基于Geomagic Design X的汽车零部件逆向建模研究*
2024-01-07汝春波郑景景
汝春波,郑景景
(江西科技学院 人工智能学院,江西 南昌 330098)
逆向工程也被称为反求工程,主要是对现有的零件和产品进行三维扫描,测量所需的点群数据,将点群数据导入三维软件进行处理,得到三维模型,然后根据设计需求,将新的设计需求纳入复原过程,对模型进行改良和优化[1],最终获得基于原有零部件且满足设计要求的零部件。随着新能源汽车井喷式的发展,新能源汽车更新迭代也不断加速,由此汽车零部件的设计周期也不断缩短,逆向设计这一技术可以大大缩短零部件的设计周期,提高零部件的设计速度。对于逆向设计技术,国内外也加大了相关研究。在国内的众多研究学者中,陈晓斐以蓝光雾化消毒枪为原始模型进行了基于Geomagic Design X的复杂曲面产品逆向设计,通过对逆向设计的过程进行分析,得出通过Geomagic Design X软件可以快速对复杂曲面零件进行再设计[2]。付斌利等人利用Geomagic Design X软件对回力马车进行逆向设计方法研究,发现逆向设计可以提升产品设计的速度[3]。王春香等人利用逆向工程技术对汽车悬架下弯臂进行了快速设计研究,从中得到逆向设计技术可以对汽车复杂曲面零部件进行高质量的快速设计,加快汽车复杂曲面零部件的研发速率[4]。快速逆向设计技术在国外的应用研究也非常多,美国在对其先进战机的零部件设计中也大量采用了快速响应设计技术。由此看来,快速逆向设计在工业产品的设计制造过程中被广泛应用。新能源汽车作为一个复杂的工业产品,其零部件较多,且有很多复杂曲面的零部件,在这些零部件的设计过程中应用逆向设计技术,可以大大提高汽车零部件的设计速率,完善设计过程。
1 逆向设计的流程
在逆向设计过程中,主要的流程是获取零部件的点云数据采集,对数据进行处理,最后建立模型。具体流程阐述如下。
1)点云数据的获取。点云数据采集是通过采集设备将待测零件的几何形状转换为空间点云数据。这一过程主要是通过三维测量技术来实现,而数据的精度与采集设备的精度以及操作过程有直接关系。在逆向设计研究中,对于采集数据精度的研究也是重要的研究部分。
2)数据处理。数据处理阶段是通过特定软件对采集数据进行相应处理,在零件表面数据的采集过程中,由于采集设备、采集环境以及产品自身的影响,所获的零部件点云数据会出现一些杂点和噪声数据。如果不对这些问题数据进行处理,则会导致后期建模精度出现较大的误差。因此要在设计过程中对获得的点云数据进行去杂点、去噪声、数据简化、修补破洞等操作。同时也要对点云数据进行封装重构,以便获得精确的三维曲面,然后在此模型上进行零件的优化设计。
3)逆向建模。目前,根据模型精度要求的不同分为两种模型重构方式,针对表面精度要求较低的一些产品零件,一般采用三角面片的方式直接进行模型重构;而针对产品或零件表面较复杂且精度要求比较高的零件和产品,则采用曲面拟合的方式来对模型进行重构,这一过程是以点云数据为依据,通过对点、线、面这些模型元素,来对零部件或产品的原始三维模型进行还原[2]。
2 汽车转向节的三维数据采集及处理
2.1 汽车转向节的三维数据采集
对某型号汽车转向节零件进行清洁并均匀喷涂显像剂,然后粘贴标志点,以待后续进行扫描测量。转向节零件处理如图1所示。

