基于三维激光点云的道路参数化建模方法
2024-01-08祖帅
祖帅
(福州市勘测院有限公司,福建 福州 350108)
0 引 言
近年来,众多城市开始推进新型城市基础设施建设,实施智能化市政基础设施建设和改造。道路三维模型结合属性信息可以在规、建、管全生命周期管理中发挥重要作用,是新城建的重要建设内容,也是数字孪生城市和智慧交通建设的基础数据[1]。
传统道路三维建模主要是根据道路平面、纵断面、横断面等资料,利用计算机手工构建道路三维模型。随着道路数据信息不断丰富,道路三维建模方法也发生变化。李晓丽[1]等利用高精度矢量数据自动构建路面三维模型;汤圣君[2]等提出利用三维GIS数据实现道路参数化建模方法;高阳[3]等通过点云扫描强度值与强度差值提取道路标志线信息,创建道路三维模型;张慧智等[4]提出基于车载激光点云的三维道路精细化建模。
本文通过分析道路空间特征和数据结构,根据三维激光点云提取道路矢量和参数信息,对路面和地物建模进行算法设计,实现基于点云数据的道路路面和地物参数化三维建模。
1 道路三维模型数据结构设计
从道路空间分布特征角度,道路由路面、标线、设施、景观绿化等要素构成。考虑道路要素空间结构、拓扑关系和几何特征,本文将道路三维模型数据结构分为点状物和体状物两类数据结构:空间体、空间点,如图1所示。

图1 道路三维模型数据结构
2 道路参数化建模原理
参数化建模是将三维模型不同构件通过合理方式分离出来,将几何特征、位置特征等映射为变化量参数[5],通过控制参数实现模型大小、位置的变化。道路参数化建模可以通过建立道路模型库,用参数和算法驱动模型库自动建模[6]。该方法借鉴了3DGIS和BIM两类数据模型的几何、语义信息融合和数据集成[7]。
道路模型库是参照BIM族库的理念,采用构件承载各类几何和非几何信息的常用模型单元,如灯杆、树木、支挡防护等地物,通过定义构件参数信息建立起可用算法驱动变化的道路模型库[8-9]。
道路参数信息是通过提取道路的类别信息、几何信息、坐标信息等,作为道路参数化建模的参数信息。例如,可根据道路直线、曲线要素提取关键位置参数,用于路面平面参数化建模,结合道路表面高程信息、道路厚度信息,实现参数信息驱动道路面层三维建模。同理,树木、路灯、信号灯等点设施,可以直接根据类别参数、几何参数、坐标参数等自动化建模。
3 道路三维模型参数化建模实现
道路参数化三维建模流程如图2所示。
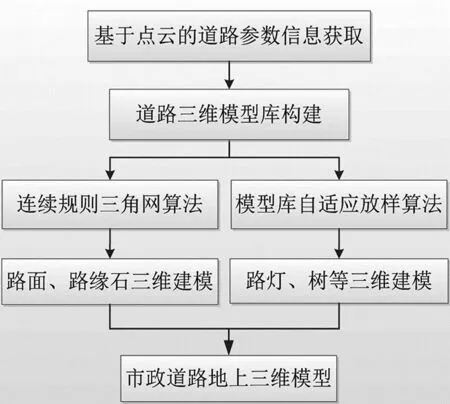
图2 道路参数化三维建模流程
3.1 道路参数信息获取
道路参数信息采集可以利用传统的测量技术,如全站仪、GNSS+RTK等方式,也可以采用如无人机倾斜摄影测量、三维激光扫描等技术。相比其他测量手段,车载移动三维激光扫描以全息采集的方式,有精度高、速度快、可视化效果好、易于解析等优点,是新型基础测绘典型的数据采集技术手段。车载激光移动测量系统是以小型汽车/摩托车为载体、多传感器集成的测量系统。一般由三维激光扫描仪、全球定位导航系统(GNSS)、惯性导航系统(INS)、CCD相机、里程计(DMI)、时间同步控制器等传感器组合构成[3]。
面向三维建模的道路参数信息获取,首先需要对点云数据经过点云数据解析、导航数据结算、点云滤波、去噪、抽稀、分类、渲染等步骤,获取三维真彩点云[10],之后在采集软件中实现半自动化提取道路矢量信息、位置参数、几何参数、纹理等信息。
3.2 道路模型库建设
道路模型库是通过一系列参数定义三维模型,参数保存了地物类别信息、几何信息和坐标信息[11]。因此,在制作地物模型库时,需要针对模型相应的使用目标,在制作过程中设置相应的参数信息,以便在之后建模过程中实现参数驱动建模,从而提高建模和应用的效率[12]。
根据上述道路地物建模规则和建模对象的实际形状,利用Revit软件和二次开发工具设计并创建了道路常用地物标准模型库,模型的长、宽、高、位置和方向受控于所创建的几何参数,可根据实际情况改变;模型纹理采用自制贴图,可在常用三维建模软件和平台中无丢失流转,如图3、图4所示。
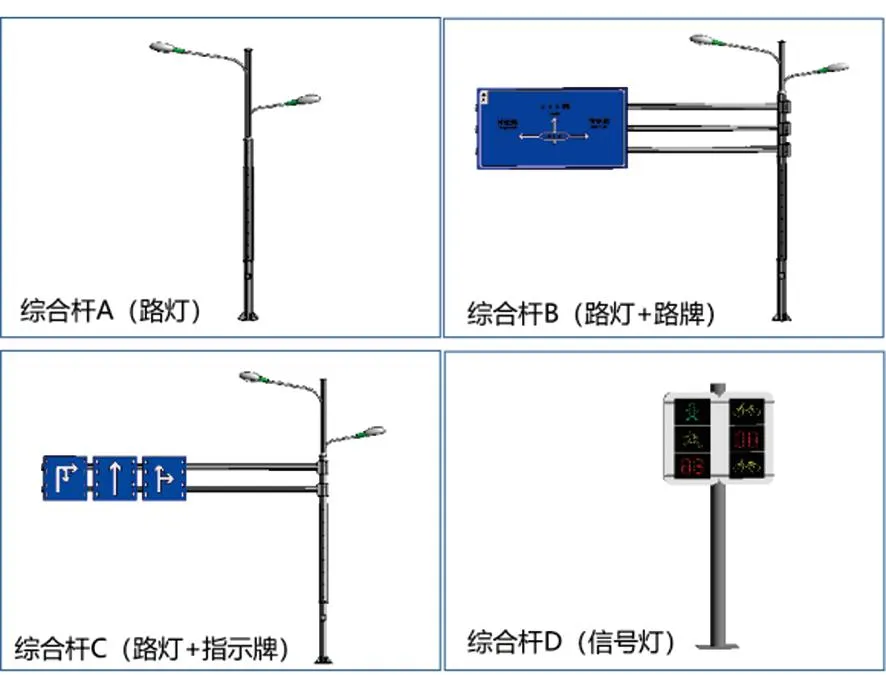
图3 典型地物模型库示意
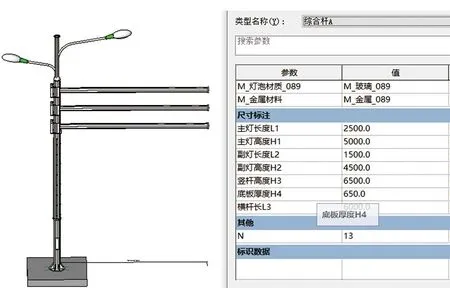
图4 典型地物模型参数示意
3.3 路面参数化建模算法
道路路面是由一系列关键节点连接而成的连续实体,关键节点直接控制着道路的形状、位置,是三维重建和空间分析的基本要素[13-14],通过提取道路边线关键节点,设计连续规则的三角网算法,可以满足路面快速建模。根据三维激光点云数据可以提取道路直线、曲线要素,并且在直/曲线要素的基础上按照规则的间距加密三维特征点。在Microstation V8软件中通过约定三角网底边关键点参数、设计规则三角网算法,自动构建连续规则三角网,在此基础上利用3DMAX/Revit软件生成表面模型,纹理贴图后生成路面三维模型。
例如,Z(1)、Z(2)…Z(n)点连接成道路直线,直缓点ZH、缓曲点HQ、曲中点QZ、曲缓点QH、缓直点HZ等参数构成道路的曲线要素,根据定义规则间隔的直线要素和曲线要素,在Microstation V8软件中利用三角网算法,自动构建底边长相同的连续规则三角网、生成DSM,进而在3DMAX/Revit软件中经纹理参数识别、纹理映射后快速实现道路路面的三维建模,如图5所示。

