机载LiDAR技术在城市地下排水渗漏检测中的应用
2024-01-08修明军孙傲丁鸽
修明军,孙傲,丁鸽
(济南市勘察测绘研究院,山东 济南 250000)
0 引 言
由于城市化发展越来越完善,人们生活质量水平也逐渐提高,地下排水管道体系已经与人们的生产生活密不可分。而排水体系位于地下,在安装、维护、检修等工作环节中都存在一定难度,因此也容易出现管道破损断裂等问题。管道破损会导致水流渗漏,同时管道内水压发生变化,很容易造成大范围的系统瘫痪,不仅会影响当地的正常生活,还会造成大量的水资源浪费。而土壤含水量增加也会对地表建筑物产生不利影响,路面沉降、楼体下陷等安全问题频发,严重影响社会和谐稳定。为了更好地解决以上问题,在施工前对施工区域进行全面具体的勘测十分必要。
针对地下水管道勘测问题,文献[1]利用深度学习模型对地下排水管道缺陷进行检测识别,将缺陷检测功能与管道运行流程相结合,能够及时检测出管道中的异常问题,并快速自动生成异常报告,智能高效,但无法监测出破损区域对周边的影响情况。文献[2]基于卷积神经网络技术对排水管道视频图像进行智能识别,精准识别出管道图片存在差异变化的区域,并通过神经网络算法得到准确的故障位置,但这种方法测距较短,应用范围有限。
机载LiDAR技术是通过利用探测定位设备获取目标数据,基于数理分析对数据进行优化,获得目标区域三维数据模型的一种测量方式,其测距能够达到 3 m~500 m,满足一般地下排水管道勘测的基本需求。因此,本文对机载LiDAR技术在城市地下排水渗漏检测中的应用效果进行了研究分析。
1 地下排水管道探测
1.1 机载LiDAR技术探测原理
机载LiDAR技术的拓扑结构一般由主服务器、信号传感器和信息显示器构成。信号传感器主要包括信号发射传感器和接收传感器,对地下水管道进行勘测需要采用收发一体LiDAR传感结构。发射传感器通过天线将信息转化为电磁波,被接收传感器的天线所接收,没有接收识别到的电磁波再次向下辐射到达更深的层次折射返回,如此循环往复,直到所有发射出的电磁波被地下目标介质吸收,地表和地下介质的电导率和介电常数相差越大,电磁波的反射越强[3]。机载LiDAR技术探测方式如图1所示:

图1 机载LiDAR技术探测方式
根据图1进行测试,机载LiDAR探测会根据规划好的路线进行扫描探测,有监测器测量并记录仪器扫描移动的距离,探测器每隔一段距离会进行一次电磁波信号交换,反射信号接收点在一条探测线上,各探测点所采集到的信息数据通过波形堆积传输导入到主机系统中,形成探测所得的信号分布灰度显示图,即为二维工程信息探测剖面[4]。灰度显示图中可以直观地呈现不同位置信号反射的频率、振幅、走向等信息,工作人员根据所得信息可对地下目标对象的位置、形态、变化情况进行基本判断认定[5]。
