高分辨率遥感小卫星微振动全链路集成建模与验证
2024-01-08段胜文陈善搏韩霜雪赵相禹
段胜文,钟 兴,陈善搏*,张 冰,韩霜雪,张 雷,2,3,赵相禹,2,3
(1.长光卫星技术股份有限公司,长春 130032; 2.中国科学院 长春光学精密机械与物理研究所,长春 130032;3.中国科学院大学,北京 100049)
0 引言
随着空间遥感技术的快速发展,高分辨率、高指向精度、高姿态稳定度的遥感卫星成为空间探测、地理测绘、目标监测的重要载体和实现手段。空间载荷,如高分辨率相机[1]、激光传感器[2]、高精度探测器[3]等,其性能的对其所处工作环境要求极高,对微振动环境尤为敏感[4]。对于高分辨率遥感卫星,振源产生的宽频域、小幅值扰振会引起卫星相机传递函数下降,从而造成图像质量下降[5]。
从系统的角度考虑,卫星图像扭曲是振源对卫星光学、控制、结构等系统综合作用的结果。目前国外多采用集成建模分析方法开展微振动分析,即应用不同学科工具建立微振动数学和物理模型,研究振源作用下各系统独立响应过程,最终得到其微振动传递规律[6]。国外已知的大型空间望远镜都开展了集成设计与验证工作,如ESA 研制的超大口径望远镜(Thirty-Meter Telescope, TMT)、超大望远镜干涉仪(Very Large Telescope Interferometer,VLTI)[7]和下一代太空望远镜NGST[8],以及NASA的Origins Plan 项目[9],均建立了综合集成分析系统并取得成功应用。已公开的资料显示,国外针对航天器的微振动研究主要集中在主动隔振系统对各类振颤抑制作用方面[10-11]。
近二三十年来,我国针对遥感卫星的微振动研究取得了一定进展。文献[12]中考虑飞轮转子轴承非线性因素,推导了多干扰源输入飞轮的解析动力学模型,可应用该模型对光学系统进行微振动行为预测。葛东明等[13]提出一种结构运动与姿态控制闭环的时域建模方法,可以较好地解决姿态“漂移”问题,计算系统时域稳态响应,但尚未阐述飞轮转速特性对系统稳态响应的影响。李林等[14]通过建立飞轮与卫星动力学模型,给出相机光轴晃动的仿真值,但没有进行相机光轴角位移与焦面成像像移的定量评价。文献[15-16]中建立了黏弹性材料传力路径下的动力学分析简化模型,计算飞轮隔振平台的动力学响应,以力的传递率为评价指标,但未明确给出评价指标与系统抑制能力的关系。刘瑞婧等[17]提取相机光学系统视轴敏感的关键模态信息,开展了遥感成像试验,并评估微振动设计的合理性。庞世伟等[18]对微振动集成技术进行深入研究,给出了微振动集成建模与综合评估技术的框架。关新等[19]提出采取相机隔振与控制律一体化设计方案,实现隔振性能和控制性能兼备的系统方案。文献[20-22]建立了飞轮扰振动力学模型,分析飞轮谐波和结构扰振对光学系统的影响,并给出扰振对相机调制传递函数影响的定量结果;该方法从理论上给出了光学系统像移量与飞轮扰振的关系,但没有考虑扰振对控制系统的影响。文献[23]建立多系统仿真模型并给出模型之间数据交换方法;从时域角度分析了微振动对光轴的影响,但没有给出微振动指标的定量评价,结果不够直观。文献[24]分析了飞轮扰振力作用下有限元模型的动力学响应,对引起卫星微振动因素的考虑较单一。李青等[25]构建了载荷-本体隔振界面的航天器微振动集成动力学与控制模型,评价隔振前后航天器的姿态稳定度和姿态精度,得到微振动抑制结果。文献[26]建立飞轮与平台耦合振动力学模型,比较系统输出力并计算平台传递性能,但隔振系统是否会影响飞轮姿态控制转矩的正常输出尚未得到研究和阐明。
