采摘机器人机械手避障方法研究
——基于遗传优化和模糊PID控制器
2024-01-09孟庆辉魏宏飞
王 娜,孟庆辉,魏宏飞
(河南工业职业技术学院,河南 南阳 473000)
0 引言
在自动控制领域,机械手被广泛应用到农业和工业生产领域;在农业方面,机械手主要被应用到采摘机器执行末端的设计上。机械手性能对采摘效率和采摘质量的影响较大,如果机械手的自动化程度较高,则可以快速地锁定待采摘的果实目标,并自动避开障碍物,移动到定位位置上,实现果实的高效率采摘。机械手移动的平稳性对果实采摘的质量影响较大,如果机械手移动和采摘过程不平稳可能造成果实的损伤,进而影响采摘的质量。因此,需要在机械手的设计中引入更多的智能控制算法,以得到更好的自动化采摘效果。
1 采摘机器人机械手避障控制系统
采摘机器人在执行作业任务时,机械手末端执行果实采摘任务是最重要的环节之一。在机械手进行果实采摘时,定位到果实的具体位置后,控制器锁定目标位置,再控制机械手末端移动到达目标果实位置;但是在移动过程中,由于受果实枝叶和目标以外的果实的影响,会给机械手的移动造成一定的障碍。为了平稳、快速地到达目标果实位置,机械手应避开障碍物,这就需要避障系统的控制,其控制流程如图1所示。
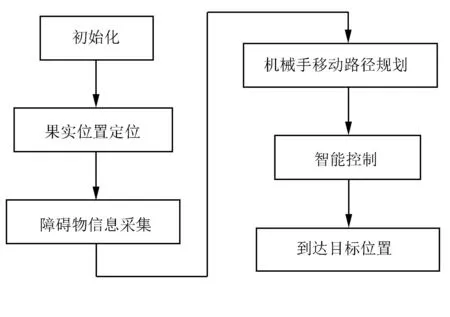
图1 机械手避障控制流程Fig.1 The control process of robot obstacle avoidance
在采摘过程中,采摘机械手为了避开障碍物需要引入智能化控制系统;在锁定采摘目标后,利用智能化控制系统使机械手避开障碍物,到达预先定位到的待采摘果实的位置;在避障过程中,为了实现自动化控制可以采用PID控制器,PID控制器采用反馈调节的方式使控制系统的误差较小,而反馈过程可以利用模糊和遗传算法进行优化,提高算法的效率和精度。
2 机械手模糊PID控制器设计
在采摘机器人自主化作业时,机械手的自动化程度是影响果实采摘质量和效率的关键因素。如果机械手在采摘果实时不能对障碍物进行有效避让,不仅会影响其作业进度,还会碰到其他待采摘果实,造成果实的损伤;如果碰撞次数过多,还会造成机械手的损伤,故机械手自主避障功能的设计非常必要。在自动化控制器中,PID控制器是常用的自动调节控制器,在采摘机械手传感器发现障碍物后,PID控制器可以通过反馈系统将位置信息和误差信息反馈给控制中心,通过发出控制指令来移动机械手,实现成功避障。为了提高控制器的精度,可以采用模糊算法对其进行优化。假设初始的输出误差为e,反馈调节过程为
(1)
其中,Kp、Ki、Kd分别表示控制器的控制参数。在设计控制器时,需要得到一组最佳的Kp、Ki、Kd,使系统产生的误差最小,而模糊控制算法可以实现控制器参数的优化,其流程如图2所示。

图2 PID控制器参数优化过程Fig.2 The parameter optimization process of PID controller
在PID控制时,参数的选择一般更具经验值,而模糊算法可以选择最佳经验值,使控制误差最小。模糊控制采用经验值的方法,可以在模糊控制器中输入量可以由两部分组成,包括避障碍误差的期望和实际值偏差以及偏差率。假设偏差为E,偏差率为EC,则输入量为
U=α×E+(1-α)EC
(2)
其中,α为修正因子。
当E较大时,则
u=a2E+(1-a2)EC
(3)
当E较小时,则
u=a1E+(1-a1)EC
(4)
其中,修正因子α1、α2∈(0,1)且α1<α2。当输出的控制误差优化到最小以后,可以通过自适应调节,来控制机械手的移动速度,使机械手的移动和避障过程达到最优化。自适应过程可以利用遗传算法的优化来实现。假设v表示1组移动速度的向量,t表示交叉次数,a表示初始移动速度,依据免疫遗传算法首先产生一个遗传序列,即
(5)

eval(ψm)=β(1-β)i-1(i=1,2,…,z,0<β<1)
(6)
其中,β是随机实数,且β∈[0,1]。
利用免疫遗传算法对比例系数进行自适应概率选择,则
(7)