图5 连续规则三角网算法三维建模示意
3.4 地物参数化建模算法
道路标线为面状矢量数据,包括长标线、短标线及方向指示线[15]。在二维平面中,路面长标线、短标线及方向指示线为几何图形,中心点为图形几何中心,可以根据点云数据获取的标线几何中心坐标信息、方向信息、类别信息,利用放样算法实现批量自动建模[16],并运用投影原理将道路标线投射到路面模型上。
道路路灯、树木等点状地物,可以根据点云数据获取的其地面三维坐标、几何信息、类别信息等,利用放样算法读取模型库实现批量自动建模,并运用投影原理将模型投射到路面模型上。
4 试验及精度分析
本文选取某路段长约1 km车载三维激光点云数据进行实验,验证基于三维激光点云道路参数化三维建模的效果和精度。
首先利用点云信息采集软件,获取道路矢量数据和参数信息;其次利用Revit软件建立道路参数化模型库;然后利用连续规则三角网算法结合参数信息构建路面三维模型、利用放样算法结合参数信息批量放置点状地物模型;最后将重建后的点状地物模型利用投影原理映射到路面,实现道路三维模型的参数化建模,局部效果如图6所示。

图6 试验成果局部效果
在精度分析上,分别从点云和模型成果上选取地面关键位置平面坐标和高程,例如分车带、人行道、车行道特征点,开展误差分析评定。从表1中可以看出:在构建路面模型三角网底边参数取 1.5 m时,特征点处模型成果平面坐标中误差约 13 cm,高程中误差约 10 cm,可以表明基于三维激光点云的道路参数化建模精度很高,满足厘米级工程应用需要。

表1 试验成果精度分析
5 结 论
通过对道路数据结构和参数化建模规则的研究,设计并创建了带参数的模型库、连续规则三角网算法、模型放样算法,结合建模软件,形成了一套点云数据的道路参数化三维建模技术工艺。试验表明,该方法可以基于三维激光点云数据,实现道路的高精度、参数化建模。本文所设计的道路建模方法结合了BIM建模的理念,能实现模型与属性合一的建模效果,可以根据需要,在道路工程规、建、管全生命周期管理中做进一步应用。