1.2 介电常数探测
对地下水管道进行探测最主要的工作是对管道线路分布以及管道渗漏情况进行监察探测。通常情况下地下水管道发生渗漏,周边的土壤含水量会随之增加,而土壤含水量的增加则会导致土壤的介电常数以及导电率发生变化,LiDAR探测器向地下发射电磁信号,在触及含水量较大的土壤时进行反射,将采集到的探测目标介质的介电常数和导电率传输给主系统,通过主机系统运算判断其是否达到异常标准,其计算公式如下:
β=3.3+9.8μ+146.7μ2-76.2μ3
(1)
式中,β为探测目标介质的介电常数,μ为介质探测范围内的体积含水量。信息传输过程中传播速度会受到环境影响导致信息不完整,因此需要结合电磁波速与介电常数对探测信号反射速度进行还原优化。
(2)
其中,vd表示地下信号反射电磁波速,V表示真空光速,作为运算参考的标准速度,此时反射信号波速与介电常数的算术平方根成反比。
如果地下水管道破损渗漏,土壤的介电常数增加,信号探测波速会随之减小,与非渗漏区域的土壤介电常数呈现明显差异,更容易被探测电磁波所发现,并反射给地表信号接收器[6]。
1.3 地下排水管道探测反射检测
地下排水管道探测反射原理如图2所示:

图2 地下排水管道探测反射原理
观察图2可知,机载LiDAR探测技术主要依靠数理运算来达到测算目的。数理运算最基本的任务是数据采集,其操作方法一般通过控制传感天线,将辐射电磁波沿着探测线方向进行线性探测,传感天线极化方向不能与地下探索目标的走向相垂直,否则电磁信号无法进行波动反射,难以实现信息传输的效果。以二维剖面为参考,在与目标对象大致位置倾斜45°左右的位置安置探测装置,电磁波辐射向下发射并在目标物处反射回地表,形成一个双程走向的信号路径,路径与传感天线的关系用公式来表达为:
(3)
其中,t表示电磁信号传播的双程路径传输时间,v为信号电磁波传播速度,m表示的是传感天线顶端的深度,p代表天线所在的水平位置。
2 排水管道位置检测
2.1 数据采集与整理
通过二维探测剖面显示图划分探测线上的探测点位置。相邻探测点间距需小于电磁波最小反射波长的四分之一,将数据整合为一个剖面数据集,将所有探测线的二维剖面图进行整合,在主机系统中进行数据建模。通过切片法将二维剖面数据进行提取,对水平切片和垂直切片进行分类,每个探测点的数据导入建模系统构建三维探测模型,根据模型信息探测系统控制器能够对探测器进行基本的操作控制[7]。