(8)
其中,y是随机实数,且y∈[0,1]。
对比例系数进行变异操作,即
(9)
其中,N为变异种群的数目;s为变异系数。
采用遗传算法后对移动量进行筛选,选择最好是的机械手移动速度,以保证采摘过程的平稳性,提高采摘质量。控制器的控制流程如图3所示。

图3 采摘机械手控制器流程Fig.3 The process of picking manipulator controller
采摘机器人在进行采摘时,实现机械手一次移动的控制流程是:先通过传感器锁定待采摘果实的具体位置,再对果实周围的障碍物进行扫描,控制器发出机械手移动的控制指令;在移动过程中,PID反馈调节控制实时的反馈位置和速度的控制误差,并通过模糊和遗传算法优化,来提高机械手移动时位置和速度的控制精度,最终达到高精度平稳的移动。
3 采摘机器人机械手控制器测试
随着农业现代化和智能化技术的不断发展,采摘机器人被应用到农业生产过程中,具有较高的作业效率,且可以持续作业。在果实成熟季节,可以帮助果园管理人员及时的收取果实,将多机器人应用到果实采摘过程中,还可以实现规模化作业。在采摘机器人自动化作业过程中(见图4),采摘机机械手的作业环境较为复杂,因为除了作物的枝叶,其他未采摘的果实都可能成为采摘机械手的障碍物,为了实现果实的顺利采摘,机械手必须具有自主避障功能。

图4 机械手采摘果实过程Fig.4 The process of picking fruit by manipulator
采摘机械手为了躲避障碍物,首先需要对障碍物的信息进行采集,再将其传送到控制器中心确定障碍物的位置,并发出指令使机械手有效地避开障碍物,到达锁定的目标位置进行采摘。在机械手避障过程中,为了提高机械手移动的精度和平稳性,采用遗传和模糊算法对其PID控制器进行了优化。遗传模糊优化规则表如表1所示。

表1 遗传模糊优化规则表
通过遗传模糊优化可以得不同角度对应的速度模糊控制规则表,将模糊控制规则表利用编程的方式嵌入到硬件控制系统中,可以在机械手转向避障的过程中,采用合适的速度移动机械手,从而提高机械手移动的平稳性。模拟机械手自动采摘过程的环境,设置了机械手的障碍物,对机械手的避障过程进行了测试,并根据机械手的移动过程,绘制了机械手移动轨迹结果,如图5所示。

图5 避障算法测试Fig.5 The test of obstacle avoidance algorithm
通过对算法的测试,得到了机械手采摘过程的移动轨迹。结果表明:采用遗传模糊算法的PID控制器可以成功使机械手避开障碍物,达到锁定目标位置,实现精确采摘。
为了对比遗传模糊算法PID控制器的优势,对不同时间机械手的稳定性进行了测试,结果如图6所示。

图6 不同算法对比结果Fig.6 The comparison results of different algorithms
测试结果表明:相比单独的PID控制器和模糊PID算法控制器,采用遗传优化模糊PID控制器的摆动角度更小,更加趋近于0,从而可以提高机械手在采摘过程中的平稳性,对于实现果实的精确采摘和降低果实的损伤都具有重要的意义。
4 结论
为了提高采摘机器人果实采摘的准确性和稳定性,在采摘机械手的设计上使用了避障系统,在采摘果实时机械手可以成功避开影响移动的障碍物,顺利到达目标果实位置。采用模糊和遗传算法对机械手PID控制器进行了优化,优化后的控制器可以成功地实现避障功能,并在移动的平稳性上的有所有改善,对于实现果实的高精度采摘具有重要的意义。
