航测像控点测量与布设下的智能施药作业研究
2024-01-09麻丽明沈海军王贵丽
麻丽明,沈海军,王贵丽,周 燕
(河北机电职业技术学院 电气工程系,河北 邢台 054000)
0 引言
为推进精确农业发展,利用植保无人机对果树喷雾施药区域像控点进行测量,通过激光雷达扫描果树施药目标区域,并与布设点数据进行对比,生成喷雾施药目标点和施药喷头仰角控制指令,且基于增量式PID控制算法对喷头仰角进行追踪控制,达到施药喷头的精准控制,旨在为施药精准化智能控制装备的设计提供参考。
1 像控点测量与目标追踪
在研究智能施药控制时,采用的施药机器人为一种履带驱动式跟随喷雾机构,利用激光雷达进行施药区域目标对象探测;跟随式喷雾施药系统为多喷头对称式喷雾装置,喷雾角度能够根据施药目标自动调节,并可根据作业需求进行左右两侧左右调节,使用离心式风机对喷雾气流进行调节,辅助施药雾化控制程度[1-2]。表1为智能施药系统关键技术参数。
智能施药系统主要用于树冠层底部位置的施药作业,与植保机配合,形成地空协同式立体植保作业模式[3]。
图1为地空协同式植保作业模式示意图。其中,植保机用于对地面施药目标图像进行测量,形成航测像控位置点;喷雾施药机器人对树冠层下部进行施药,实现智能施药控制[4]。
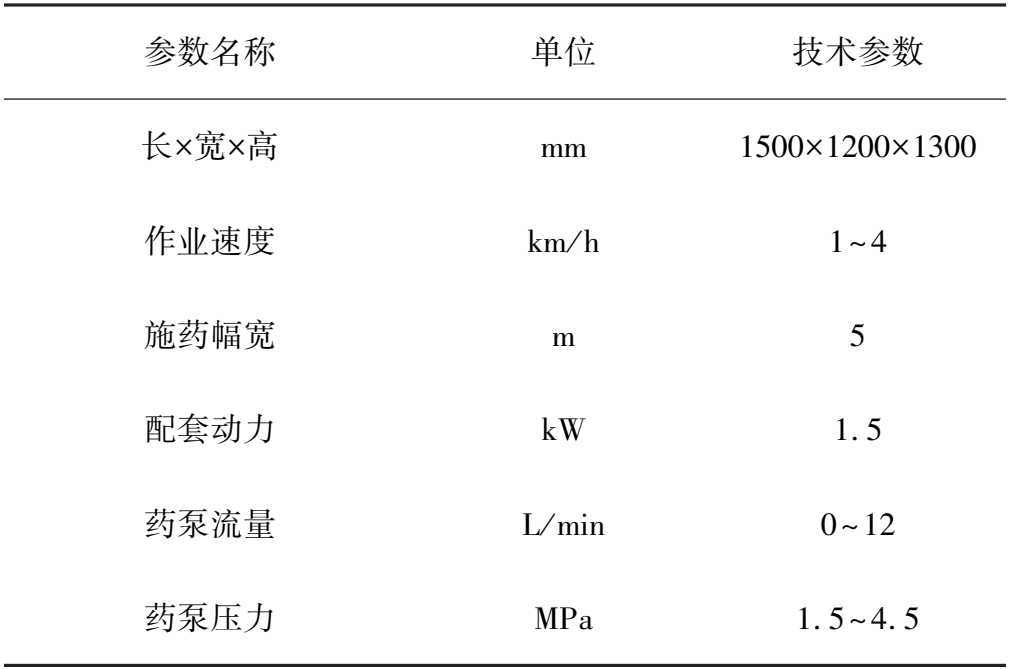
表1 智能施药系统关键技术参数