机载LiDAR探测技术的数据采集主要通过剖面法进行数据测量。传感器采集到的数据信息会及时传输到主机数据处理器中进行分析整理,根据数据来源、时间、位置分门别类归入对应的数据集合中,便于运算程序对数据信息进行处理[8]。
2.2 排水管道线路模型
基于上述数据采集与整理的结果,可以对地下排水管道线路基本情况进行模型构建。首先,确定地下探测基本点坐标位置,地表探测传感器所在位置,划分探测器移动的测量线路径;其次,将探测仪器每次移动的关节点进行标记,形成探测区域地下水管道线路现状剖面图,针对探测信号反射区域异常介质形态的判断,可通过运算程序进行初步分辨:
(4)
式中,S表示探测目标与传感器天线之间的距离,x为LiDAR探测器所在位置坐标,b代表目标物体所在位置坐标。结合探测信号双程传播时间:
(5)
其中,T表示探测信号来回一次的传播时间,v表示该区域地下电磁波传播速度。结合上述两公式,消参可得目标对象表面形态基本图像方程:
(6)
由公式(6)计算得出抛物线图像,可知目标物体外部形状的基本情况,包括最顶点位置坐标、两侧横向距离等多方面信息[9-10]。
2.3 信号偏移校正
在探测过程中可能存在信号偏移现象,也就是探测电磁波受到途中某种特殊介质影响发生散射,所以反射回地表的信号存在一定程度的偏移[11-13]。因此需要对偏移数据进行校正处理:
(7)
A=(x2+y2-z2)1/2
(8)
其中,α(x,y,z)表示正确路径下目标物体所在位置坐标;△x,△y分别表示水平方向和垂直方向测线每个节点之间的间距;ε表示探测电磁波辐射半径;A为实际电磁波路径与纵向测线之间的夹角;φ表示的是实际探测电磁波的幅度。由此计算能够得到纠偏后的信号反射路径和正确的信号接收点位置[14]。
最后,为了保障地下水管道探测与检修过程的顺利,需要精确物体实际所在位置信息,对探测所得信息图像进行分辨率优化,使数据更符合实际情况。
(9)
(10)
其中,Qw,Ql分别表示水平和垂直方向的分辨率,r表示探测目标对象所在位置的深度,δ代表探测信号电磁波的波长。由此可以将探测数据精确到实际尺寸范围,提高监测的精准度[15]。
3 现场模拟
为了更具体地研究机载LiDAR技术在城市地下排水渗漏检测中的应用效果,本文以某地区地下排水管道为研究对象进行了探测实验。现场地质环境如图3所示:
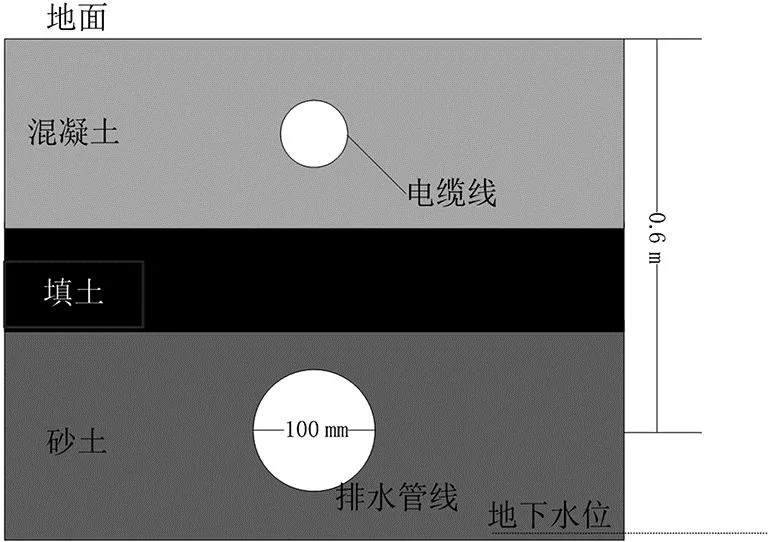
图3 现场地质环境
该区域为地下排水管道渗漏的某市区工厂,据了解,排水管道直径 100 mm,埋深为 0.6 m,材质是铸铁管道,内部水压长期稳定为 220 kPa,该管道所在土壤层面为地下水所在的砂土层,管道介于地下水和砂土表层之间;再往上是人工填埋的填土层,最上面是铺设有电网电缆的建筑物地基混凝土层;目标管道穿过一个竖井。
