机载RTK 定位精度对无人机测图精度的影响分析
2024-01-09吴珍丽彭小青吴迪军
吴珍丽,彭小青,吴迪军
(1.中铁大桥勘测设计院集团有限公司,湖北 武汉 430050)
如何提高无人机大比例尺地形测图的成果精度,一直是无人机航测学术界和工程界关注的重点之一[1]。影响无人机测图精度主要有2个关键因素:一是准确相机参数的获取;二是高精度POS数据的获取[2-3]。
大疆精灵4 RTK无人机相机的镜头参数在出厂时已经过检校,由于搭载的是机械结构不够稳定的非量测型相机,内方位元素和畸变参数一旦发生改变就无法保证测量精度[4],因此需定期进行相机畸变参数的检校并及时进行更新。而在POS数据获取过程中,在大多数情况下,RTK均能达到较高的精度,但在个别情况下,由于地球的大气层会对电磁波的传播产生路径以及时延上的影响[5-6],同时受到卫星上的原子钟、卫星星历等精准度的限制,电离层、对流层误差、星历、星钟误差等均会对RTK定位精度产生影响,其定位精度可能会出现较大波动,从而影响最终的测图精度。本文在G3 铜陵长江公铁大桥项目实施过程中发现,由于部分测区的大疆精灵4机载RTK定位精度较低,进而导致生成的航测地形图成果精度降低。因此本文结合该项目,进一步分析了机载RTK定位精度对无人机航测精度的影响,并提出了确保测图精度的技术方案。
1 项目概况
G3铜陵长江公铁大桥连接长江南岸的铜陵市区和长江北岸的枞阳县,承担既有铜陵长江公路大桥替代桥功能(替代高速公路),同时搭载铁路过江,在铜陵长江公路大桥上游侧约700 m,主桥桥跨为113.5 m+145 m+988 m+145 m+113.5 m,大桥按照“4线铁路+6车道高速公路”的标准建设。铁路桥面布置2线合庐铜城际、2线城市轨道交通1号线;公路桥面布置双向6车道京台高速,两侧设置紧急停车带。本次测量任务为:在当地测绘部门已收集的1∶2 000地形图基础上,针对部分地形变化较大区域进行修补测,修补测区域为线路中线左右约100 m范围内共6个分散的测区。
2 无人机航测数据获取与试验方案
该项目的数据获取利用大疆精灵4 RTK无人机及机载的2 000 万分辨率数码相机,按照1∶500 比例尺成图要求及无人机飞行相关要求设计飞行实施。飞行航高设计为100 m,航向重叠度为80%,旁向重叠度为70%。航飞拍摄前,将收集到的控制点及航测范围线导入卫星影像图中,通过卫星影像图确定作业范围是否为禁飞区、限高区,大致判断无人机起降场地、飞行高度。通过踏勘实地核查周边高层建筑物、高压输电线路、河流、高山等影响安全的因素,确定无人机起降场地。本项目外业航拍历时3 d,共计飞行30架次,累计飞行时间495 min,拍摄时间344 min,拍摄相片7 411 张。每架次拍摄的像片均确保无人机RTK 解为固定解。项目实施过程中,采用千寻CORS作为机载RTK的差分源。