与国外研究相比,我国微振动研究多从卫星结构动力学响应、相机成像质量指标评价以及控制闭环的问题分析等分立角度出发,有关研究方法和结果不足以支撑系统级的建模分析;并且在公开文献中少见对整星级集成分析建模的实际工程应用案例,相关分析模型中缺少整星级隔振系统的建模,尚无从振源到光学系统像移的完整传递链路建模研究。为了在卫星设计早期阶段全面、定量分析飞轮扰振引起卫星图像抖动的原因,本文以“吉林一号”星座中的“高分04A”高分辨率商业遥感卫星为应用背景,建立时间延迟积分线阵体制的电荷耦合元件 (time delay and integration - charge coupled device,TDI-CCD)遥感卫星的光学-姿控-结构全链路集成分析模型。在飞轮余弦谐波扰振作用下,该模型可在全频域范围定量评估飞轮各典型转速对卫星振动、控制和光学系统的作用,准确评估隔振系统传递特性;给出相机光轴运动与像移的转换公式,通过建模计算得出像移值。最后通过地面及在轨成像试验对模型计算结果进行校验。
1 卫星振源特性及隔振模型
1.1 飞轮扰振特性分析
遥感卫星在轨成像期间,飞轮作为星上主要姿态控制执行部件会产生宽频域、小幅值的扰振,其对卫星的微振动激励随转子转速变化。飞轮本身由于内部转子动静不平衡会导致一次倍频谐波;同时,由于轴承缺陷等问题亦会出现超、次谐波共振。忽略轴承油脂润滑、轴承刚度的非线性作用,飞轮扰振力/力矩可统一描述为[20]
式中:Xj(t)为坐标系六自由度扰振幅值;X1(t)~X6(t)依次代表x、y、z方向的扰振力/力矩Fx、Fy、Fz、Mx、My、Mz;Ω为飞轮转速;Cij对应各谐波幅值系数;hij为对应谐波因子;φ0j为初始相位。
某型飞轮的典型转速-频率-扰振幅值分布如图1 所示,其中:x、y向为飞轮横向,z向飞轮轴向。由图可见,飞轮扰振在0~50 Hz 频率范围主要体现为一倍频(即扰振频率与飞轮转频相等)特性。图中还包括从原点出发且呈放射状分布的谐波,在50~500 Hz 频率范围,存在飞轮结构模态放大等与转速无关的共振现象;测试飞轮扰振力幅值可达到0.125 N(频率58.19 Hz 处)、0.845 N(频率402.4 Hz处)、1.286 N(频率407.4 Hz 处)、0.453 N(频率483.1 Hz 处),扰振力矩幅值可达到0.018 N·m(频率58.19 Hz 处),0.077 N·m(频率483.1 Hz 处),0.039 N·m(频率384.6 Hz 处)。飞轮转速-频率-扰振幅值分布体现轴系及飞轮装配体的力学特性,可为卫星动力学计算和有限元数值分析、飞轮姿态稳定度计算提供输入条件。