当阀门打开时,排水管道开始工作,水流以稳定水压经过该管道,而该管道由于长期使用未进行保养,出现了破损,水流经过时会由于水压在该破损处形成渗漏,渗出的水会慢慢填满整个竖井,竖井无法做到完全防水,而土壤具有较大的吸水性,所以该竖井周围土壤的含水量会逐渐增大。
进行实验时,阀门应处于关闭状态,首先要采集管道正常情况下的土壤含水量,根据土壤含水量变化判断土壤的介电常数是否存在异常;然后打开阀门,让破损管道渗漏出的水流填满竖井,大约半个小时后关闭;再使用同样的探测方法对渗漏区域进行探测。机载LiDAR探测过程如图4所示:

图4 机载LiDAR探测过程
本文基于实验管道的位置选用了垂直于管道方向的剖面探测方法,探测目标管道位于网络的中心位置。实验采集设备为MD4-3000无人机,搭载RIEGL VUX-3雷达系统,飞行高度约 120 m,飞行速度为 12.5 m/s,飞行总面积 0.43 km2。在传感器规格选择方面,充分考虑了管道的深度和属性,选用了信号频率为 200 MHz的传感天线和 500 MHz的屏蔽天线,通信网络为以太网,速度为 100 M/s,在探测网络内共设置采样节点500个,通过16位数据4次叠加分别对正常状态下和渗漏情况下的管道进行信息探测和数据采集。测线布置方式如图5所示:
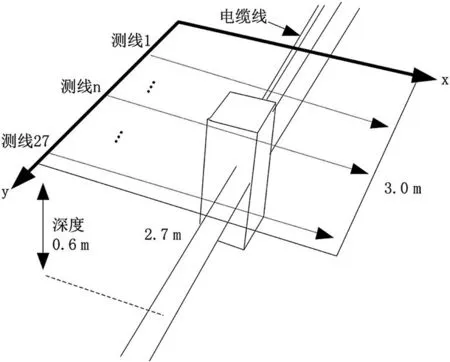
图5 测线布置方式
在数据采集过后将两类数据分别整理在对比样本数据集合中,分别进行数据优化处理。为了提高数据的精准度,需要提高采集到的各项数据信噪比,并对目标管道反射信号数据进行辨识度优化。根据环境特征,本文对信号数据进行了降噪、零时校正、信号纠偏、线性增益和滤波处理,信号处理流程如图6所示。

图6 信号处理流程
(1)降噪。取所有信号数据的平均值,再从每项数据中减去平均值来达到去除干扰因素的目的。
(2)零时校正。主要针对探测信号存在的延时问题进行校正,使地表接收反射信号基本处在零时刻。
(3)偏移纠正。分别对二维剖面和三维剖面数据进行对比分析,识别电磁波信号偏移情况,对结合电磁波传输速度进行纠偏。
(4)线性增益。针对探测信号传播过程中存在的散射和耗损问题,为了得到更清晰准确的探测数据,通过线性增益对探测信号衰减幅值进行补偿。
(5)滤波处理。通过滤波装置对接收到的信号中高频或低频的电磁波进行过滤,提高反射电磁波信号数据的准确性。
4 勘测结果分析
本实验分别对偏移前和偏移后的信号探测二维剖面图进行了对比分析。渗透结果如图7所示:
