带全动翼尖飞翼布局的颤振规律
2024-01-08王伟吉艾新雨
王伟吉, 钱 卫,2,3, 何 翔, 艾新雨, 陈 峥
(1. 大连理工大学航空航天学院, 辽宁大连 116023; 2. 大连理工大学工业装备结构分析国家重点实验室, 辽宁大连 116023; 3. 大连理工大学辽宁省空天飞行器先进技术重点实验室, 辽宁大连 116023)
引 言
随着战斗机的跨代变革, 未来战斗机要求高隐身、 高机动、 轻量化及飞发一体化设计[1]。需要一种新的气动布局形式以适用于此类指标要求, 无尾飞翼布局是一种翼身融合、 无垂尾、 无平尾、 多操纵面的气动布局形式。这种布局的飞机结构简单、 气动效率高、 机动性强及易于机身和发动机一体化。由于无尾飞翼取消了尾翼, 大大减小了雷达反射截面积, 隐身性能强, 而且机翼展弦比小, 降低了跨声速和超声速的零升阻力, 尤其是超声速时激波阻力较小[2-3]。目前大多数人主要热衷于全动翼尖气动特性和操纵特性的研究[4-7],他们认为全动翼尖作为无尾飞翼布局飞行器的横航向操纵面,通常位于机翼外侧,翼尖偏转时阻力增加,作用力臂要比其他操纵面的力臂长,并且无尾布局所需的偏航力矩一般不大,因而全动翼尖具有独特的偏航优势。关于全动翼尖颤振问题的研究,目前很少有人涉及。
根据以往关于全动平尾的颤振研究结果[8-12], 全动平尾与机身之间往往存在一种耦合型颤振, 这种颤振问题严重影响了飞机平尾的结构性能。类比于全动平尾结构, 全动翼尖位于机翼梢部, 通过轴承机构、 舵机机构及舵轴与机翼装配。由于机翼本身的刚度比机身刚度低, 因此机翼提供给全动翼尖的支撑刚度相比于机身提供给全动平尾的支撑刚度更低。因而, 全动翼尖比全动平尾的颤振问题更严峻。
本文采用线性颤振计算法, 进行带全动翼尖无尾飞翼布局的飞机颤振规律研究。与以往研究的机翼弯扭耦合颤振类型不同[13],本文发现的颤振主要是机翼弯曲和翼尖旋转耦合颤振。通过研究发现3种颤振耦合类型, 并对每种颤振耦合类型进行分析, 解释该类型颤振发生的机理, 分析影响颤振的关键结构因素。
1 线性颤振理论
所谓线性颤振法是指结构动力学模型和空气动力学模型均是线性模型。线性颤振计算结果往往是飞行速度超过颤振速度后, 结构振动幅值随时间不断增加。根据相关气动弹性知识, 得到物理坐标的气动弹性运动方程
(1)
其中,M,D,K是线性假设下有限元法分析得到的质量、 阻尼和刚度矩阵。Q(k,Ma,x)是作用于结构上的频域气动力, 其与减缩频率、 Mach数和结构运动有关。
将式(1)进行模态坐标的变换x=Φq, 经过推导得到模态坐标系下动气动弹性方程的一般形式
(2)
采用g法[14]进行颤振分析,g法是一种阻尼扰动法,g法的基本假定是当g≥0和g<0时式(2)中的气动力项满足