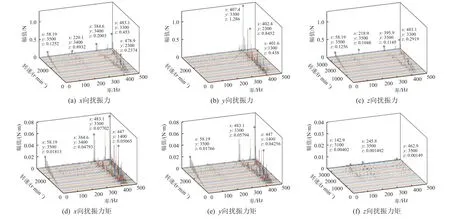
图1 飞轮三方向扰振瀑布图Fig.1 Waterfall plot of flywheel force and moment disturbances in three directions
1.2 卫星隔振系统建模
卫星上常采用黏弹性隔振器来降低微振动响应过大的问题[27-29]。在振源飞轮端和载荷相机端同时安装隔振器形成两级隔振系统(如图2 所示)。建立小尺寸卫星模型时,把飞轮、卫星平台、相机载荷作为各自独立的整体;卫星、相机、飞轮三者质心距离较近(相机、飞轮质心分别与卫星质心的距离同卫星z向高度之比<1/10,两者的质心与卫星质心在x、y向近似重合)。相机隔振器在卫星z向均布安装。因此,在卫星三个方向上,振源及相机隔振器均处在卫星质心附近,三个方向耦合度较小,可近似独立建模。
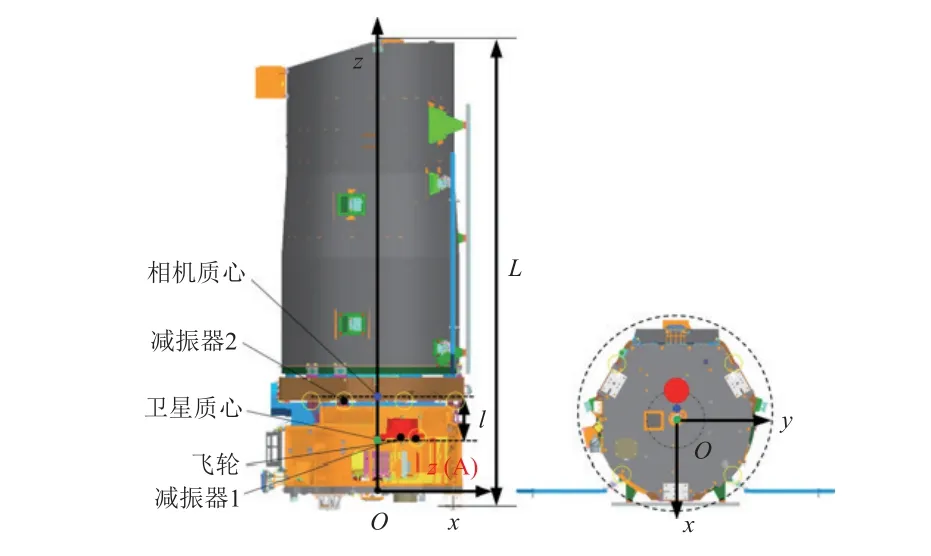
图2 星上两级隔振系统Fig.2 Two-stage vibration isolation system of satellite
对于整星z向,卫星等效为由独立隔振器连接的隔振系统,系统的运动方程为
式中:m1、m2和m3分别为飞轮、卫星平台和相机的质量;x1、x2和x3分别为飞轮、卫星平台和相机在飞轮扰动下的位移;k12和c12分别为飞轮与卫星之间的相对刚度和阻尼系数;k23和c23分别为卫星平台与相机之间的相对刚度和阻尼系数;F1为飞轮转动体输出扰振的叠加,作用在飞轮本体上;F2为经过减振器1 后传递到卫星平台上的扰振力/力矩;F3为经过减振器2 后传递到相机上的扰振力/力矩。系统简化模型如图3 所示。
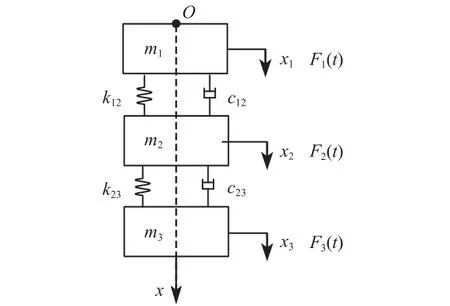
图3 两级隔振系统动力学模型Fig.3 Dynamics model of two-stage vibration isolation system
式 中:β为 质 量 比,β=m2/m1;λ为 质 量 系 数,λ=(1+β)/(2+β) ;δ为对数衰减率,e为频率比,e=ω/n1。
在两级隔振系统中,k12(c12)-m2-k23(c23)代表了两级隔振和卫星平台质量系统m2组成的中间部分。由式(4)可知,由于惯性力与弹性元件k12和k23产生的相互作用,传递率以激振力频率的4 次方衰减,而对单级隔振系统来说,传递率只以激振力频率的2 次方衰减,故而隔振器在激振力频率超过系统固有频率以后,具有更高的隔振效率。
以“吉林一号”星座中的“高分04A”高分辨率商业遥感卫星为例。卫星质量为90 kg,其中m1=1.5 kg,m2=43.5 kg,m3=45 kg。将卫星参数代入式(4),可得到两种隔振系统传递率的对比结果,如图4所示。当m2趋向于0 时,两级隔振系统趋向于单级隔振系统。由1.1 节可知,飞轮扰振主要集中在40~58 Hz、135~249 Hz 和384~483 Hz 频率范围。相机前三阶固有频率分别为103 Hz、108 Hz和120 Hz。为隔离飞轮扰振频率区间,避免固有频率与相机频率的耦合作用,将整星三向基频设计为28 Hz(x向)、29 Hz(y向)和86 Hz(z向)。相机隔振器隔振频率分别为39 Hz(x、y向)和118 Hz(z向),飞轮隔振器隔振频率为25 Hz(x、y向)和80 Hz(z向),避开由两级隔振系统在40~58 Hz 引入的共振放大效应,同时在135~483 Hz 高频段起到更好的隔振效果。卫星对飞轮扰振的抑制能力最终通过集成分析模型验证。