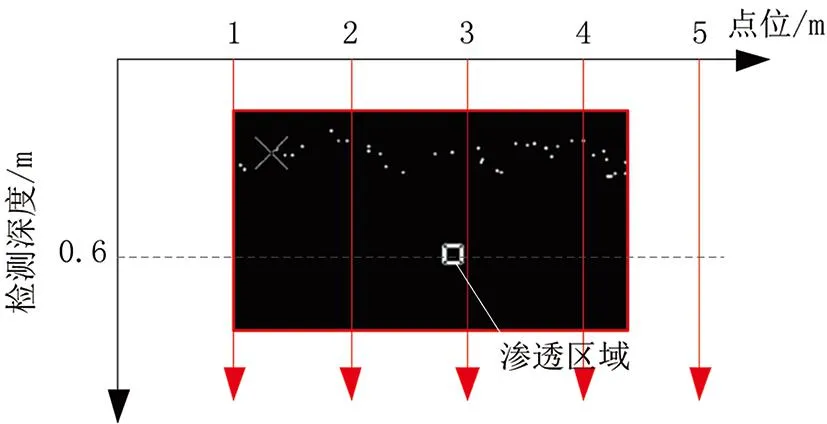
图7 渗透检测实验结果
对于偏移前的二维探测剖面图,选取了五条具有代表性的探测线进行测量,根据测量结果可确定渗透位置约为地下 0.6 m处。机载LiDAR检测结果如图8所示。

图8 机载LiDAR检测结果
局部雷达图像如图9所示:

图9 局部雷达图像
根据传输回的信息数据可以看出,距离渗漏区域距离较远的探测线在渗漏前和渗漏后并无明显变化,基本可以确定该位置并未受到渗漏问题影响。位于渗漏区域正上方的探测线在渗漏前后有明显的数据变化,探索信号在到达该区域时有强烈的反射信号,并受到了周边环境的干扰产生偏移等问题,则可以判定这些变化是由于管道渗漏造成的,而且通过竖井左右两侧反射信号的波动幅度,能够更准确地推测出渗漏的主要方位。
在对数据进行纠偏处理后,得到偏移后的二维探测剖面图,消除了由于散射效应导致信息偏差等问题,得到更贴近现实的渗漏后探测信号反射数据。探测信号渗漏区域反射数据实验结果如图10所示:
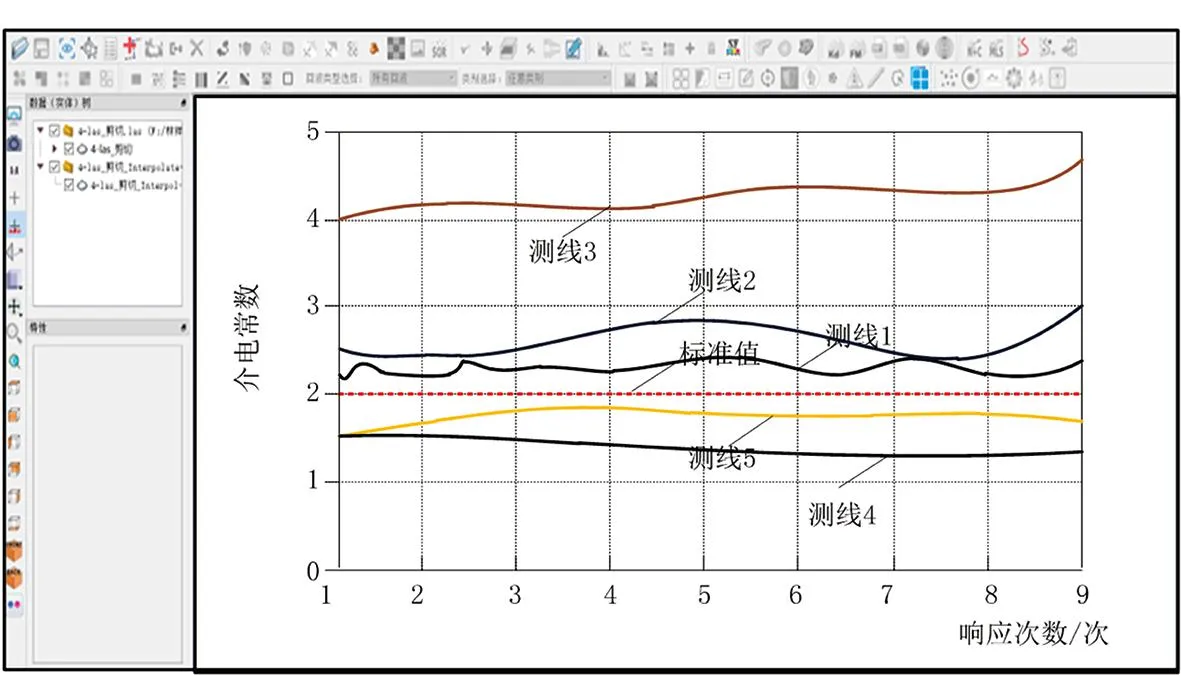
图10 探测信号渗漏区域反射数据实验结果
观察图10可知,渗漏区土壤含水量增大后,土壤的介电常数增大,对于探测电磁波的反射能力更强。同时渗透管道位置的信号数据曲线有了更明显的聚焦,可确定渗透位置约为地下 0.6 m,与实际渗漏区域位置相吻合。
二维图像分析主要选取了典型的探测线数据。为了得到更全面的探测结果,需要进行三维图像模型构建。三维图像模型如图11所示:

图11 三维图像模型
分别将水平方向与垂直方向探测线剖面切片数据导入建模程序,综合各方位数值构建出比例相一致的地下排水管道实况模型,存在异常变化的数据相互结合,渗漏变化区域更加具体明显,不仅能够确定渗漏位置的深度,还能分辨出基本的水平方位。由此可见机载LiDAR技术的勘测能力更强,探测结果也更为精准,在城市地下排水渗漏检测中能够发挥更好的效果。
5 结 论
本文对机载LiDAR技术在城市地下排水渗漏检测中的应用效果进行了研究,并得出以下结论:
(1)机载LiDAR技术能够精准具体地确定管道故障区域位置,并对管道周边受影响情况也有全面地反映。同时针对环境干扰因素有对应的解决措施,最终所得数据相比传统勘测技术所得数据更加精准。
(2)该方法注重数据分析和模型构建,所反映结果相较于图像分析更加明显,且对设备要求并不高,成本较低,适用性广,能够更好地满足当前城市地下排水管道勘测需求。
由于本文主要是对管道渗漏情况进行的探测实验,没有充分考虑管道其他未渗漏破损情况,在未来应进一步针对管道老化、位移等故障问题勘测技术进行研究完善。
