基于计算机网络算法的智能插秧机控制优化
2024-01-09符志军王景景
符志军,王景景
(江西工程学院,江西 新余 338029)
0 引言
我国是一个农业大国,水稻是我国最主要的经济和粮食作物之一。在水稻生产中,插秧一直是制约其机械化发展的瓶颈环节。我国传统的插秧方式为人工方式,效率低,农民的劳动强度大。随着科技的发展,插秧机逐渐代替了人工插秧的方式,有效减轻了农民的劳动强度,提高了生产效率,种植均匀性和产量也得到了提升。但是,随着精细农业理念的提出[1-2],我国现有的插秧机智能化水平与发达国家仍然存在较大的差距,无法达到对插秧机的智能化和自动化控制,还需要对智能插秧机的控制优化展开研究。
要实现插秧机的智能化和自动化控制作业,前提是需要插秧机能够识别周边农田环境,进行精确的导航,自主规划行驶路线行走,完成既定任务[3]。插秧机的自主导航技术是智能农业装备的必备组成之一,其集合了地理信息系统、遥感技术和智能农业机械等技术[4]。采用该技术不仅可以克服人工操作插秧机的弊端(如劳动强度大、无法实时了解插秧机作业状态等),而且能够实现无人导航作业。但是,要实现插秧机的自主导航,还需要相关算法对有关信息进行处理。
路径跟踪算法是计算机网络算法的一种,是实现插秧机自动转向或曲线跟踪的算法。模糊控制算法模型易于建立,但难以精确建立插秧机的跟踪模型;追踪算法易于获得函数关系,但不易调节车距。因此,将模糊算法和追踪算法结合,可以有效地解决各算法的缺点。目前,这两种算法结合的计算机网络算法还未在插秧机的自主导航系统上进行实践,故本文基于计算机网络算法对智能插秧机控制进行优化研究。
1 硬件设计
1.1 总体设计
该智能插秧机是在原有的手动操控的插秧机基础上改造完成,其控制系统主要组成包括单片机、视觉导航装置、自动转向装置、挡位和油门、数据采集系统、通讯装置及发动机等,如图1所示。

图1 智能插秧机控制系统结构简图Fig.1 The structure diagram of intelligent rice transplanter control system
1.2 单片机
单片机是整个插秧机控制系统的核心部件,用于对插秧机的作业过程进行控制。工作时,单片机将视觉导航装置、数据采集系统的信息接收、处理和分析后,将下一步动作以指令的形式发送至各末端执行机构进行相应的操作。
1.3 视觉导航装置
视觉导航装置主要用于获得插秧环境的三维信息,以准确识别插秧机的行驶路径,由CCD摄像头、视频采集卡和监视器等组成。作业时,CCD摄像头实时采集插秧环境图像,将光信号转化为模拟电信号后传递给视频采集卡;其后,视频采集卡进一步将信号转换为单片机可处理的数字信号,从而准确读取图像信息,进行行驶路径的识别。