(3)
利用阻尼小扰动法[15], 式(3)可以展开为
(4)
将模态位移写为指数函数形式
(5)
其中,γ为瞬态衰减率,b为参考弦长,V为来流速度。将式(4)代入式(2), 可以得到
(6)
这是一个二次特征值问题, 利用数学方法可求解特征根, 特征根的实部表示衰减率, 特征根虚部表示频率。通过迭代计算得到不同来流速度对应的结构阻尼g和频率f值。根据V-g图,g=0的来流速度Vcr为计算的颤振速度,Vcr对应频率为计算的颤振频率, 其中下标cr表示临界值。
2 线性颤振分析
从数学角度, 颤振求解本质上是一种研究二次方程的特征值问题, 而解这种特征值问题不是在物理坐标系下考虑的, 而是在模态坐标系下。与特征根息息相关的是模态矩阵、 模态阻尼和模态刚度等, 换言之, 与结构的动力学特征相关。结构的纯模态(弯曲、 扭转、 旋转及高阶弯曲和扭转等)按照模态频率从小到大依次排列, 由于式(6)中的特征值虚部表示频率, 因此结构纯模态的阶数是按照特征值的虚部进行由小到大依次排序。当来流速度为0时, 结构的振动模态是结构的固有特性; 但当流速增加, 结构的振动模态会发生变化, 流速会使得容易发生振动形态耦合的纯模态频率逐渐开始靠近。流速越大, 流固耦合性越强。由此可见, 颤振分析过程中, 需要一种技术针对各阶模态进行跟踪, 即模态跟踪技术。
本文采用g法的模态跟踪技术研究带全动翼尖无尾飞翼布局的颤振机理。
2.1 颤振特性
采用有限元法计算结构动力学特性, 得到了全动翼尖无尾飞翼布局飞机的前30阶模态特性(见表1)。进行无尾飞翼布局飞机的全机颤振特性分析。根据g法计算的颤振结果(见图1), 该飞机的颤振穿越阶主要有全动翼尖反对称旋转(模态11)、 全动翼尖对称旋转(模态10)和机身一弯(模态9)。全动翼尖(all-moving wing tip, AMT)反对称旋转对应的颤振速度为253 m/s, 颤振频率为9.72 Hz; 全动翼尖对称旋转对应的颤振速度为272 m/s, 颤振频率为 10.02 Hz; 机身一弯对应的颤振速度为 306 m/s, 颤振频率为7.78 Hz。根据表2模态跟踪结果, 全动翼尖反对称旋转模态穿越对应的颤振特性中, 机翼反对称一弯(模态8)和全动翼尖反对称旋转(模态11)的模态参与度最高; 全动翼尖对称旋转模态穿越对应的颤振特性和机身一弯穿越对应的颤振特性中, 机翼对称一弯(模态7)、 机身一弯(模态9)和全动翼尖对称旋转(模态10)的模态参与度较高。
桩号为K35+192的大断面,边坡系数1,水流流向与岸坡交角15°,局部流速2.9m/s,求得局部冲刷深度1.69m,护脚长度的选取为3倍局部冲刷深度进位取整,计算护脚长度5.07m,进位取整为6m。
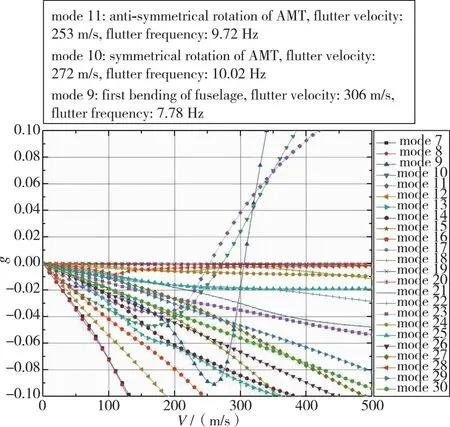
(a) V-g
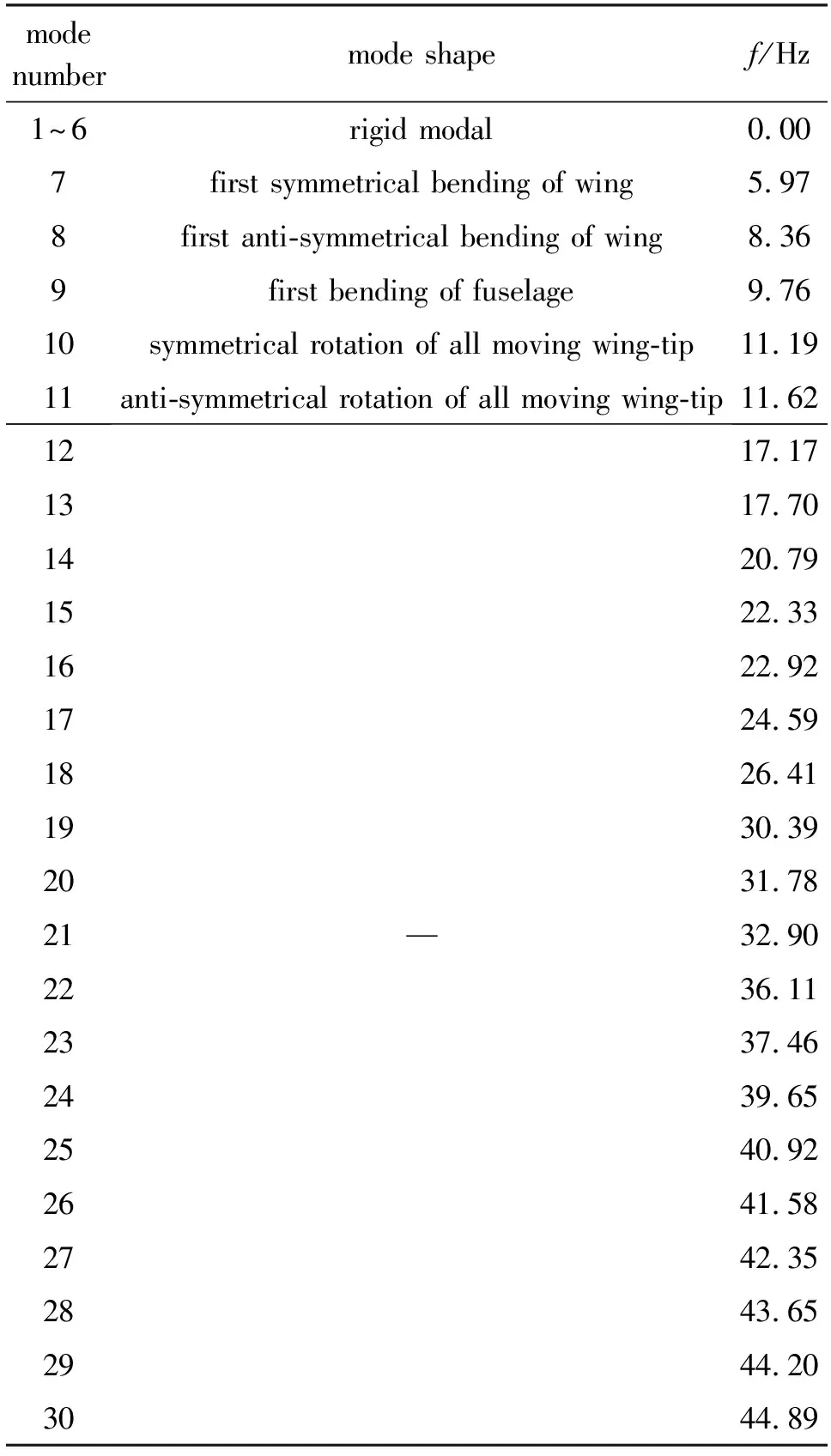
表1 无尾布局飞机的模态频率