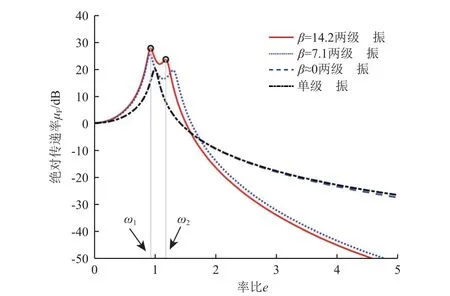
图4 两级隔振系统绝对传递率计算Fig.4 Calculation of absolute transfer-rate of two-stage vibration isolation system
2 卫星结构、姿态学及光学建模
2.1 卫星结构模型
卫星结构由金属结构件、复合材料件经过螺钉装配而成,构成多自由度系统。飞轮安装在结构平台上,其产生的扰振力/力矩通过结构系统传递到相机焦面处,从而引起像移。通过计算从飞轮安装点到相机光路各镜体的位移响应,可在集成模型中将响应位移转换为像移。多自由度弹性阻尼系统的振动微分方程为
式中:M为包含飞轮、结构平台和相机的卫星总体质量矩阵;C为卫星总体阻尼矩阵;K为卫星总体刚度阵;f(t)为形如式(1)中描述的飞轮扰振力/力矩。其中C采用Rayleigh 黏性比例阻尼模型便于解耦。通过拉普拉斯变换,并取s=jω,得到频响函数矩阵
利用模态变换,取位移频响函数的模态展开式
式中:mi、ci和ki分别为第i阶模态质量阵、比例模态阻尼阵和模态刚度阵。
相机镜体质心处的某自由度位移频响为
式中:k=1,2,···,6 为自由度编号;H(d,k)(ω)是从飞轮安装点到镜体在k自由度上的位移频响函数;Fjk(ω)为飞轮在安装点k自由度上的扰振力。于是得到编号j的扰振力/力矩在各自由度上的时域位移响应
2.2 扰动力矩作用下姿态控制系统简化模型
在成像期间,卫星姿态为三轴对日稳定状态。卫星控制器的设计中实际上还包含了耦合力矩项,由于与卫星三轴运动的耦合力矩相抵消,控制系统最终变为各个轴解耦的形式,此时每个方向的控制参数根据该轴的主惯性矩大小确定。
建立在飞轮扰振力矩作用下的卫星姿态控制系统理论简化模型。按照式(1)给出的扰振模型,计算卫星在扰动作用下的姿态角稳态误差值。控制系统框图如图5 所示,其中系统输入为卫星姿态角指令(期望值),输出为卫星实际姿态角。
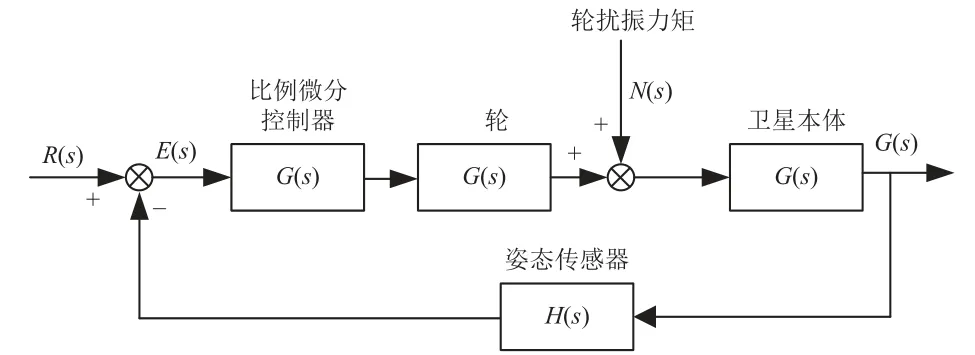
图5 卫星控制系统框图Fig.5 Block diagram of satellite control system
比例微分控制器G1(s)=KP+KDs, 其中:KP为比例系数;KD为微分系数;s为拉普拉斯算子。将飞轮视为二阶系统,其中:ωn为系统固有频率; ξ为控制系统阻尼比。卫星本体G3(s)=1Ibs2,其中Ib为卫星转动惯量。此处只分析飞轮对姿态的影响,忽略光纤陀螺、星敏等姿态测量传感器误差,即认为H(s)=1。将飞轮扰振视为正弦函数n(t)=Knsin(ωt) , 其中:Kn为飞轮扰振力矩幅值; ω为扰振频率;t为时间。其拉普拉斯变换为