在航飞作业过程中,随时观察并记录机载RTK的定位精度,即遥控器上显示的RTK实时动态精度。经过内业处理生成三维实景模型后,根据测定的检查点来评定模型上对应成果的精度,以此分析机载RTK定位精度对测图精度的影响。所有测区均匀布设一定数量的检查点,检查点选取航测任务范围内的明显地物点,一般选取比较清晰的公路地面标识线角点,方便后期内业比对统计。使用Trimble R10 GNSS 接收机以RTK定位模式实测检查点的坐标、高程,测量方式为双测回平滑采集,每个测回采集30个历元的数据,最终以2个测回共60个历元数据的均值作为检查点的成果。
3 机载RTK定位精度对测图精度的影响分析
计算检查点在三维实景模型上的坐标值与RTK实测坐标值的差值,统计测区1~6共40个检查点的精度如表1 所示。表中,△X 表示检查点在平面坐标(X)方向的坐标差值;△Y表示检查点在平面坐标(Y)方向的坐标差值;△H 表示检查点在高程(H)方向的差值。
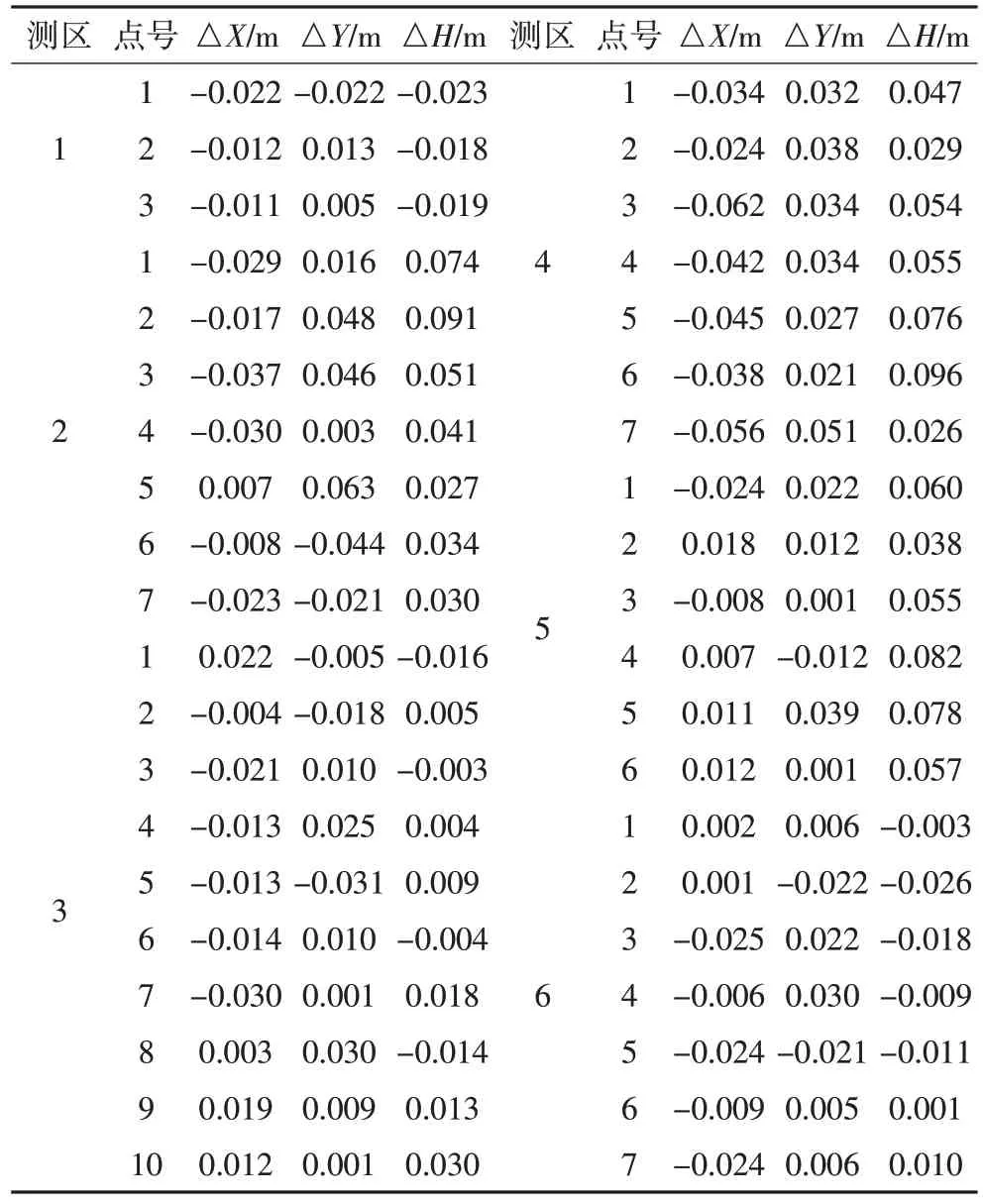
表1 检查点精度统计表
从表1 可以看出,测区1、测区3、测区6 的检查点精度较高,而测区2、测区4、测区5 的检查点精度整体较低。在项目航测中发现,测区1、测区3、测区6 航飞作业时机载RTK定位精度为2~3 cm,而测区2、测区4、测区5航飞作业时机载RTK定位精度为5~9 cm,反映出航测地图的精度与机载RTK精度的正相关性。
为了进一步分析测区2、测区4、测区5 精度较差的原因是否与机载RTK 的定位精度较差有关,以测区4 为实验测区,使用Trimble R10 GNSS 接收机自建单基站的方式执行航飞并实测检查点的坐标、高程。该测区外业航飞作业时机载RTK 显示的实时定位精度均为2~3 cm。统计的7 个检查点的精度如表2所示。

表2 测区4试验精度统计表(自建单基站RTK)
从表2 可以看出,在参与精度统计的7 个检查点中:X坐标偏差绝对值最大为0.033 m,最小为0.020 m,平均值为0.025 m;Y坐标偏差绝对值最大为0.031 m,最小为0.006 m,平均值为0.016 m;X坐标中误差为0.025 m,Y坐标中误差为0.018 m,平面点位中误差为0.031 m。高程偏差绝对值最大为0.065 m,最小为0.006 m,平均值为0.025 m,高程中误差为0.032 m。显然,表2中测区4的检查点精度结果优于表1中测区4 的精度,说明机载RTK 定位精度会对航测地形图成果的精度产生显著影响。