表2 全机颤振的模态跟踪结果
综上, 无尾飞翼布局飞机的颤振特性主要与机翼弯曲模态、 机身弯曲模态和全动翼尖旋转模态相关, 下文将对3种颤振类型分别展开研究, 从而确定无尾飞翼布局飞机的颤振耦合机理。
2.2 对称耦合型颤振
根据有限元法计算的结构动力学特性, 得到了全动翼尖无尾飞翼布局飞机的模态特性。机翼对称一弯的模态频率为5.97 Hz, 全动翼尖对称旋转的模态频率为11.19 Hz。模态振型见图2和图3。

图3 全动翼尖对称旋转(f=11.19 Hz)Fig. 3 Symmetrical rotation of AMT (f=11.19 Hz)
仅考虑对称模态作用下的颤振特性, 针对机翼对称一弯和全动翼尖对称旋转2阶模态进行颤振分析。根据计算结果(见图4), 其颤振速度为 310 m/s, 颤振频率为8.73 Hz。在多阶模态分析的颤振结果中(见图1), 全动翼尖对称旋转模态对应的颤振速度为272 m/s。与2阶模态的计算结果相比, 多阶模态的颤振速度降低12%。

(a) V-g
特征根的实部表示瞬态衰减率, 它是结构阻尼的1/2, 根据g法基本理论, 当g=0时, 结构振动为等幅振荡。随着来流速度的增加, 机翼对称一弯模态对应的特征根实部逐渐减小, 且g一直小于0, 而全动翼尖对称旋转模态对应的特征根实部先减小后增大, 且g先小于0, 后大于0, 当来流速度为310 m/s时,g=0, 此时结构振动为等幅振荡。特征根的虚部表示频率, 随着风速的增加, 机翼对称一弯对应的特征根虚部上升缓慢, 而全动翼尖对称旋转对应的特征根虚部下降较快, 这说明机翼对称一弯和全动翼尖对称旋转2阶模态存在颤振耦合作用, 并且在耦合过程中全动翼尖模态起到主要作用。结构在等幅振荡时, 全动翼尖对称旋转模态100%参与振动, 而机翼对称一弯参与较小, 仅占7.5%(见表3)。由此说明引起颤振的主要原因是全动翼尖结构。