图1 转向节零件处理
1)三维扫描仪的标定。本次数据采集选用Shining3D-Scanner双目型三维扫描仪。在进行扫描时,环境中的光线变化会对扫描结果产生一定的影响,因此要避免环境中出现强光或逆光。其次对三维扫描仪进行标定,严格按照标定流程完成扫描仪的标定,可以确保扫描的精度。如图2所示。
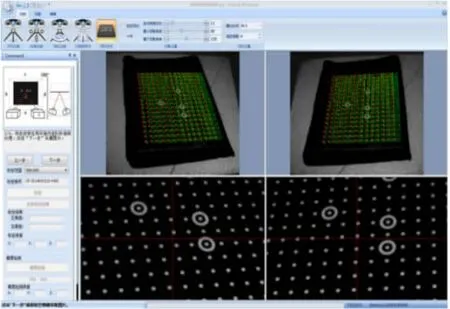
图2 三维扫描仪的标定
2)采集转向节的三维点云数据。先对待采集的某型汽车转向节零件进行表面清洗,然后喷涂显像剂,粘贴标准点,完成三维扫描仪标定和扫描环境处理之后,对某型汽车转向节进行三维扫描。在开始扫描时,应使第1幅扫描画面尽量包括更多的标志点,这样在后面的扫描拼接时每次扫描画面有更多的公共标志点,有利于确保拼接的准确度。在每次扫描一个平面时都会有进度条,这是为了防止出现遮挡扫描画面,或是影响三维扫描仪周围光环境的情况。同时在每一帧画面扫描结束之后应仔细检查扫描所得的点云数据,对于扫描过程中出现的一些杂点和多余的数据进行删除。由于该型汽车转向节不规则,在进行扫描时,会受到一些测量死角的限制,因此在扫描时要根据具体情况,缓慢移动扫描仪或待测的转向节,以便能达到较好的扫描拼接效果。在完成整个零部件扫描拼接之后,要仔细观察拼接扫描所得的模型,对比待测转向节零件,查看是否存在缺失,如较为完整,则可以将全部点云数据导出为.asc后缀文件,以待下一步处理。转向节扫描拼接过程如图3所示。

图3 转向节扫描拼接过程
2.2 转向节点云数据处理
1)导入扫描的点云数据。将后缀为.asc文件点云数据导入到Geomagic Wrap软件,因在Geomagic Wrap软件中打开的点云数据是黑色,不利于处理观察,这时要对点云数据进行着色处理,以便接下来的点云数据的观察处理,如图4所示。
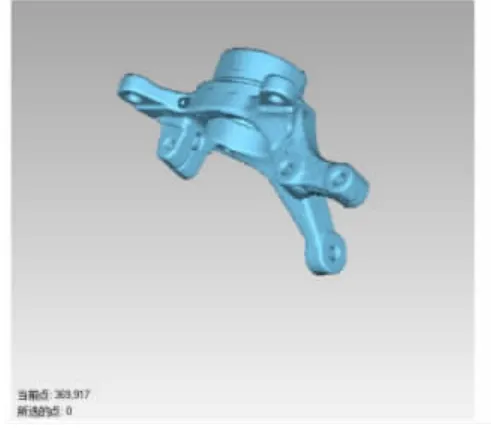
图4 着色后的点云数据
2)去除体外孤点。由于转向节本身不规则,环境中很难做到光线恒定,在扫描过程中曝光度就会产生差别,同时受扫描时的识别误差影响,会使得零件三维图产生一些杂点或是孤点。被选中的体外孤点如图5所示。在处理时就要利用Geomagic Wrap软件中的套索功能对这些不需要的点云数据进行删除。
3)减少噪声。在进行某型汽车转向节的扫描时,由于三维扫描仪的采集过程会有一定的误差,导致扫描得出的转向节点云数据会有噪声点,这些噪声点如若不进行处理,会对最终的数据产生较大影响,因此可以采用Geomagic Wrap软件中的减少噪声的功能,将点云模型中偏移的噪声点进行处理,以达到降低误差的作用。本次扫描的某型汽车转向节体积较小,因此零件细节较多,在处理时选择减少噪声功能的棱柱性(积极),迭代值设置为2,偏差限制设置为0.1mm,这样设置可以使得细节更清晰,零部件的边缘也会更细致平整。减少噪声前后对比示意如图6所示。
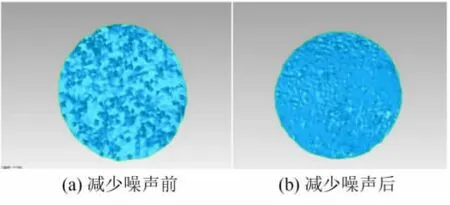
图6 减少噪声前后对比示意图
4)封装数据。在对转向节点云数据模型进行必要处理后,通过Geomagic Wrap软件的封装功能将处理后的转向节点云数据模型(图7)转化成转向节模型。
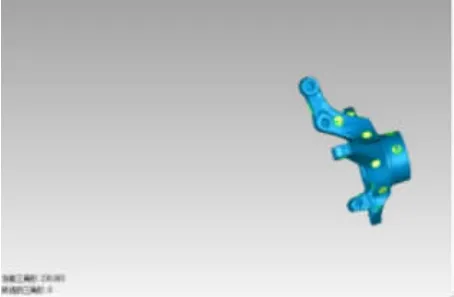
图7 封装后的转向节模型
2.3 转向节多边形数据处理
1)修补细微错误网格。在得到转向节模型后,对于细微的错误网格也要进行处理,选择Geomagic Wrap软件中修补工具栏的网格医生,在选择完成后就会出现如图8所示的对话框,然后进行Geomagic Wrap软件分析并选中错误网格,将全部的错误网格类型进行勾选并应用,Geomagic Wrap软件就会对错误网格进行自动修复。