令期望值R(s)=0,Cn(s)为输出姿态角,则有误差信号
其中,系统对扰振作用的误差传递函数为
将各个传递函数的表达式代入式(11)中,得到
时域稳态误差为
根据时域稳态误差公式,计算获得卫星在飞轮扰振力矩作用下的稳态姿态角,并进行数值差分,求得对应稳定状态的姿态角速度。
2012年主汛期,江苏连续遭遇了“达维”“海葵”等多个强台风的袭击,刚刚研制成功的应急指挥所迅速“走马上任”,开赴沿海防御台风一线,及时准确地将抢险现场语音、图像、文字、数据等信息传递至省指挥中心;现场决策人员在指挥所内就能方便快捷地查询到所需的各类综合信息,及时采取相应措施调度指挥,减免了灾害损失,取得很大的社会经济效益,也用事实证明了该系统设计可行,通信可靠,数据正确。2013年汛前,在水利部组织的卫星通信应用培训班上,该指挥车在现场进行了应用技术交流和展示,起到了很好的传播和推介作用。
将表1 中卫星质量特性参数和控制器参数代入式(14),选取图1 中x、y、z三向飞轮扰振力矩的较大值及对应频率,将低频0.001 33 N·m(频率16.69 Hz 处)、中频0.018 N·m(频率58.19 Hz 处)、高频0.077 N·m(频率483.10 Hz 处)代入到控制系统,计算得到卫星在轨姿态角稳态误差及姿态角速度稳态误差。由图6 可知,当卫星处于常规推扫模式下,卫星姿态角稳态误差<4.5×10-6rad,姿态角速度稳态误差<7.5×10-6rad/s。
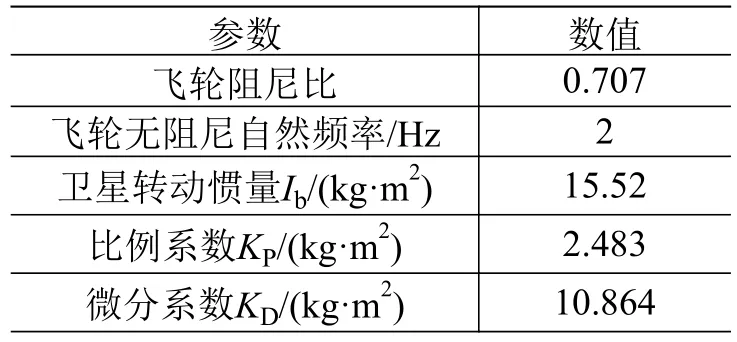
表1 飞轮及卫星参数表Table 1 Table of the flywheel and the satellite parameters
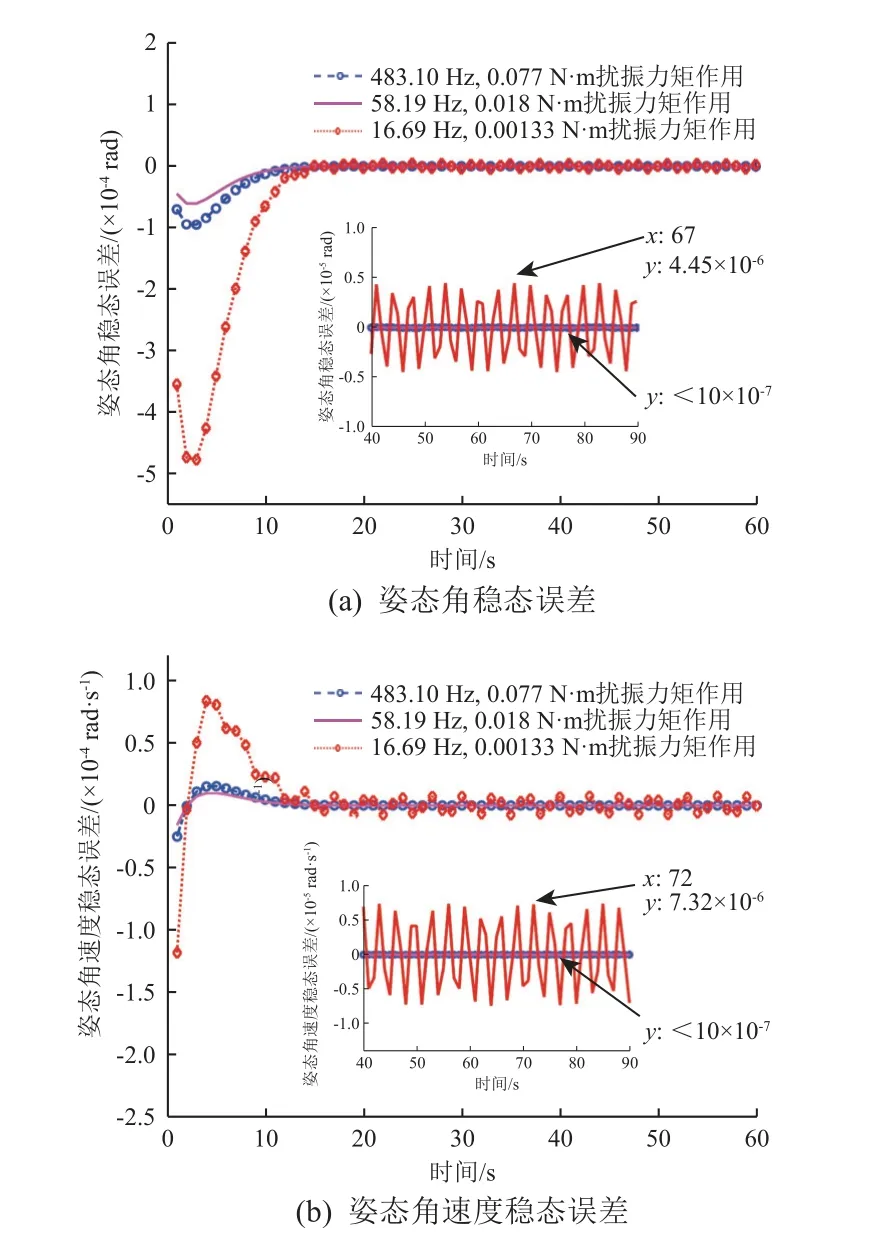
图6 典型扰振力矩作用下在轨卫星姿态稳态误差计算结果Fig.6 Calculation results of attitude steady-state error of onorbit satellite under typical disturbance moment
TDI-CCD 相机的成像过程采用逐级积分形式,获得目标总体灰度值图像为探测器各行灰度值叠加之和[30]。卫星在轨成像时,飞轮微振动造成卫星姿态在其理想位置附近微小摆动,引起相机光轴晃动。假定卫星俯仰角速度、滚动角速度及偏航角速度等3 个方向的姿态稳定度为同一数值 θ′,取焦面法线与视轴重合且平行于整星坐标系z轴(偏航轴)、积分方向与整星坐标系x轴(滚动轴)平行的一片CCD 计算,
式中:dTDI为像元尺寸;f′为光学系统焦距;dpitch和dyaw分别为俯仰和偏航方向扰振力矩产生的像素偏移;dall为由姿态变化产生的总像素偏移。
将相机参数和计算所得卫星姿态稳定度最大值7.5×10-6rad/s 代入式(15),可得像素偏移值<0.03 px。
2.3 光学系统模型
卫星姿控系统产生的微小抖动会导致光学系统各部组件产生微小刚体位移,从而偏离光学设计理想位置,引起光学成像模糊、扭曲,进一步导致像质变差。在进行微振动分析时,将光学系统沿光轴入射的均匀光线展开成以各刚性件自由度为自变量的Taylor 级数形式,即
