电厂锅炉水冷壁检测机器人系统设计
2024-01-05李志鹏边泽楠雷苏雨
李志鹏,边泽楠,雷苏雨
(国能神华九江发电有限责任公司,江西 九江 332504)
随着我国经济逐渐步入稳步发展阶段,城市化水平逐渐提高,社会发展对于电力供应要求逐渐提高。虽然绿色、低碳发展的背景下,风力以及太阳能等发电方式不断兴起,在电力行业所占比重有所提升,但火力以及水力发电仍然是电力生产的主要方式。锅炉作为发电厂的关键设备,在电力供应过程中容易因为高温环境出现磨损,甚至出现爆炸等事故,加强对发电厂锅炉设备的检修是保证电力供应以及发电安全的重要举措。锅炉水冷壁是锅炉的主要受热面之一,检测水冷壁的壁厚以及磨损情况是为锅炉安全运行的重要举措。人工检测方式需要巡视人员利用厚度传感器,在锅炉冷却后进行手动测量,这方式存在明显的安全隐患,因此本文提出一种发电厂锅炉水冷壁检测机器人的设计方案,希望能够为发电厂锅炉的安全平稳运行提供借鉴意义。
1 电厂锅炉水冷壁检测机器人设计要求
以600 MW等级的火力发电厂为例,其进行锅炉水冷壁检测需要经由人口进入,移动机器人作为检测主体进入后在水冷壁的钢管外表进行移动检测,因此需要具备如下几点要求[1]。
1.1 吸附移动要求
检测机器人在检测的过程中需要附着于水冷壁面,因此机器人需要具有一定的荷载能力,能够承受本体重量外,免受高压水冲击的作用力,降低其掉落的可能性[2]。同时由于检测机器人需要对水冷壁进行多点检测,因此需要具备行走机构,机器人具有足够的自由度适应水冷壁粗糙管壁条件,多点位自由移动,自主跨越水冷壁附着物。
1.2 配套设施要求
机器人在水冷壁检测的过程中需要实时向操作人员传递监测信息,因此必须具备机器人主体以及远程平台。除此之外,为了提高对于机器人本体的安全保障,需要吊放保险绳具有较高强度,同时不能给机器人造成过多负荷[3]。在检测机器人工作前,为了提升机器人工作的精度,需要配备高压供水装置对水冷壁面进行清洁。为了确定检测机器人在水冷壁面的位置,需要采用多分散装置对其进行定位,实时监测其运动轨迹[4]。
1.3 操纵控制要求
为了实现对检测主体以及远程平台实时交互的控制需求,需要建立完善的通信系统,提供锅炉外监测能力。方便操作人员远程确定待监测位置并实现对于机器人的精准化操作。操纵控制要求机器人监测系统设计具有可视化,能够实现远程视频以及机器人状态监测功能,操作界面简单明了,操作方式可靠性较高[5]。
2 水冷壁检测机器人主体设计