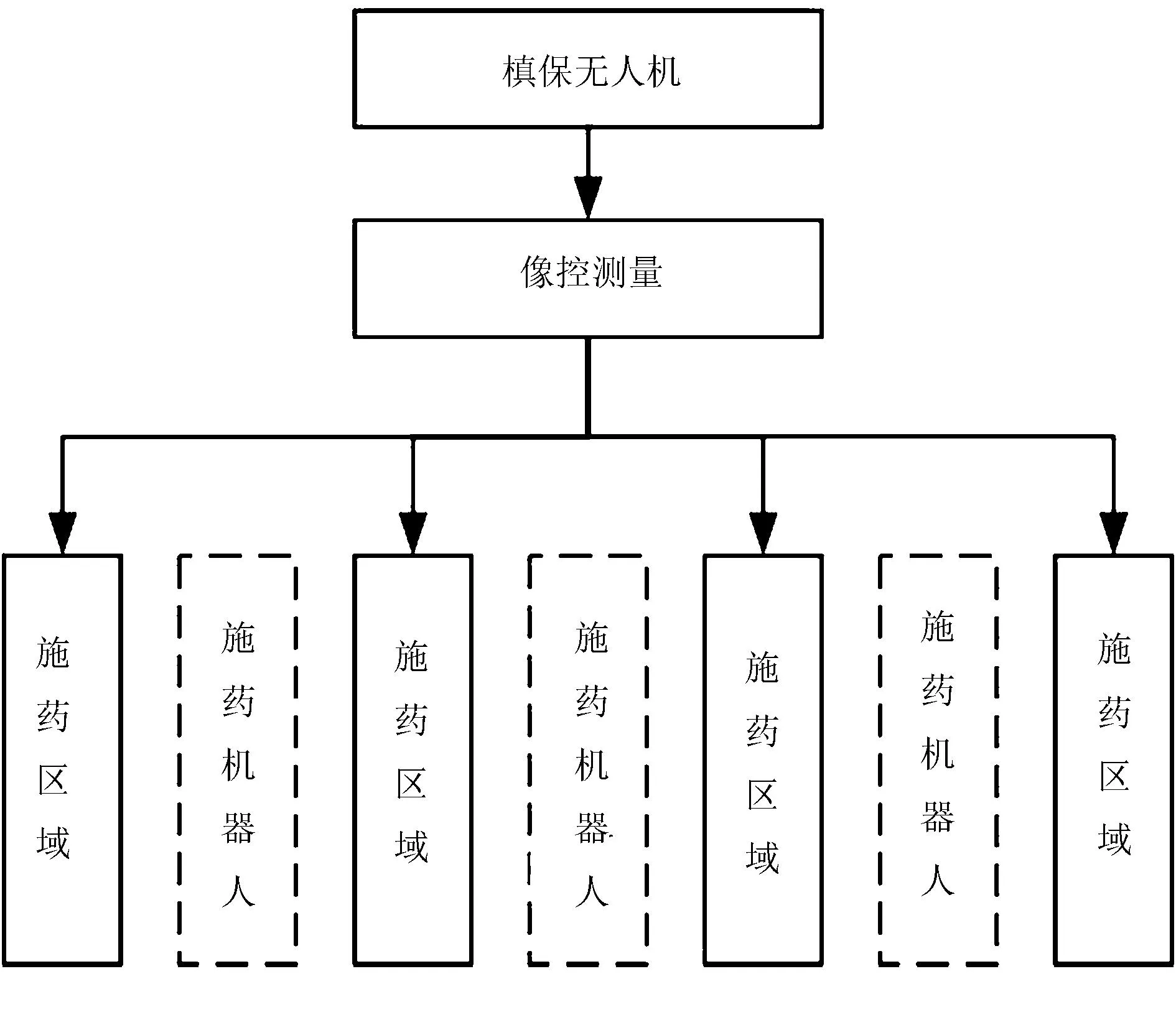
图1 地空协同式植保作业示意图Fig.1 Schematic diagram of ground air cooperative plant protection operation
智能施药目标区域探测与施药目标追踪硬件控制框图如图2所示。控制系统主单元采用STM32单片机,接受无人机航测像控点图像数据,利用脉冲调制方式进行施药喷雾电推杆的伸缩和升降机构升降控制,根据编码器脉冲反馈信号进行实时作业控制,工控机用于对激光雷达扫描结果和图像数据进行分析处理,从而得出喷雾施药目标位置坐标和喷雾施药仰角,并将控制参数发送至主控制单元[5-6]。

图2 目标探测与追踪系统硬件框图Fig.2 Hardware block diagram of target detection and tracking system
智能喷雾施药系统作业前,作业人员根据果树的整体生长高度趋势设计喷雾施药机构高度调节范围,使施药喷头头能够覆盖喷雾施药区域[7]。作业过程中,喷雾施药系统能够自主在施药区域内进行行走,根据航测像控点测量数据对施药目标区域的间隙、方位以及高度进行表征,控制系统根据雷达数据实时探测目标对象位置,并根据施药目标位置调整施药仰角[8]。图3所示为智能喷雾施药系统作业流程图。
2 喷雾施药区域探测方法