式中:L(Δu)为相机受到扰振作用时,一组光线经过光学系统中各镜面后达到焦面的光程;j为组件编号; Δu为 光学组件在各自由度上的位移; ∂L/∂uj为光学组件在其各自由度上产生单位位移时光程的变化。
式中: ΔPcx为微振动引起的焦面Ofpxfp像移值;ΔPcy为 微 振 动 引 起 的 焦 面Ofpyfp像 移 值; ΔTj和ΔRj/分别为光/学组件的平动位移和转动位移;∂Lx∂Tj和∂Ly∂Tj为光学组件平动放大系数;∂Lx/∂Rj和 ∂Ly/∂Rj为光学组件转动放大系数。
图7 为反射镜等光学组件受到扰动激励产生位移示意图。使用镜面上3 点组成平面代替镜体,通过求解三角形质心处的位移和平面法向量的夹角在坐标系的投影,来计算镜体的刚性位移。

图7 光学组件空间位移Fig.7 Spatial displacement of optical components
其平动位移和转动位移为
式中, (x,y,z)为镜体上点的空间坐标。
法向量的夹角公式为
微振动对光学系统全链路的影响原理如图8所示。系统为同轴三反光学系统,由主镜、次镜、三镜、折叠镜、调焦镜组成。O′x′为沿轨方向,O′y′为垂轨方向,Oxyz为相机本体坐标系。利用线性叠加方法建立线性光学系统像移与刚体自由度的函数关系,从而可以定量评估飞轮微振动对相机像移的影响。
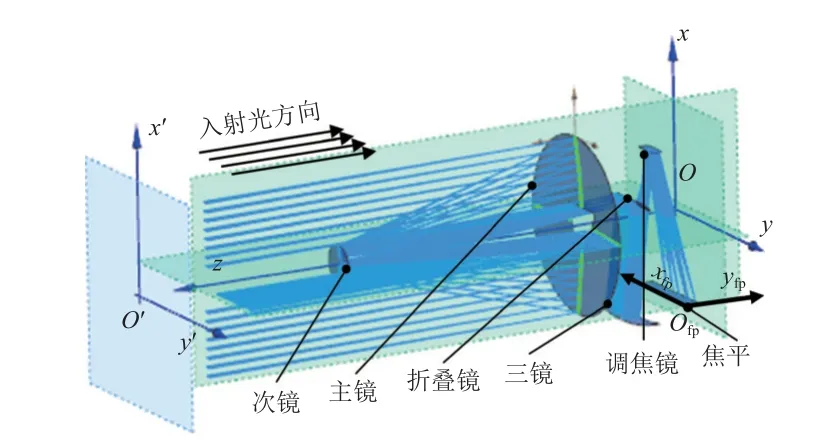
图8 微振动对光学系统影响原理示意Fig.8 Schematic diagram of micro-vibration influence on optical system
3 集成分析模型及计算结果
建立光学-姿控-结构集成分析模型如图9 所示。卫星控制系统根据目标姿态指令控制飞轮转速[32]。飞轮扰振力矩会引起卫星姿态抖动,因而需要保证在成像期间卫星具有足够的姿态稳定度。飞轮扰振通过结构系统传递到光学系统,飞轮的谐波扰振和结构扰振在与结构系统耦合的频率点引起共振,激发光学组件抖动,从而造成焦平面像素偏移。集成分析模型的输入为飞轮的扰振,输出为焦面像素偏移值。
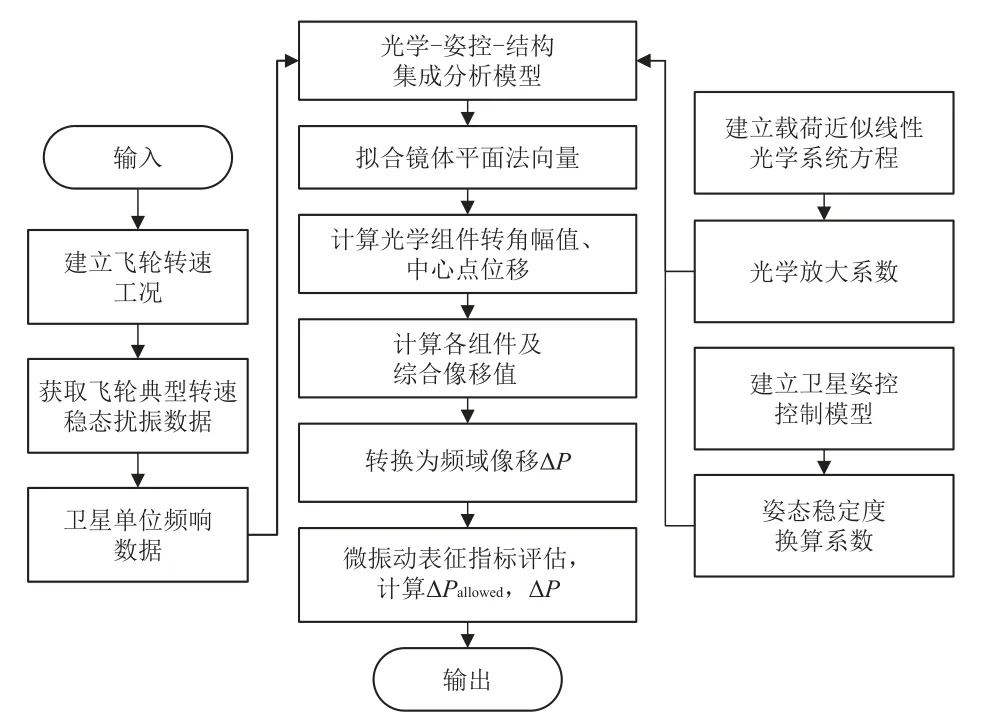
图9 卫星光学-姿控-结构集成分析模型Fig.9 Integrated analysis model of optical-attitude controlstructure for the satellite
模型首先确立飞轮转速工况,计算结构系统在飞轮扰振作用下各光学组件位移响应结果;随后将响应矩阵等参数导入集成分析模型中进行数值计算;最后拟合光学组件的平动位移和转动位移,计算卫星姿态稳定度及姿态变化引起的像移值,得到由飞轮微振动引起的综合像移分布。
计算结果如图10 所示。
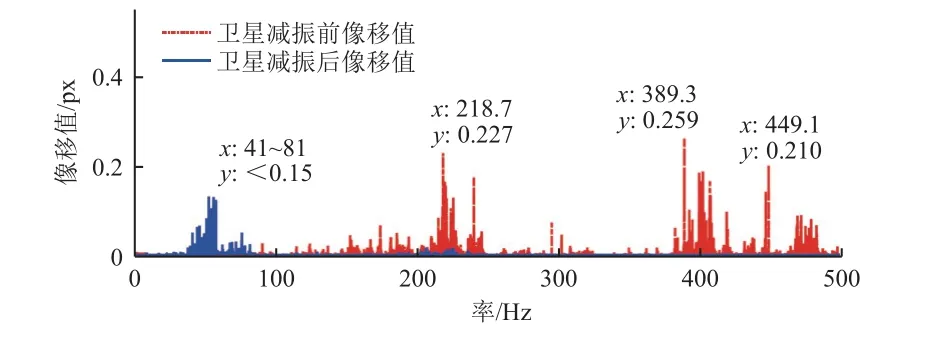