1.4 自动转向装置
自动转向装置用于控制插秧机的转向,其性能决定了导航系统的稳定性和可靠性。目前,自动转向装置主要分为两种:第1种是在将原有的液压转向系统进行改装,包括增加液压控制阀等,通过控制阀门的换向和开口即可进行自动转向;第2种是采用电动方向盘替代原有的方向盘,其结构简图如图2所示。这种方向盘的结构主要包括步进电机、齿轮、转向轮及方向盘,通过控制电机的转向、角度和速度等实现自动转向[5]。本控制系统采用第2种自动转向装置。
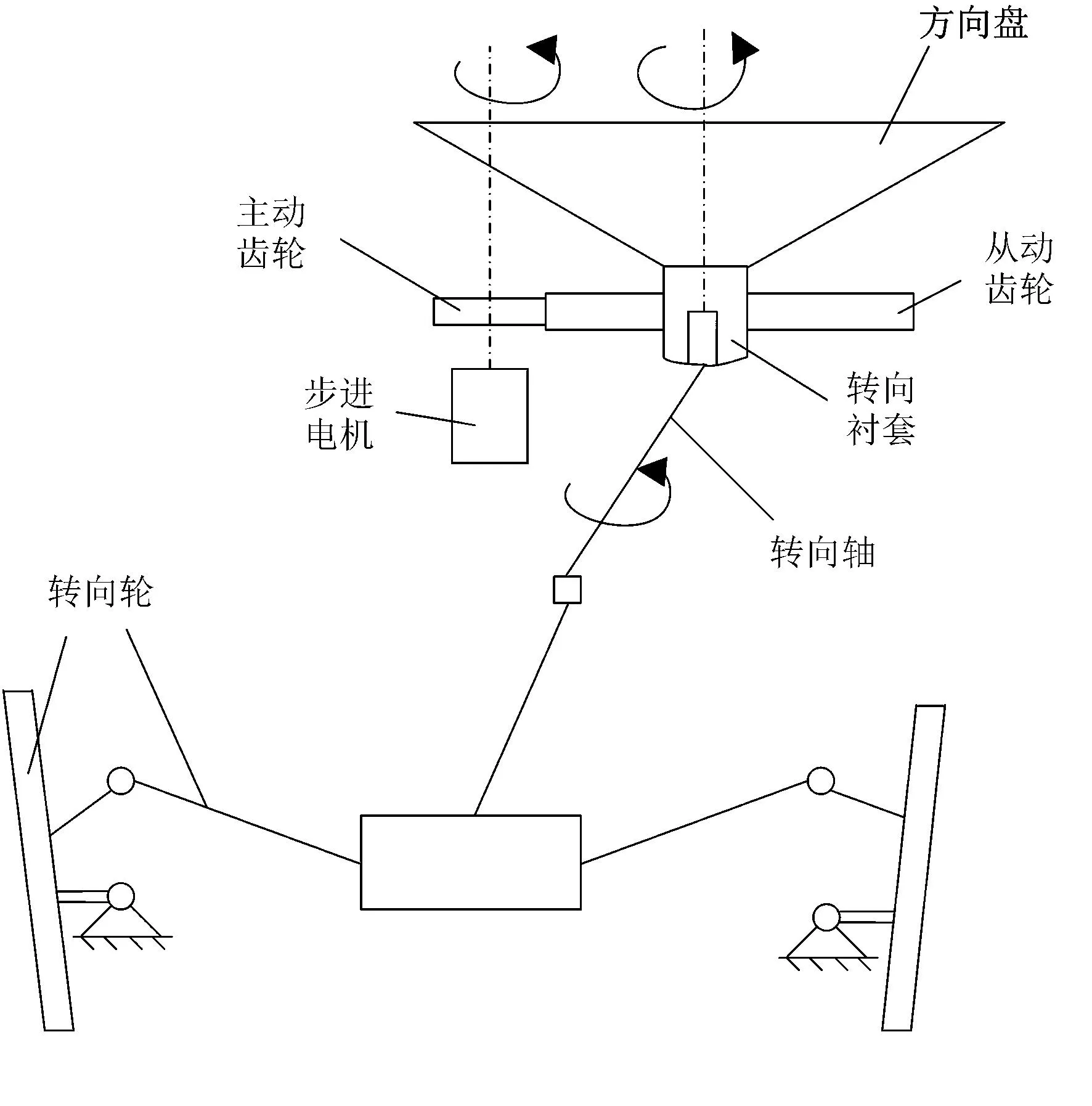
图2 电动方向盘结构简图Fig.2 The electric steering wheel structure diagram
1.5 挡位和油门
挡位用于控制插秧机的行驶速度。原有的挡位为多杆机构,其结构图如图3(a)所示。工作时,操作手杆1的运动会带动控制杆2运动,从而改变行驶速度。在改装时,在原有的多杆机构基础上加装1个曲柄摇杆机构。通过步进电机带动曲柄摇杆机构,从而控制行驶速度。改装后的结构如图3(b)所示。
油门用于加大插秧机的行驶速度,原有的油门为踏板的形式,通过驾驶员踩踏板达到加速的目的;为了自动控制行驶速度,在踏板上加装电动推杆,通过收缩和拉伸电动推杆即可控制油门。
1.6 数据采集和监控系统
数据采集和监控系统主要用于插秧机行驶状态的采集和监控,包括通讯装置的参数设置、插秧机的行驶状态、发动机的运行参数、位置参数和视觉导航装置运行状态共5个部分。系统将采集到的数据通过通信装置协议解析后,可以将动态变化趋势绘制成曲线图,并存储至数据库以备后续的查询。数据采集和监控系统的结构如图4所示。

图4 数据采集和监控系统结构图Fig.4 The structure diagram of data acquisition and monitoring system
1.7 通信装置
通信装置主要用于完成数据信息的传递,本文采用CAN总线结构[6]。工作时,各传感器节点完成数据采集后,将数据上传至CAN总线,通过通讯协议解析后利用GSM模块将数据传输至单片机,以供数据的分析、显示和调用。通信装置的结构图如图5所示。
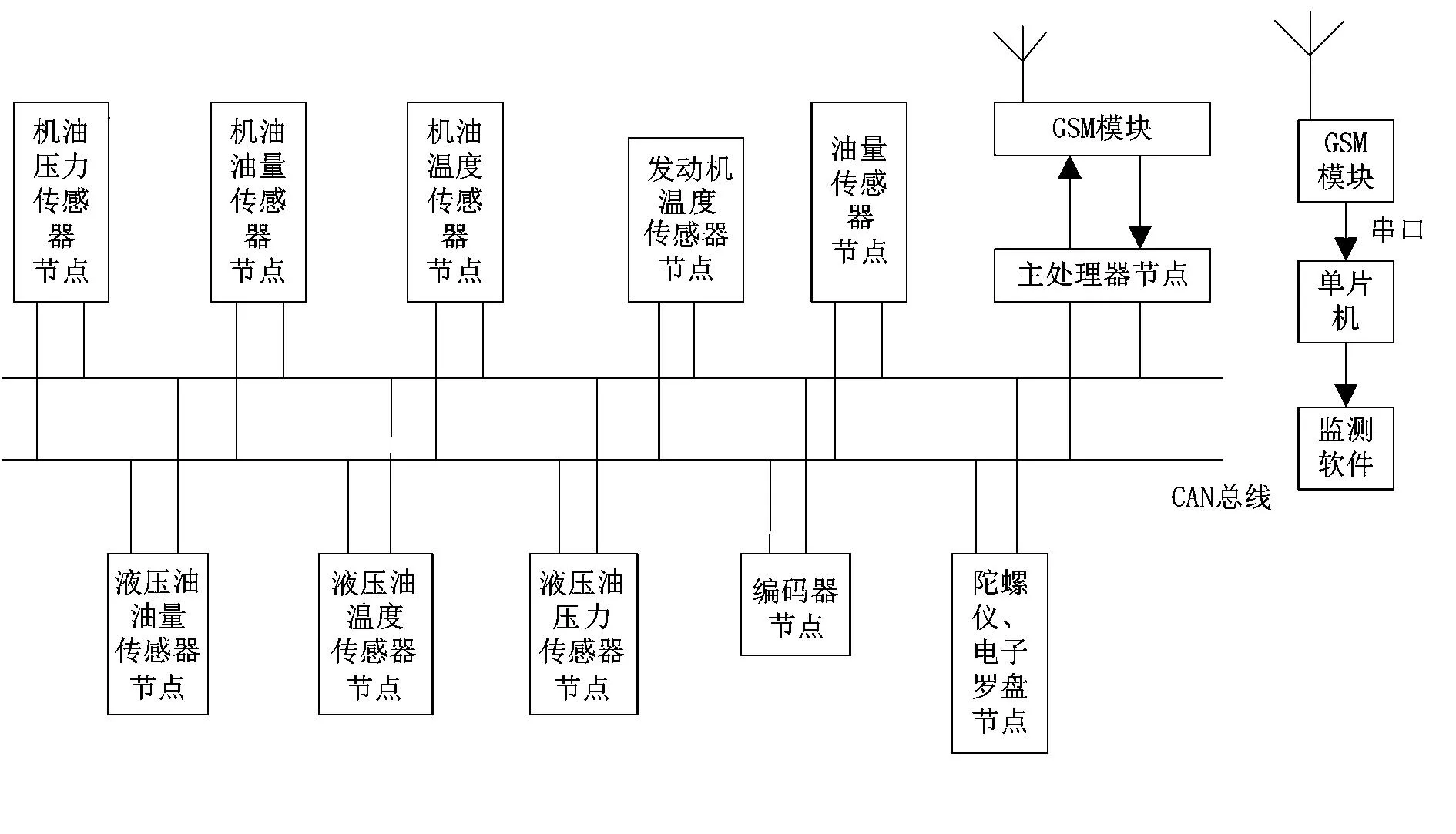
图5 通信装置结构图Fig.5 The structure drawing of communication device