智能喷雾施药装置采用激光雷达作为传感器,可在360°范围内进行扫描,扫描频率为8~20Hz,最远扫描距离为40m,能够满足喷雾施药作业过程需求[9]。扫描探测过程中,为了避免杂草和其他作物的干扰,降低系统作业过程的数据运算量,假设存在雷达扫描的单侧有效区域内梯形ABCD,C为雷达探测中心,AB为探测区域上限,CD为探测区域下限,以雷达探测点所在平面为基准,基准以上扫描角度为正值,基准以下扫描角度为负值。
在喷雾施药目标点选取过程中,当喷头距离目标点位置过小时,会导致喷雾施药仰角过大,施药上喷头超过目标喷雾区域上限,施药下喷头超过目标喷雾区域下限;喷雾施药仰角过大或者过小,均会导致农药脱离目标区域[10,11]。
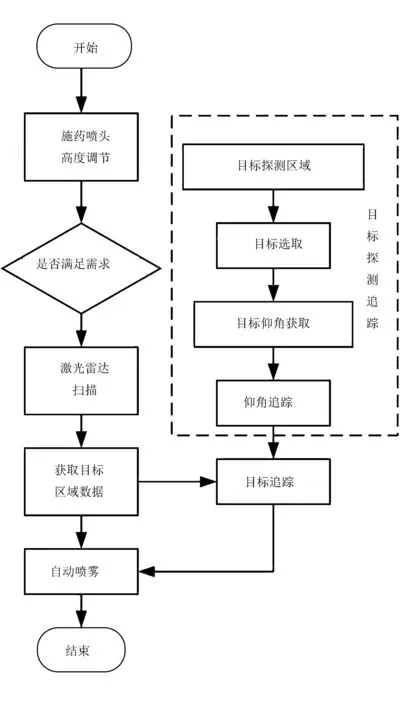
图3 智能喷雾施药系统作业流程图Fig.3 Flow chart of intelligent spray spraying system
利用无人机航测像控点测量得到施药区域平均直径为
其中,ri为第i个施药点的区域半径;n为施药点总数。
为确定施药点位置,需要确定施药点M的极角,根据施药喷头的电动推杆结构尺寸以及行程参数,施药喷头的最小仰角为0°,施药喷头的最大仰角为αmax,施药点极角与施药喷头仰角极限值和激光雷达与喷头之间的相对位置有关[12],如图4所示。其中,图4(a)为施药点最小极角位置示意图,图4(b)为施药点最大极角位置示意图。