图8 网格医生对话框
2)去除特征。由于零件自身和扫描过程的限制,在转向节模型平面上,会有一些凸起或是凹陷的现象,可选择处理软件中的去除特征命令进行去除。去除特征前后对比如图9所示。
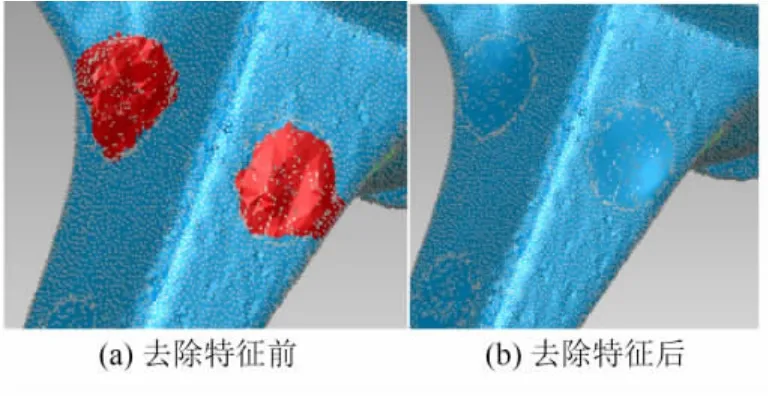
图9 去除特征前后对比图
3)松弛网格。应用软件平滑工具栏内的松弛命令这一选项,选择使用默认参数并应用,就可对模型自动进行松弛网格,应用之后,模型表面会呈现更为光滑效果。图10为松弛后的图形。

图10 松弛后的图形
4)填充孔。由于扫描时粘贴了标志点,在完成扫描之后,原标志点的位置会出现孔洞,同时由于零部件不规则的原因,使得一些光线遮挡的位置也会产生一些孔洞。对于一些相对比较规则且孔洞较小的,可以使用软件中的填充单个孔命令进行填补。图11为填充单个孔的处理过程。

图11 填充单个孔的处理过程
而对于处于边缘位置或孔洞较大的一些孔,则需要使用搭桥命令,不断地将孔洞进行缩小以及边缘孔曲率降低的方法,来进行孔洞填充。填充效果如图12所示。

图12 填充效果图
5)导出文件。在进行以上处理之后,将转向节模型文件从Geomagic Wrap软件中导出,存为.stl后缀文件,以备后续处理。图13为多边形阶段处理完成后的保存图片。
图13 多边形阶段处理完成后的保存图片
3 转向节的逆向建模
3.1 转向节各部位分析
将处理之后的.stl模型文件导入到Geomagic Design X软件中,通过该型转向节的形状特征,将其分为3个部分,如图14所示,然后根据其特征采用不同的处理方式进行处理:①对于外形相对较规则的轴颈上以及支臂上的连接孔,采用直接拉伸与切割的方式进行处理;②对于支臂和轴颈的连接处,其连接断面图形相对规则,连接比较简单,则是采用曲面处理的方式来进行构建;③而对于像支臂这样的形状不规则,而且连接没有具体规律的部分,处理过程要复杂一些,可先进行领域划分,再利用面片拟合的方式来实施构建。

图14 转向节各部位图
3.2 转向节模型重构
通过三维扫描的方式来获得不规则曲面的零部件产品逆向CAD模型,并对CAD模型进行建模,从而获得精确的不规则曲面的零部件产品模型,是目前逆向工程的关键步骤。
3.2.1 连接孔和轴颈的重构
对于连接孔和轴颈的重构,进入软件中草图工具,选择面片草图工具选项,以前基准平面中的一个面为基础,并追加3个断面,以此来进行草图创建,在创建之后,使用软件中的实体工具,选择拉伸,通过把圆环内外进行拉伸,拉伸距离保持不同,这就可以对轴颈进行重建,对于该汽车转向节的连接孔和轴颈的重建,步骤相同。如图15~图17所示。