当千寻CORS 系统较稳定,机载RTK 的定位精度为2~3 cm 时,再次以千寻CORS 为差分源对测区4 执行航飞作业,此时机载RTK的定位精度与上述自建单基站的方式进行航飞作业时精度相当。统计的7 个检查点的精度。在参与精度统计的7个检查点中:X坐标偏差绝对值最大为0.037 m,最小为0.001 m,平均值为0.020 m;Y坐标偏差绝对值最大为0.035 m,最小为0.003 m,平均值为0.019 m ;X坐标中误差为0.023 m,Y坐标中误差为0.022 m,平面点位中误差为0.031 m。高程偏差绝对值最大为0.054 m,最小为0.006 m,平均值为0.023 m;高程中误差值为0.028 m。以上精度结果与表2的相当,均优于表1中测区4的检查点精度。结果表明:机载RTK定位精度对生成的航测成果精度具有显著影响。
综上所述,当航飞作业过程中机载RTK的定位精度为5~9 cm时,获取的航测成果的精度较低;当机载RTK的定位精度为2~3 cm时,获取的航测成果的精度较高,航测成果的精度与机载RTK的定位精度表现出较强的正相关性。
4 机载RTK定位精度差异分析
无论是连接千寻CORS 方式作业,亦或通过自建单基站的方式作业,其本质均为通过建立载波相位差分方程求解整周模糊度,进而解算机载RTK 实时位置。根据载波相位双差方程联立求解,双差综合误差可简化为:
式中, ∆2Ο 为轨道偏差残余; ∆2Ι 为电离层延迟残余;∆2Τ 为对流层延迟残余;μ与站间距离有关,当距离较短时,这3 项可以忽略不计,但在中长距离动态定位中,这3项误差占据了主导地位,使得定位精度迅速下降[7]。本文实验中的CORS为采用VRS技术的大型网络参考站系统,基准站间距一般长达40~80 km,容易受电离层、对流层残差的影响,比较常见的表现是:在不同纬度地区、同一天不同时间段、西部山区不同海拔高度使用时均存在差异。在电离层活跃的时段及地区,RTK定位精度将显著降低。而自建单基站系统是一种简便快捷的作业方式,可为大疆精灵4RTK 提供差分源。考虑到自建单基站系统作业距离一般不超过2 km,几乎可以忽略电离层、对流层延迟残差的影响,精度相对更稳定、可靠。因此,在执行航测飞行任务时,当机载RTK精度较差时可选择自建单基站方式进行作业。实际航飞作业过程中,应随时监控机载RTK 的定位精度。当RTK 定位精度较低时,应选择合适的定位模式和有利的作业时间进行航测外业,以提高RTK定位精度和测图精度。
5 结 论
本文基于大疆精灵4 RTK无人机,结合实际航测项目详细分析了机载RTK 定位精度对测图精度的影响。结果表明机载RTK定位精度对测图精度的影响显著,因此在执行航测飞行任务时应观察并记录机载RTK 定位精度。当机载CORS RTK 精度较差时,可通过自建单基站方式进行作业,单基站的作业距离控制在2 km以内,以降低电离层、对流层影响对定位结果的不利影响,进而确保地形图的精度;当无自建单基站条件或自建单基站方式作业精度仍然较差时(RTK定位精度不宜低于3 cm),应选择RTK 定位精度较好的时段进行作业,以保证航测成果的精度。本文的研究成果可为无人机免像控作业规范规程的制定提供参考。