图4 施药点极角几何关系Fig.4 Geometric relationship of polar angle of application point
当施药喷头运动平面映射到扫描平面时,假设雷达探测中心为坐标原点O,水平面为x轴,竖直面为y轴,H为施药喷头旋转中心与施药机器人底盘之间的高度差。当喷雾仰角为αmax时,施药点极角为上边界δmax;当喷雾仰角为0°时,施药点极角为下边界δmin,则根据几何关系可以得出
施药喷头中心轴线与施药点M之间的夹角表示施药目标仰角,施药喷头运动过程平面映射到雷达扫描平面[13],故由几何求解可以得出

为保证施药喷头仰角角度控制精度,在设计智能控制系统时,采用增量式PID喷头仰角控制算法。控制系统首先采集电动推杆编码器脉冲信号及施药目标点的目标仰角,主控制器对脉冲信号进行采集和计算分析,获取动态施药仰角,将仰角实测值与仰角目标值对比,求解误差值;由PID控制器进行误差修正,向电动推杆驱动器发送控制指令[14]。图5所示为智能施药控制系统模型。
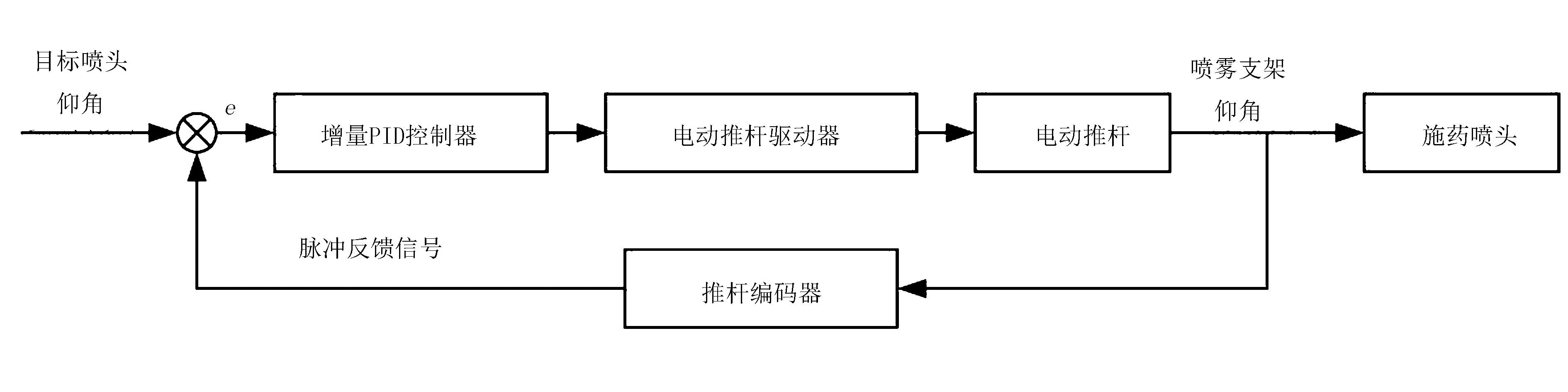
图5 智能施药控制系统模型Fig.5 Model of intelligent pesticide application control system
3 系统试验分析