表3 对称耦合型颤振的模态跟踪结果
根据模态振型, 机翼对称一弯的振型节线靠近翼根, 机身一弯的振动幅值远低于机翼一弯的振动幅值, 因此振动过程中主要是机翼的弯曲刚度起到弹性恢复力作用。全动翼尖旋转的振动节线在其旋转轴附近, 振动过程中主要是操纵系统的动刚度起到弹性恢复力作用。因此, 机翼的弯曲刚度和操纵刚度在结构颤振中起到主要作用, 而且全动翼尖的操纵刚度肯定会显著影响其颤振速度。
2.3 反对称耦合型颤振
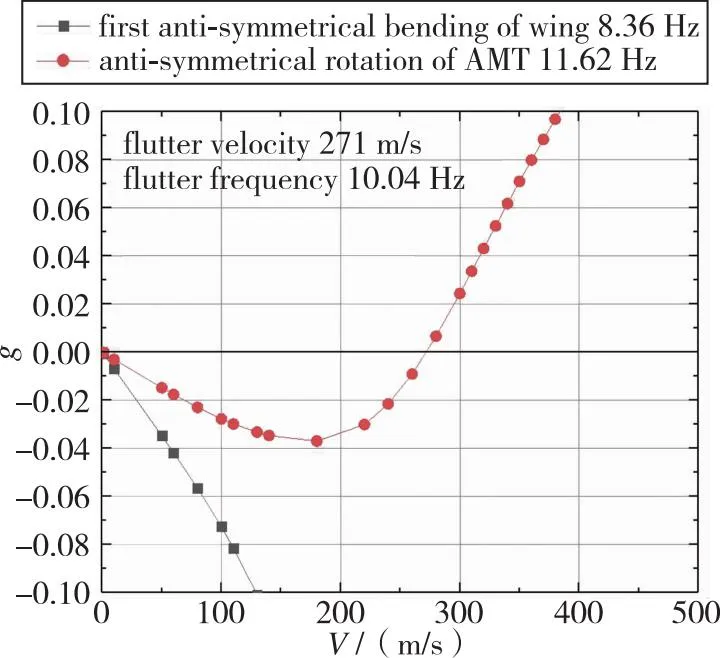
根据模态分析结果, 机翼反对称一弯的模态频率为8.36 Hz, 全动翼尖反对称旋转的模态频率为 11.62 Hz。模态振型见图5和图6。
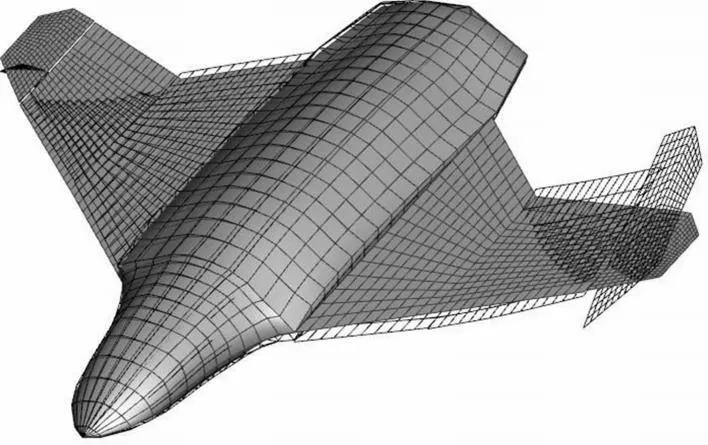
图5 机翼反对称一弯(f=8.36 Hz)Fig. 5 First anti-symmetrical bending of wing(f=8.36 Hz)