2 智能插秧机控制算法优化设计
插秧机进行自动导航时,首先需要将插秧机抽象为数学模型;然后根据插秧机各部位传感器获取的运动参数,将当前插秧机的位置信息与预设路径对比,按照模糊算法和纯追踪算法结合的控制算法对前轮转角求解,将结果传递至单片机;最后,控制电动方向盘的转动角度,直至插秧机行驶至预设路径。智能插秧机的自动导航原理如图6所示。
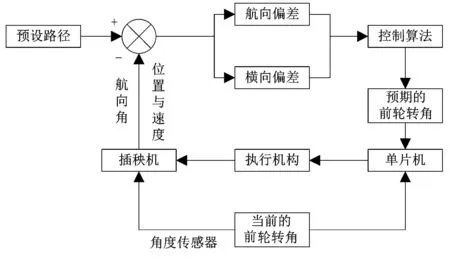
图6 智能插秧机的自动导航原理图Fig.6 The principle diagram of automatic navigation of intelligent rice transplanter
2.1 插秧机数学模型的建立
由于插秧机的前轮负责转向,则后轮中心可视作整个插秧机的控制点,则插秧机可简化为二轮车模型[7],如图7所示。
模型的横坐标为规划行驶路径,正向为插秧机前进方向。该模型建立的前提是假设插秧机保持恒速直线行驶,且路面平整。通过对模型分析,可以得到插秧机的运动学模型的公式为
x(t)=vycosα(t),y(t)=vysinα(t),α(t)=vytanδ/L
其中,vy为插秧机的纵向行驶速度,可通过速度传感器测得;α和δ为插秧机行驶的航向角度和前轮转角,α可通过陀螺仪测得;L为插秧机前后轴间距,本系统L=1.52m。通过对插秧机自动转向装置进行分析,可得装置的传递函数H(s)为
其中,K(s)和F(s)分别为期望和实际的前轮转角拉氏变换的结果[8]。

图7 二轮车模型简图Fig.7 The sketch of two wheeler model
2.2 自动导航控制算法设计
插秧机在进行自动导航时,需要预先规划行驶路径,并输入导航软件。该预设路径可看作点的集合,可表示为
M={P0(x0,y0),P1(x1,y1),...,Pn(xn,yn)}
导航模糊控制器的设计步骤如下:第1步为确定控制器的输入变量为行驶的横向偏差和航向偏差,输出变量为前轮转角;第2步为控制规则的设计,包括输入、输出变量的模糊化处理,模糊量隶属度函数和隶属度的设计以及控制规则的制定;第3步为模糊推理和反模糊化,包括输入量与模糊值的匹配,推理蕴含模糊集合;最后一步为模糊算法应用程序的编制。通过该导航模糊控制器可以得到一个期望的前轮转角。