图15 草图构建过程
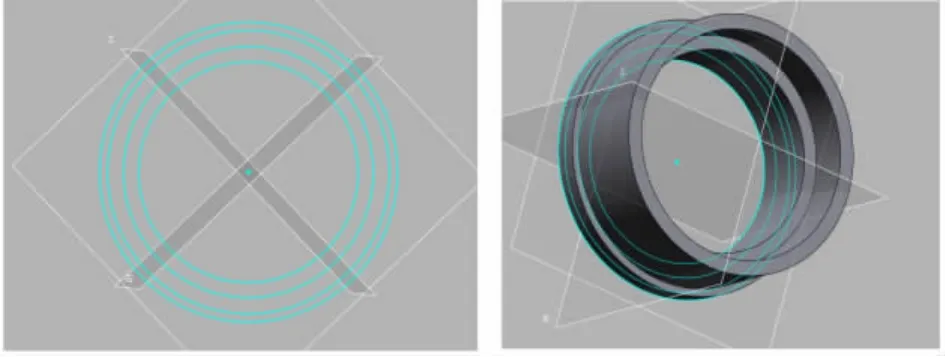
图16 轴颈草图的构建
图17 轴颈重构图
3.2.2 主体部位的重构
该汽车转向节主体部位的重构与轴颈部位的重构方式相似,同样是选择一个前平面为基准面,画出该汽车转向节主体部位面片,找到软件中的创建曲面工具,选择拉伸曲面,这样就可以把该汽车转向节主体部分的草图进行拉伸(图18),然后再在该汽车转向节主体部位上方设置一个平面片(图19),并对该汽车转向节主体部位侧面实施领域的划分,通过软件中的面片拟合功能,对该汽车转向节主体部位侧面曲线进行生成,并对该汽车转向节主体部位与支臂有连接的部分面进行填补。在这些操作完成之后,通过裁剪功能,对保留的部分进行选取,并进行曲面缝合。

图18 拉伸主体面片草图

图19 主体上平面的创建
3.2.3 支臂部分的重构
通过对该型汽车转向节支臂部分进行观察,发现该型汽车转向节支臂部分曲面具有形状不规则、曲面复杂等特性,采用面片草图法构建曲面不适用,所以针对该型汽车转向节支臂部分的处理采用以下流程:首先用画笔功能创建领域,然后通过3D草图来对边界进行划分,紧接着使用面片拟合功能进行拟合,再进行曲面剪切,最后是对需要保留的曲面进行选择并缝合成实体。对于该型汽车转向节其他的支臂部分则采用相同的方法进行构建。支臂构建过程如图20所示。在完成该型汽车转向节3个部分的处理之后,采用布尔运算合并功能,来对其进行连接。构建完成后的转向节模型如图21所示。

图20 支臂构建过程
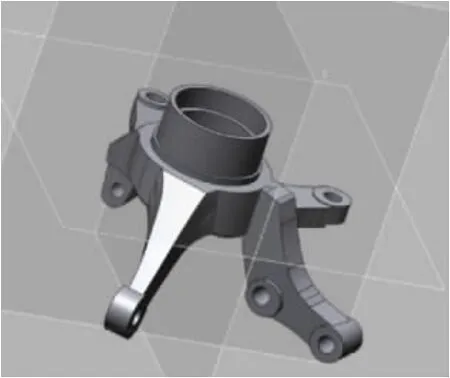
图21 构建完成后的转向节模型
3.2.4 各部位细节的处理
模型建立后,模型与该型汽车转向节实体还存在细微差别,可采用倒圆角的方式,使建立的模型与该型汽车转向节实体更接近,以便减少误差。在进行倒圆角时,采用Accuracy Analyzer 的偏差工具,对圆角的半径进行调节,当调节色谱为绿色时,表示倒圆角的半径调节得较为合理。图22为倒圆角前后对比图。

图22 倒圆角前后对比图
3.2.5 导出模型
在模型建立并完成细节处理之后,就完成了该型汽车转向节实体的逆向模型。导出模型的三视图如图23所示。

图23 导出模型的三视图
4 结论
本文以某型汽车转向节为样本来开展汽车零部件逆向设计研究,得出以下几点结论。
1)逆向设计是以现有产品实体为样本,通过对三维模型的重构,并进行优化设计,从而加快产品的设计速度,在汽车零部件的更新设计上有重要作用。
2)在逆向建模过程中,三维扫描仪作为初始点云数据获取途径,其精度对于后期建立模型的精度有很大影响。
3)在逆向建模过程中,使用Geomagic系列软件进行处理,可以大大提高建模速率。