图6 全动翼尖反对称旋转(f=11.62 Hz)Fig. 6 Anti-symmetrical rotation of AMT(f=11.62 Hz)
研究在反对称模态下的颤振特性, 针对机翼反对称一弯和全动翼尖反对称旋转2阶模态进行颤振分析。根据计算结果(见图7), 其颤振速度为271 m/s, 颤振频率为10.04 Hz。在多阶模态分析的颤振结果中(见图1), 全动翼尖反对称旋转模态对应的颤振速度为253 m/s。与2阶模态的计算结果相比, 多阶模态的颤振速度降低7%。
(a) V-g

表4 反对称耦合型颤振的模态跟踪结果
根据模态振型, 机翼反对称一弯的振型节线接近机翼中部, 且机身扭转振动参与了反对称一弯振动, 因此振动过程中主要是机翼的弯曲刚度和机身的扭转刚度起到弹性恢复力作用。考虑到机身有滚转振动, 机翼反对称旋转频率也会受到机身转动惯量的影响。全动翼尖反对称旋转的振动节线在其旋转轴附近, 振动过程中主要是操纵系统的动刚度起到弹性恢复力作用。因此, 机翼弯曲刚度、 机身转动惯量和操纵刚度在结构颤振中起到主要作用, 而且全动翼尖的操纵刚度肯定会显著影响其颤振速度。
2.4 机身参与的颤振型
机身的振动过程往往伴随着机翼、 尾翼、 舵面及弹体等结构的振动模态。在模态分析过程中, 常见的现象有机身与其他结构部件振动模态相似的情况, 这就容易导致工程师或研究者在判别颤振耦合类型过程中出现失误。机身的振动经常会参与到其他部件的颤振形态中。无尾飞翼布局飞机的机身一弯模态伴随机翼弯曲和全动翼尖旋转模态。因此, 有必要将机身参与的颤振问题分解为机身一弯和机翼对称一弯、 机身一弯(见图8)和全动翼尖对称旋转两种耦合作用的颤振问题。

图8 机身一弯(f=9.76 Hz)Fig. 8 First bending of fuselage(f=9.76 Hz)
机身一弯和机翼对称一弯耦合作用下, 随着来流速度增加, 机翼对称一弯对应的特征根实部逐渐减小且g始终小于0, 而机身一弯对应的特征根实部呈先缓慢下降后急剧上升趋势,g=0时, 对应的颤振临界速度为373 m/s(见图9)。在多阶模态分析的颤振结果中(见图1), 全动翼尖反对称旋转模态对应的颤振速度为306 m/s。与2阶模态的计算结果相比, 多阶模态的颤振速度降低18%。

(a) V-g
机翼对称一弯对应的特征根虚部上升而机身一弯对应的特征根虚部下降, 两者变化的趋势相当, 这就说明在机身和机翼耦合颤振过程中, 2阶模态的作用效果基本相同。然而, 根据模态参与度来看(见表5), 机身一弯模态起到主要作用, 这是因为机身一弯振动过程中, 伴随着较大振幅的全动翼尖对称旋转模态。

表5 机身一弯和机翼对称一弯颤振模态跟踪结果
机身一弯和全动翼尖对称旋转耦合作用下, 来流速度增加, 流速增大, 机身一弯和全动翼尖对称旋转的特征根虚部发生了“模态交叉”现象, 这就导致模态分支的“串支”出现。这也说明, 在这种耦合型颤振过程中, 很可能出现穿越的是全动翼尖对称旋转而不是机身一弯。
采用“串支修正”方法, 将图10修正为图11状态。机身一弯模态对应的特征根实部下降且g始终小于0, 而全动翼尖对称旋转的特征根实部先下降后上升,g=0时, 颤振速度为267 m/s。从而说明影响颤振振型的主要还是全动翼尖旋转模态。根据模态参与度来看(见表6), 起主要作用的仍然是全动翼尖旋转。