电厂锅炉水冷壁检测机器人需要满足其预定要求。综合考虑其工作环境,本文设计的水冷壁检测机器人包含磁吸附、直流电机以及远程控制等方式[6]。整体结构设计如图1所示。
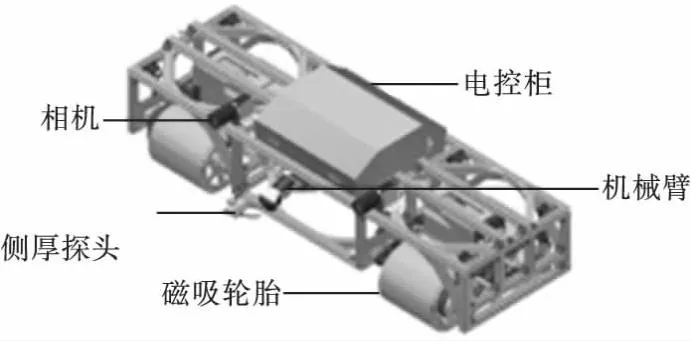
图1 锅炉水冷壁检测机器人结构示意
如图1所示,本次设计的锅炉水冷壁检测机器人整体采用模块化的思想,主要包含五部分:相机、测厚探头、磁吸轮胎、电控柜以及机械臂。机械臂搭载测厚探头,能够实现对水冷壁厚度的测量[7]。同时选用直流无刷电机驱动机器人磁吸轮胎进行工作,机器人主体的运动由平移自由度以及转向自由度舵机完成。同时为了避免机器人在工作过程中因为附着不稳而跌落,在锅炉内部设置检测机器人配套安全支架以及绳索。
3 水冷壁检测机器人控制系统设计
3.1 控制系统总体设计
对检测机器人控制系统进行设计的目的在于对机器人主体行动实现准确控制,确保机器人在进行水冷壁检测过程中能够适应环境特点,完成检测目的[8]。因此综合考虑到检测机器人控制系统的通信等功能,本文设计了一种机器人主控制器为核心的系统,结构如图2所示。
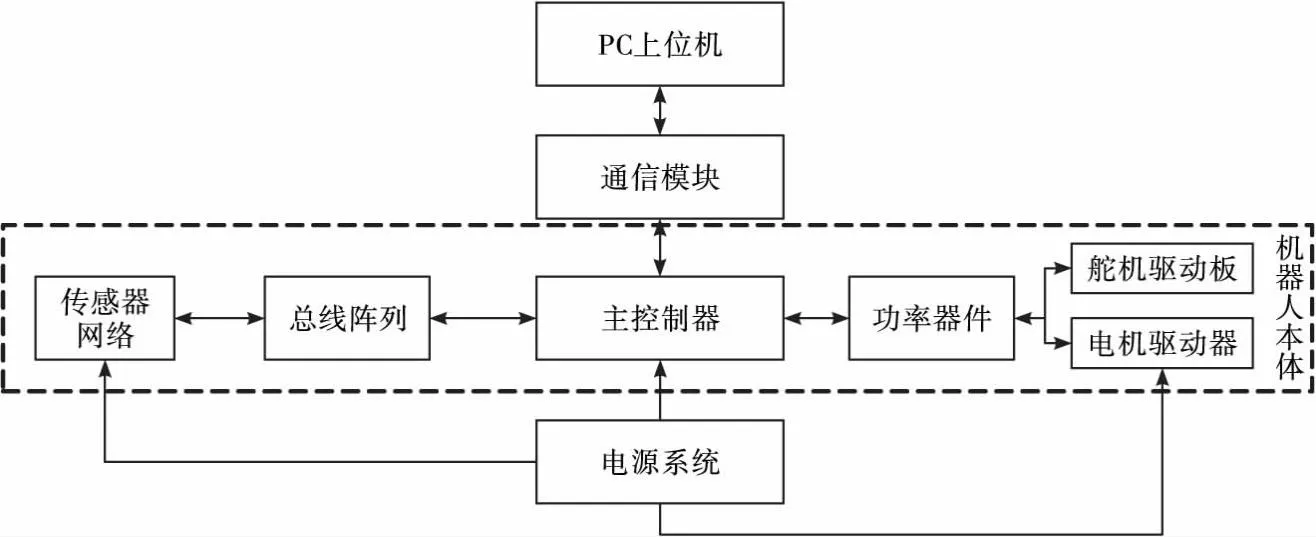
图2 水冷壁检测机器人控制系统结果示意
如图2所示,水冷壁检测机器人控制系统包含PC上位机、传感器网络、总线阵列、主控制器、功率器件以及电源系统。其核心为主控制器,负责对机器人运动发出指令,同时其需要将机器人传回的水冷壁数据借助通信模块传递给PC上位机,便于操作人员进行查看以及分析[9-10]。检测机器人运行至水冷壁边界时会通过传感器网络进行反馈,方便操作人员发出下一步运动指令。舵机驱动板负责驱动机器人机械臂运动,电机驱动器负责对机器人主体进行供电。
3.2 控制系统元件选择
3.2.1 传感器选择
机器人在进行冷水壁检测时需要深入锅炉的内部,这一空间具有复杂性和封闭性,对于基础信号具有屏蔽性。因此为了实现对于机器人的精准定位需要选用更为先进的定位方式。随着无线电以及局域网的迅速发展,无载波通信技术显现出高分辨率以及强穿透力的特性[11]。因此本文选用无载波通信技术定位产品LTP,其定位原理与GPS具有类似性,在使用前需要在锅炉内部进行基站部署,然后将定位装置装于机器人本体,通过球面方程的建立,使用数学方法求解出机器人所在位置。
3.2.2 相机选择
相机是水冷壁检测机器人获取信息的主要工具。因此图像采集所需要设备必须具有高分辨率,能够在锅炉光线较差环境下实现对环境的观测[12]。本文图像检测选择两部德国Basler生产的高速面阵3D相机,这一相机不仅具有较高的图像分辨率,还具有较为优质的性价比。将相机分装于检测机器人的云台以及前端,并通过IP协议实现相机与主机的联通,方便图像信息的实时传输。