为了验证施药喷头控制过程中航测像控点与目标仰角定位控制的准确性,在长40m、宽12米的区域内进行喷雾施药试验。区域内种植果树行距和株距均为3m,果树高度4m,果树主枝干高1m。
试验过程中,施药喷头安装在高度为500mm的履带机器人本体上,激光雷达安装于机器人最前方,激光雷达与履带点上表面之间的高度差为470mm。喷雾施药过程中,机器人本体运行速度为0.5m/s,到达终端位置时自动调转行驶方向,对另一行果树继续喷雾施药。试验完成后,随机挑选3棵果树,对喷雾施药目标区域中心点与目标仰角数据进行统计分析。果树施药喷头高度变化数据、喷头仰角与脉冲数据如表2所示。
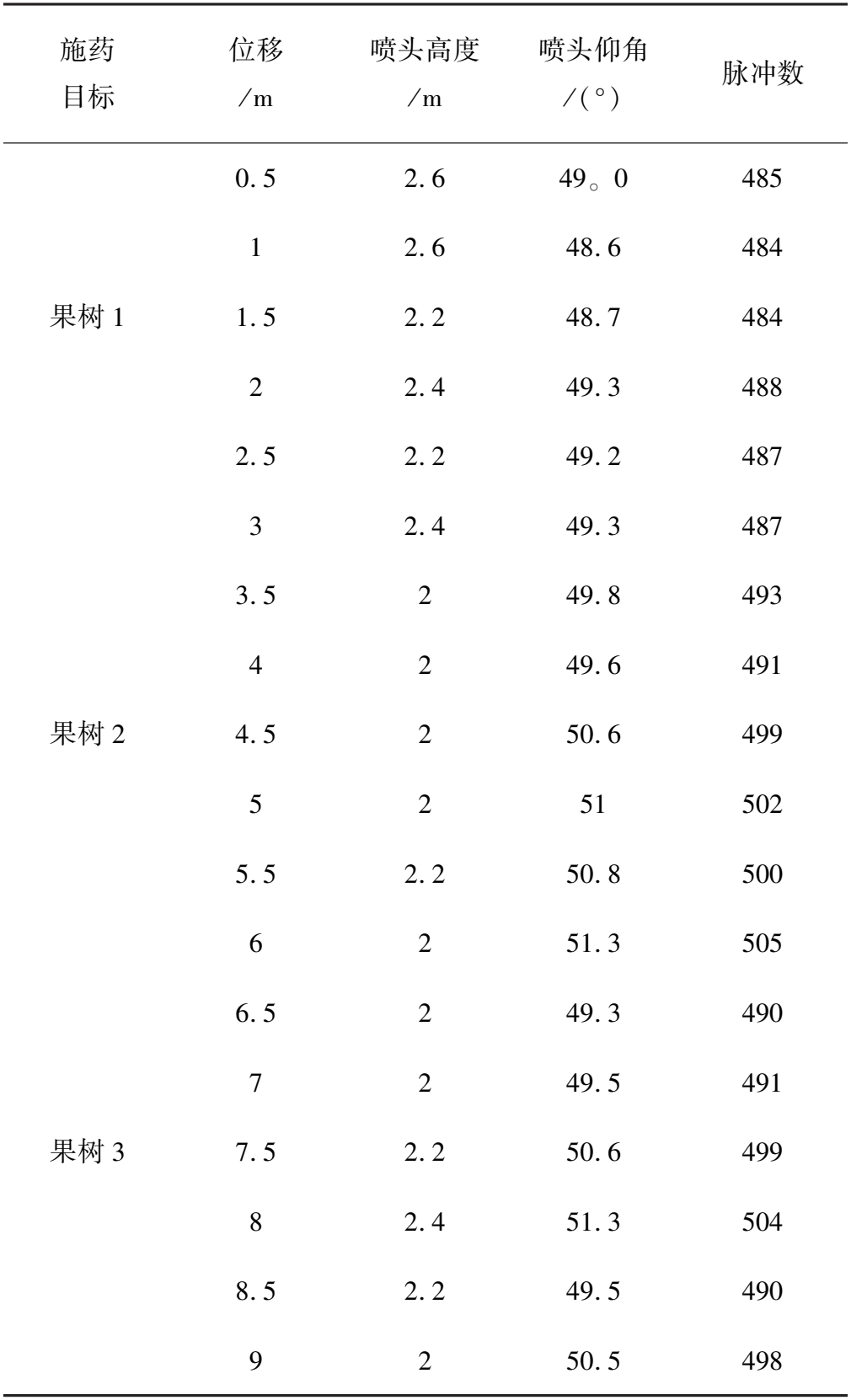
表2 喷头高度、仰角与脉冲数据
从表2中数据可以看出:施药喷头的目标区域中心集中于高度2~3m范围内,对于5m高的果树,该高度区域可满足树冠下部的喷雾施药作业需求。;棵果树的最小施药喷头仰角为48°,最大施药喷头仰角为52°,在5°变化范围内,脉冲数调节时间为0.02s,可满足喷雾施药过程中的时效需求。
4 结论
基于无人机航测点测量与布设技术,设计一种用于果园喷雾的智能探测与控制追踪系统。系统采用雷达获取果树的点云数据,利用分割算法进行点云数据处理,获取施药目标点区域信息,并基于对航测点数据分析得到喷雾施药仰角,实现智能化精准施药控制,为农业智能化施药研究提供了参考。
