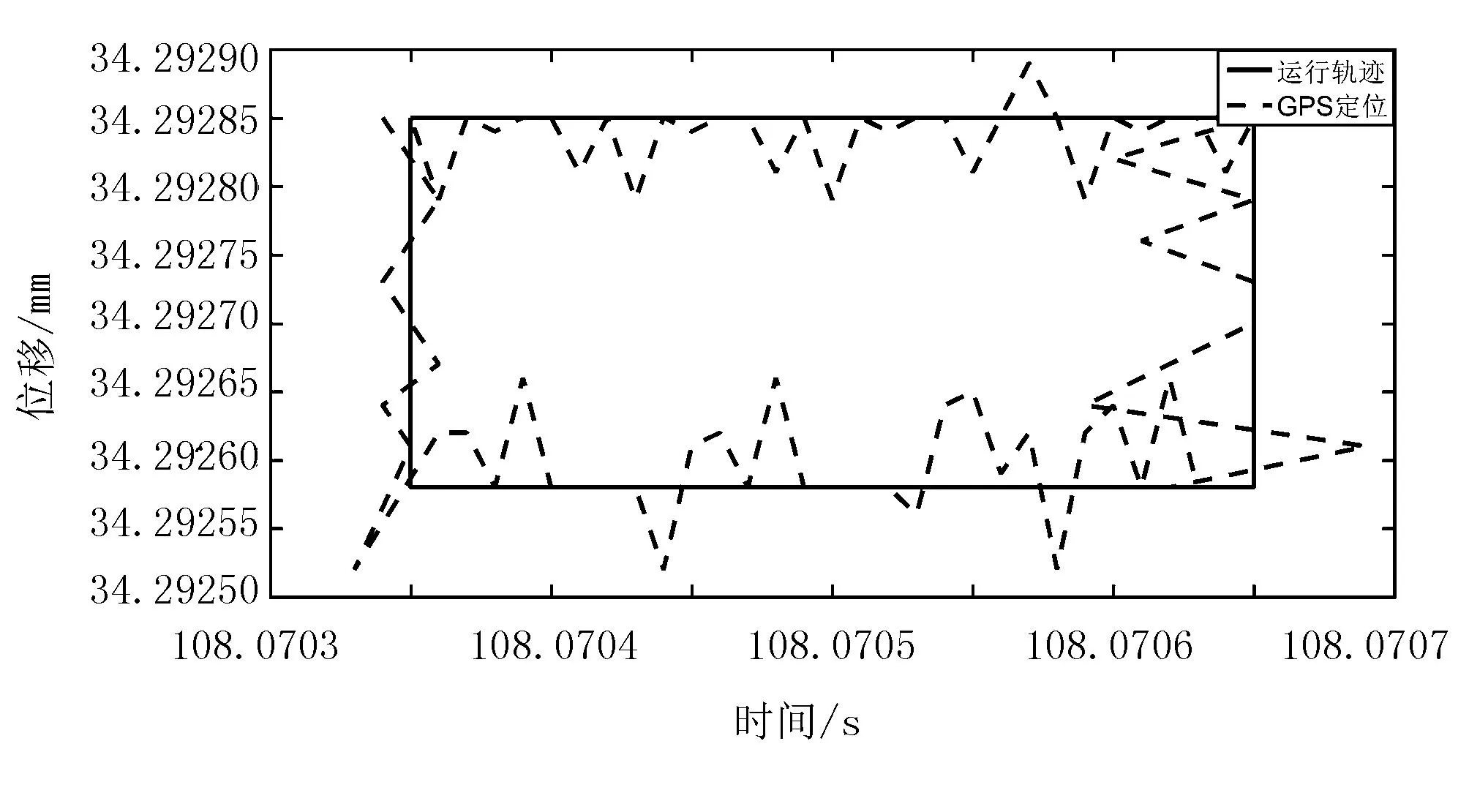
图8 GPS模块定位数据与运行轨迹对比曲线Fig.8 Comparison curve between GPS module positioning data and running track
水稻田土壤养分检测实验测试过程中,记录检测系统获取到的检测点位置信息和土壤含水量,与人工检测到的土壤含水量进行比对,计算检测误差,如表3所示。