图10 卫星减振前后光学-姿控-结构集成分析模型计算的像移值Fig.10 Calculation results of image offset by optical-attitude control-structure integrated analysis model before and after the satellite vibration reduction
隔振前,卫星在频率218 Hz、240 Hz、389 Hz、449 Hz 处像移值超过0.1 px,最大为0.26 px(频率389.3 Hz 处)。隔振后,飞轮在频率41~81 Hz 频率处引起的像移值比隔振前略有增大,由式(4)可知,这是由于卫星各向一阶固有频率分布在28~86 Hz,飞轮扰振频率与系统固有频率接近引起共振放大所导致;卫星最大像移为0.129 8 px,发生在飞轮转速为3500 r/min、58.21 Hz 处。
4 微振动抑制校验
4.1 地面试验验证
“吉林一号”星座中“高分04A”高分辨率商业遥感卫星在地面研制阶段开展了整星微振动测试,试验由低频悬吊系统、卫星主体、微振动测试仪、飞轮电源及其控制软件组成。光学-姿控-结构集成分析系统与地面试验系统的组合如图11 所示。试验前,在主镜、次镜、折叠镜、三镜、调焦镜处安装高精度加速度传感器,每个组件粘贴3 个传感器以测量刚体运动;为了保证镜体具有较小的法向量拟合误差,同一镜体上的传感器相对均匀地粘贴在镜体边缘位置。测量时,对各飞轮进行100 r/min 间隔转速控制,按照采样频率4096 Hz 采集星体各测点响应数据,转速范围为0~±3500 r/min;待卫星在扰振作用下达到稳态,开启振动测量系统,记录相机镜体的时域响应数据。最后通过软件积分变换得到位移响应,代入式(9)~式(15),可得到综合像移值试验结果。
地面试验像移测量结果如图12~13 所示。隔振前,卫星在频率153、220、402、408、483 Hz 处像移值超过0.1 px,最大为0.49 px(频率402.4 Hz 处);隔振后,整体上看,对于飞轮在频率大于81 Hz 的隔振效率均超过70.0%,全频域像移实测值最大为0.114 8 px(Ofpyfp方向@3500 r/min)和0.066 55 px(Ofpxfp方向@3500 r/min),与图10 的模型计算结果接近,均发生在飞轮转速为3500 r/min、58.21 Hz 处。
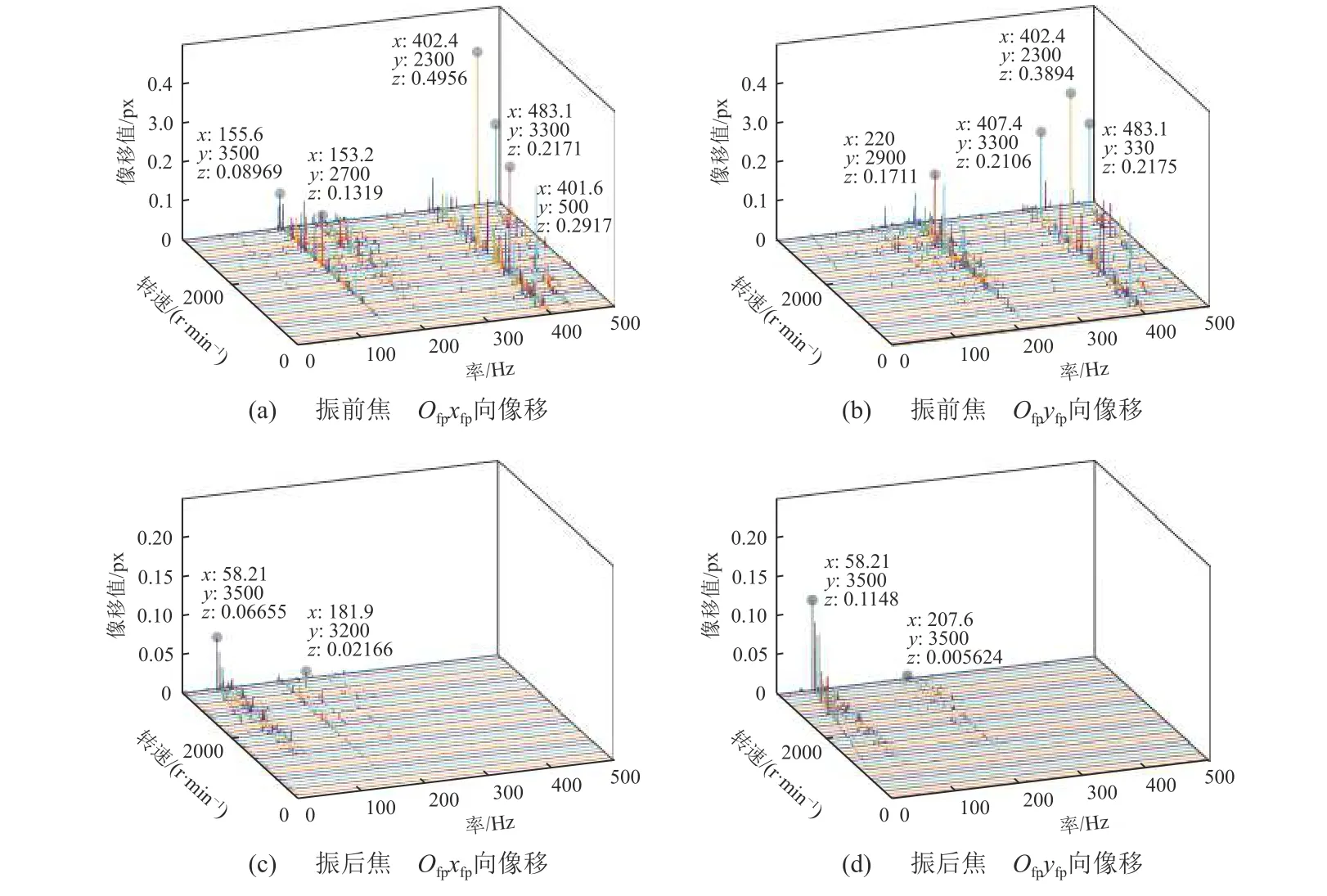
图12 地面试验像移测量结果Fig.12 Measured results of image offset in ground test
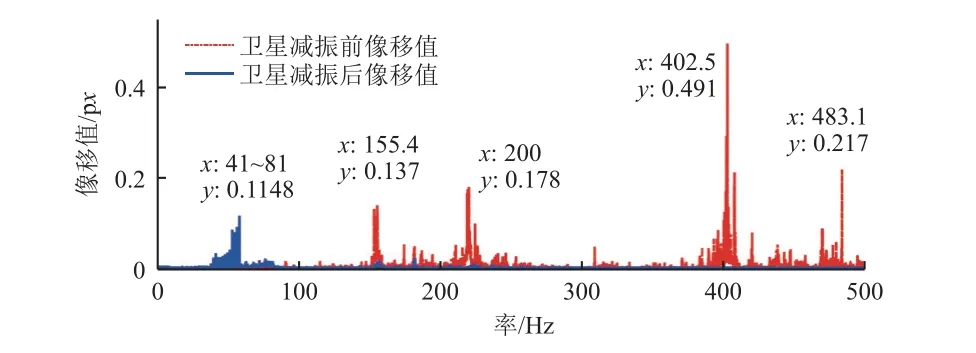
图13 卫星减振前后地面试验测量的像移值Fig.13 Image offset measurements in ground test before and after the satellite vibration reduction
4.2 在轨验证