进行纯追踪算法控制器的设计,第1步求解路径弯度Φ。在规划路径上搜索与当前插秧机位置最近的点坐标为Pm(xm,ym),而后在规划路径上每隔i个点取一个点,共取3个点,坐标分别为Pm+i(xm+i,ym+i)、Pm+2i(xm+2i,ym+2i)和Pm+3i(xm+3i,ym+3i)。路径弯度Φ为PmPm+i和Pm+2iPm+3i的最小夹角,计算公式为
(ym+i-ym)(ym+3i-ym+2i)

第2步求解前视距离l,计算公式为
l=lj+k1v+k2φ
其中,lj为前视距离的基础值;k1和k2分别为速度和路径弯度系数;v为当前插秧机行驶速度。
最后,建立纯追踪算法模型,求解图如图8所示。

图8 纯追踪法模型求解图Fig.8 The solution diagram of pure tracing method model
图8中,Pr和Pm分别为插秧机的当前位置和预描位置;C和R分别为转弯的圆心和半径;Ψe为航向偏差。通过对图8进行分析,可以得到前轮转角δ'为
将模糊控制器和纯追踪算法控制器求得的两个前轮转角进行综合计算,可以确定最终的前轮转角δ2,计算方式为
δ2=k3δ+k4δ′(k3+k4=1)
其中,k3和k4分别为模糊算法和纯追踪算法的前轮转角的量化参数。
3 试验结果
为了验证该智能插秧机的控制性能,需要对其进行相关试验。由于对插秧机的自动导航功能进行了优化,因此主要对插秧机的自动导航的控制算法进行相关试验。
基于田间环境较为复杂、人工数据采集较为困难的现状,在平坦的水泥路面进行自动导航试验。自动导航试验在两种预设路径进行行驶:第1种是直线行驶,第2种是直线和转弯混合行驶。插秧机自动导航路径的跟踪效果图分别如图9(a)、(b)所示。
由图9可知:预设路径和自动导航路径的重合度较高,仅在转弯处的重合度较差。这可能是由插秧机转弯时的侧滑以及灵敏度的误差引起的,但恢复直线行驶时插秧机能够快速恢复跟踪,说明插秧机可以进行有效的自动导航。

图9 插秧机自动导航路径的跟踪效果图Fig.9 The tracking rendering of automatic navigation path of rice transplanter
4 结论
1)针对我国插秧机的智能化和自动化控制水平较低的问题,基于计算机网络算法对智能插秧机控制进行了优化研究。该智能插秧机的控制系统主要组成包括单片机、视觉导航装置、自动转向装置、挡位和油门、数据采集系统、通讯装置、发动机等。
2)为了使插秧机能够进行自动导航,先将插秧机抽象为数学模型,再按照模糊算法和纯追踪算法结合的控制算法对前轮转角求解,使插秧机能够按照预设路径行驶。
3)为了验证该智能插秧机的控制性能,对其进行自动导航控制试验,结果表明:插秧机可以进行有效的自动导航。