3.2.3 主控制器选型
作为机器人的核心部件,主控制器需要具有较为强大的数据处理以及快速输出控制信号能力。因此本文选择STM32493SFT6型号芯片作为水冷壁检测机器人的主控制器,其负责对机器人的电机、舵机以及传感器等装置进行综合控制。作为意法半导体公司推出的产品,这一芯片内核为Cortex M4,能够进行高频率的浮点运算以及DSP处理[13]。芯片附带的FPU至零七七拥有高速处理OTG以及OTP储存器,能够进行快速的模数转换。同时因为其采用64位多重总线矩阵,访问速度更快。
3.2.4 电机与驱动设备选型
机器人需要附着于水冷壁工作,因此其必须克服重力作用,实现在竖直墙面上运动。这要求机器人的电机以及驱动器具有较高的输出功率以及较小的重量。在确保动力充足的情况下选用较轻的驱动电力装置[14]。基于此,本系统选用直流无刷电机负责对机器人进行驱动,这一电机的体积较小,在结构上类似于同步交流电机,通过变频器实现交流信号的传输,从而完成对机器人运动的控制,驱动器选择配套的BLD400型号驱动器,如图3所示。

图3 电机、驱动器选择
3.2.5 人机互动模块选型
人际互动模块选择由美国国家仪器公司所开发的图形化编译平台。这一平台采用图形化的编译思想,一方面操作人员可以在构思时通过程序流程图的设计实现程序的完整编写,具有极高的效率[15]。另一方面,这一图形化编译人际互动平台引入虚拟仪表的概念,方便用户对人机界面进行直接控制。由于其包含有图形处理、数据存储等标准库,且平台支持的端口较多,具有开发便捷的特点。
3.2.6 电源模块选型
电源模块是整体控制系统的动力供应核心,需要保证多模块的平稳运行。本次同采用长距离有线电缆的方式进行电力输送,避免因为电池增加使得机器人的负担过重,将24 V直流电作为控制系统的整体电源供直流无刷电机进行设备土洞。同时选择德州仪器的XTR111AIDGQR型号电流转换器,借助其将220 V交流电转换为直流电。
4 结 语
对电厂锅炉水冷壁健康情况进行检测是保证锅炉正常运行,避免其发生安全隐患的重要举措。正常来看,一次水冷壁的检测需要分散性选择超过7 000多个监测点,每点需要记录当期的壁厚值,工作量大且工作环境复杂,对于检测人员来说是极大的挑战。水冷壁检测机器人的设计能够起到代替人工检测的作用,提升水冷壁检测的效率,对于电厂经营效益的提升具有重要作用。