“吉林一号”星座中的“高分04A”高分辨率商业遥感卫星于北京时间2022 年4 月30 日11 时30 分发射并成功在轨运行,其影像分辨率大于0.5 m,地面幅宽优于15 km。该卫星采用“三正交”卫星姿态控制策略,即x、y、z飞轮轴向与卫星坐标系三轴分别平行。
该卫星进行了在轨成像试验,提取遥感影像中的微振动幅值。卫星推扫模式下,对直线目标(如笔直的道路、桥梁或机场)进行成像,图像处理得到目标高对比度的灰度图;随后采用均值法提取到目标图像质心典型曲线后,进行多项式曲线拟合,再利用傅里叶计算方法对曲线进行频域处理,最终得到卫星成像时刻的振动频率与像移幅值关系曲线。获得卫星微振动测量结果如图14 所示。由卫星辅助数据可知,在成像时刻,3 个飞轮的转速分别为x飞轮-316.30 r/min、y飞轮1 265.18 r/min、z飞轮-2 000.48 r/min。

图14 在轨图像与试验Fig.14 On-orbit images and tests
按照4 Hz 采样率得到成像期间10 s 内卫星三轴姿态稳定度遥测数据,如图15(a)所示,姿态稳定度最大幅值绝对值<7.0×10-6rad/s,与仿真结果在同一水平。
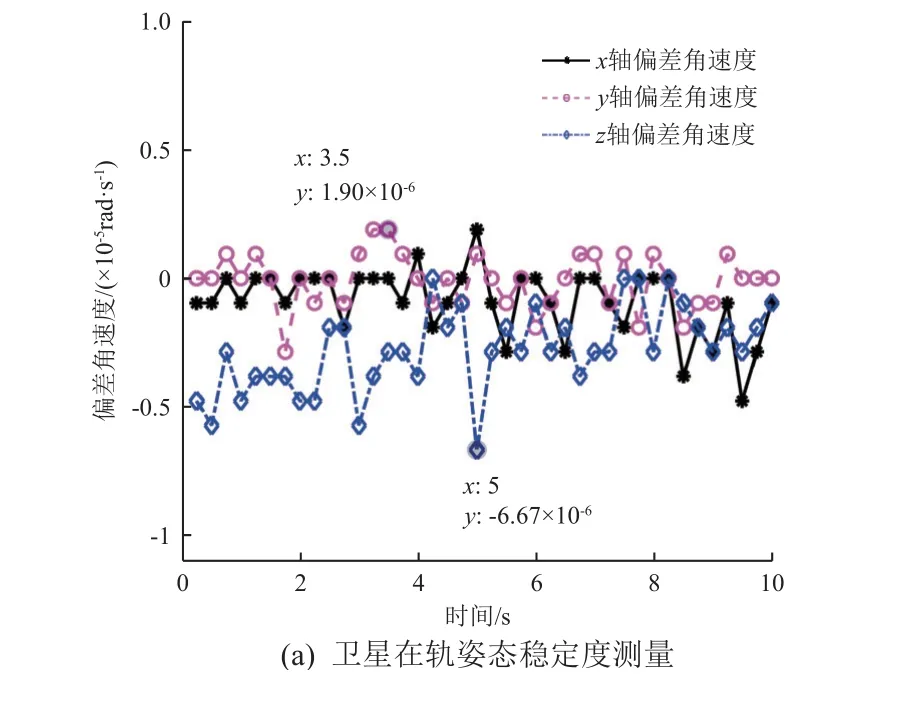
图15 卫星在轨微振动试验结果Fig.15 Result of micro-vibration test of satellite on orbit
卫星光学系统像移允许值的确立,仅考虑正弦振动下成像最模糊时的调制传递函数(MTF),由式(21)[33]求得满足奈奎斯特采样频率下MTF 降低<3%的成像质量条件下微振动振幅容限。对于既定的CCD,动态MTF 仅为正弦像移振动幅值D和曝光时间te的函数。
式中:T为振动周期;te/T为振动频率;f为奈奎斯特频率;J0(2πf D)和J2k(2πf D)分别为第一类贝塞尔函数。
卫星遥感图像下传后,提取图像1200 行数据进行分析。在0~300 Hz 范围内,由3 个飞轮扰振叠加造成的像移最大值为0.084 6 px(频率29.7 Hz,卫星一阶固有频率附近),测量结果与允许值曲线如图15(b)所示。集成分析模型计算像移结果在同一水平,证明了模型的有效性。
5 结论
本文以飞轮为振源,建立了一种光学-姿态-结构集成分析模型,模型以飞轮扰振为输入,输出光学系统综合像移值。该模型可考虑飞轮典型转速特性,定量给出飞轮扰振力矩对卫星姿控系统稳定度的影响,计算定幅、定频扰振下的相机像移;给出相机光轴平动、转动位移与焦面成像像移的定量关系,具有快速、精确的特点。最后开展了全面的微振动地面与在轨试验验证。建模及校验结果表明:全频域像移实测值最大值为0.114 8 px,在轨成像期间姿态稳定度达到7.0×10-6rad/s;集成模型计算像移值为0.129 8 px,卫星在扰振力矩作用下姿态稳定度为7.5×10-6rad/s。卫星在轨测试结果表明,在频率0~300 Hz 像移值为0.084 6 px。集成分析模型计算与试验结果一致。
本文的光学-姿控-结构集成分析模型可用于评估整星隔振状态的微振动抑制能力以及在卫星设计阶段预测微振动成像结果,为定量评价振源对卫星光学、姿控、结构系统综合影响提供了有效方法,具有工程应用价值。