实验检测结果表明,含水量检测平均误差为3.17%。产生误差的主要原因是:土壤采集后水分挥发导致检测误差、传感器标定误差,以及采集过程中的深度或土壤品质导致的检测误差。
5 结论
基于GPS技术设计的水稻田土壤养分检测系统能够用于土壤养分的检测与位置信息记录, 系统运行过程中能够快速进行位置信息的获取,同时能够有效对土壤养分进行检测。系统运行过程稳定可靠,具有较好的通用性能。
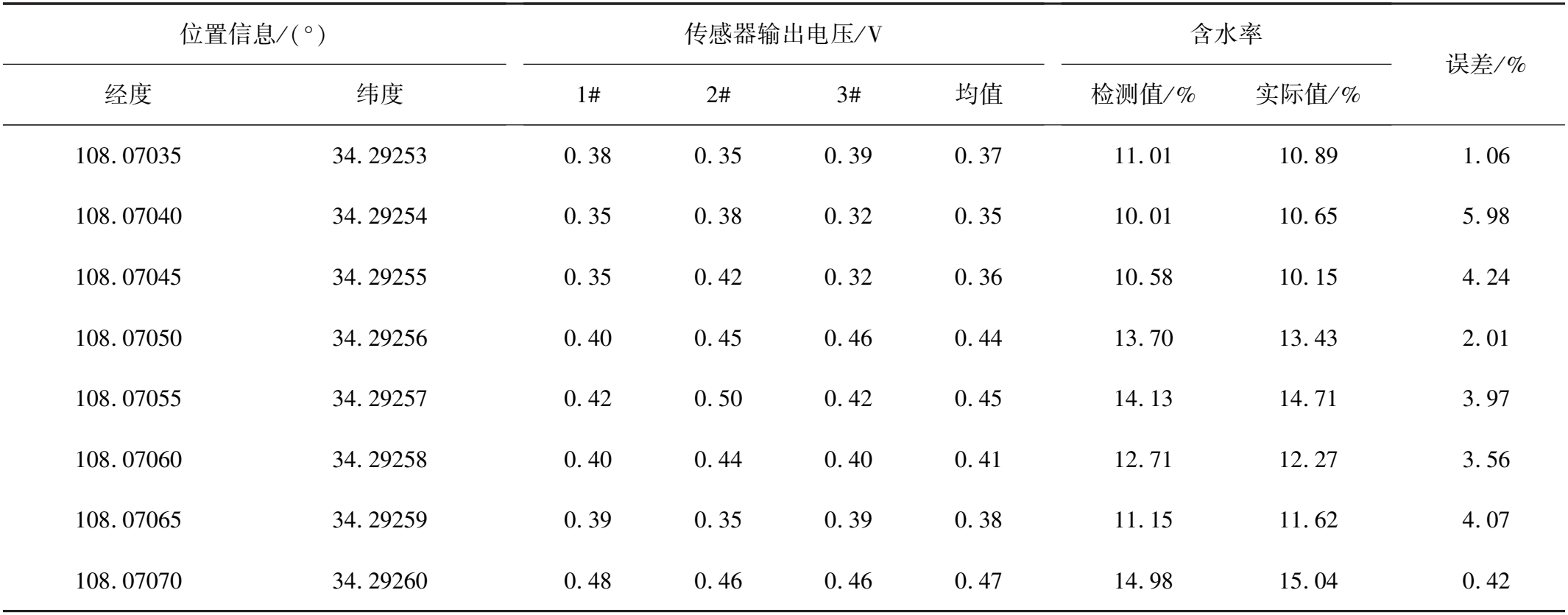
表3 水稻田土壤养分检测实验数据