(a) V-g

表6 机身一弯和机翼对称一弯颤振模态跟踪结果
根据模态振型, 机身一弯的振型节点接近机翼根肋前缘点和根肋后缘点(不包括机翼后侧的操纵面), 并且振型节线呈不规则状, 其涵盖了机翼后缘全部及全动翼尖旋转轴。机身一弯模态振动过程中, 涉及机身的弯曲刚度、 机翼的弯曲刚度和全动翼尖旋转刚度。而机身一弯振动时, 全动翼尖旋转振型较机翼一弯振型明显, 也就是说机身一弯模态更容易与全动翼尖旋转耦合, 发生颤振问题。从两者的颤振速度来看, 机身一弯和全动翼尖旋转耦合型颤振速度更低, 进一步说明机身一弯和全动翼尖旋转耦合颤振更容易。
2.5 全动翼尖旋转频率对颤振速度影响规律
以上文研究的颤振为基准, 研究不同全动翼尖旋转频率下的颤振速度和颤振频率变化规律。首先计算全动翼尖在不同等效操纵刚度下, 机翼对称一弯、 机翼反对称一弯、 机身一弯、 全动翼尖对称旋转和全动翼尖反对称旋转频率的变化规律。图12中, 刚度系数是指不同操纵刚度相对于基准颤振对应的等效操纵刚度的比例系数。随着全动翼尖操纵刚度增大, 全动翼尖对称和反对称旋转频率明显增加, 而机翼对称一弯、 机翼反对称一弯和机身一弯的模态频率变化幅度较小。全动翼尖对称旋转频率和反对称旋转频率始终相近, 变化趋势一致, 因此可以统称为全动翼尖旋转频率。

图12 不同等效操纵刚度下的各阶模态频率Fig. 12 Different frequencies of variable control mechanism
为了区别全动翼尖旋转频率对3种颤振耦合类型的影响效果, 本文分析了不同全动翼尖旋转频率下的对称耦合型、 反对称耦合型和机身参与颤振型的颤振特性(见图13)。通过研究发现, 当全动翼尖旋转频率低于机翼对称一弯频率下边界时, 对称耦合型颤振不存在了; 当全动翼尖旋转频率低于机翼反对称一弯频率上边界时, 反对称耦合型颤振不存在了; 机身参与颤振型自始至终存在。这在多阶模态颤振分析的结果中得到验证, 当全动翼尖旋转频率低于机翼弯曲频率下边界时, 机身参与颤振的颤振结果与多阶模态颤振结果基本一致; 当全动翼尖旋转频率高于机翼弯曲频率上边界时, 多阶模态颤振速度是3种耦合型颤振中最低的, 这说明其他模态的参与对颤振速度起到了负面影响。

图13 不同全动翼尖旋转频率下的颤振速度Fig. 13 Different flutter velocities of variable AMT rotation frequencies
3 结论
本文针对带全动翼尖的无尾飞翼布局飞行器进行了颤振规律研究, 采用模态跟踪技术, 研究不同模态组合下的颤振机理。通过研究发现, 该飞机存在3种耦合类型: 机翼对称一弯和全动翼尖对称旋转耦合型、 机翼反对称一弯和全动翼尖反对称旋转耦合型及机身模态参与的耦合型。研究这3种耦合型颤振, 可以得到以下结论:
1) 3种耦合型颤振中, 全动翼尖的旋转模态均参与了颤振, 从模态参与度来看, 3种颤振结果中全动翼尖的参与度均为100%, 即全动翼尖结构的存在是导致该布局飞机发生颤振的内因。
2) 反对称耦合型颤振速度低于对称耦合型颤振, 从模态频率角度分析, 全动翼尖反对称旋转与机翼反对称一弯的频率比低于全动翼尖对称旋转和机翼对称一弯的频率比。从模态振型来看, 机翼反对称一弯振型中存在全动翼尖反对称旋转模态, 而机翼对称一弯却没有全动翼尖的旋转模态参与, 也就是说反对称耦合型颤振更容易发生。
3) 相较于反对称耦合型颤振, 机身参与的颤振耦合型中, 机身一弯和全动翼尖对称旋转的颤振速度更低, 这主要是因为机身一弯频率更接近全动翼尖对称旋转, 并且机身一弯振型中本身也存在了全动翼尖的旋转模态。
4) 除了全动翼尖参与的颤振耦合过程外, 机翼对称一弯和机身一弯也存在耦合作用, 这与常规的小展弦比飞机发生颤振问题的情况类似。但是, 全动翼尖的存在会严重降低无尾飞翼布局飞机的颤振边界。
5) 影响对称耦合型颤振的主要结构因素有机翼弯曲刚度和全动翼尖旋转刚度, 而影响反对称耦合型颤振的主要有机翼弯曲刚度、 机身转动惯量和全动翼尖旋转刚度。
总之, 带全动翼尖的无尾飞翼布局飞机的颤振是由全动翼尖的结构振动引起的。而造成颤振的最根本原因还是机翼的弯曲刚度和全动翼尖的旋转刚度。