长距离运输带式输送机巡检系统研究
2024-01-04马晨博
马晨博
(山西汾西宜兴煤业有限责任公司, 山西 孝义 032300)
0 引言
随着煤炭采掘深度、范围等不断扩展,带式输送机铺设长度、负载等均显著增大[1]。带式输送机是煤矿井下主要的运输设备,同时使用环境恶劣、组成部件多、运输原煤具有可燃性以及铺设长度大等影响,导致设备在使用期间容易出现各类故障、事故,不仅影响原煤正常运输而且存在一定的安全风险[2-5]。如西南地区某煤矿带式输送机故障引燃输送带下方堆积煤矸,引起井下火灾,导致多人伤亡。实现带式输送机运行过程中纵向撕裂、破断、跑偏、打滑等故障监测、排查等,对提高带式输送机运行效率及可靠性有显著促进意义[6]。现阶段煤矿多是安排专人对带式输送机进行定期循环,由于井下带式输送机铺设长度在几公里到几十公里不等,巡检面临工程量大、劳动强度高等问题,同时巡检期间容易出现漏检、误检情况[7]。为此,设计一种带式输送机巡检系统,通过搭载各种巡检设备、功能模块,实现带式输送机使用环境、使用情况以及环境参数等巡检,达到增强带式输送机运行安全保障能力目的。
1 巡检机器人系统结构
1.1 巡检机器人系统整体结构
煤矿井下环境恶劣,存在有潮湿、电磁辐射、粉尘、爆炸性等各种不利因素,因此设计的巡检机器人系统应能满足井下恶劣环境使用需要。具体构建的巡检机器人系统结构如图1 所示,巡检机器人系统包括有巡检机器人、轨道及通信系统等构成,巡检机器人主要用以获取带式输送机运行参数、沿线环境等,轨道则为巡检机器人移动提供通道,通信系统则实现巡检结果传输[8]。巡检机器人通过巷道构建的无线Wi-Fi 通信网络将巡检数据传输给基站,后通过网络交换机、工业以太网等将数据传输给监控后台系统。后台系统对数据进行综合分析,并通过显示屏实时显示巡检结果、井下带式输送机运行画面等[9]。

图1 巡检机器人系统整体结构
1.2 硬件结构
1.2.1 巡检轨道
煤矿井下巷道普遍狭小,巡检若采用沿着巷道底板移动的履带式或者轮式方式则会占用大量空间,同时巷道底板不平整,也会影响巡检装置移动。因此,文中通过轨道为巡检装置提供前后移动通道,将巡检机器人本体置于轨道上。通过铺设轨道可充分利用巷道内有效空间,且巡检不受顶板不平整、运输以及行人等影响,具体巡检轨道在巷道内铺设情况如图2 所示。
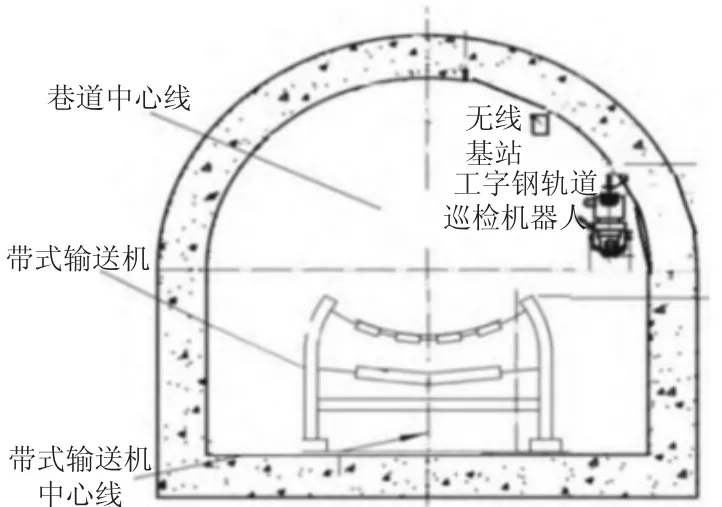
图2 轨道铺设位置示意图
轨道材质为高强度铝合金导轨,强度高且不容易锈蚀,可满足井下高湿度、高粉尘等使用需要。间隔3~5 m 布置一个轨道支架,用以实现轨道悬吊。由于铺设的轨道质量轻、强度高,可根据井下环境需要随意布置,提高巡检机器人巡检范围及适应性。
1.2.2 巡检机器人
巡检机器人包括有支撑系统、本体等,支撑系统主要通过卡轮固定到轨道系统上,实现往返移动;本体包括有电源、摄像头、主控模块、检测传感器以及巡检单元等,具体结构组成如图3 所示。
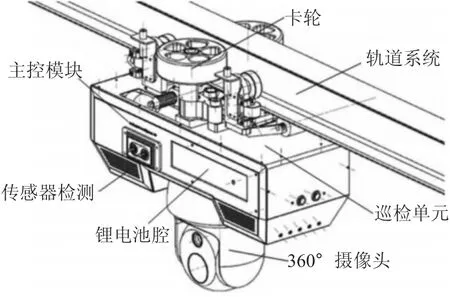
图3 巡检机器人结构
巡检机器人本体搭载有温度、烟雾、温度、气体(CH4、CO、CO2)等传感器,并配备红外成像仪、可见光摄像机等对带式输送机运行画面、表面温度等巡检,摄像机分辨率可达到1 900×1 000。巡检的主要内容包括有:运行参数、托辊状态、烟雾及温度感知、煤流监测以及环境监测等,并通过巡检系统后台将巡检参数进行综合分析。
1.2.3 通信网络
通信网络将现场巡检图像、传感器监测参数以及声音等传输给上位机,是确保巡检工作高效开展的重要环节。巡检机器人本身就具备有信号发射装置,将沿运输巷铺设的千兆光纤收发器、光缆等作为通信主设备,巡检系统与远程监控系统间通过工业以太网传输。无线通信基站主要设备配备情况如表1 所示。

表1 无线基站参数
通信采用的无线基站额定功率为24 W、采用Wi-Fi2.4G 通信,在井下恶劣环境下有效通信长度可达到150~200 m,安全防护等级优于IP54;无线基站间采用光纤通信,可确保基站信号稳定、高质量传输。
2 现场应用效果
将上文所示巡检机器人系统应用到山西某矿3603 运输巷带式输送机巡检中,巷道内铺设的带式输送长度为4 550 m,额定运输量为3 600 t/h,是煤矿井下主要运输设备。具体巡检机器人系统搭载有摄像机、传感器等可实现环境各有害气体含量、带式输送机表面温度等检测,并通过无线通信方式将数据传输给监控上位机,通过上位机内置软件分析、显示巡检结果。具体巡检机器人系统现场巡检画面如图4 所示,巡检机器人系统可实现沿线环境监测、输送带上异物识别以及托管温度测定等。

图4 巡检机器人现场巡检情况
现场应用后,在3603 运输巷内布置的巡检机器人系统运行平稳,可实现24 h 不间断巡检;1 套巡检机器人系统可代替10 人的巡检任务。通过巡检机器人系统应用,大幅降低带式输送机巡检成本,同时可快速识别带式输送机故障、高温位置,有助于增强带式输送机运行安全保障能力及运输效率。
3 结语
采用巡检机器人系统代替传统的人工对煤矿井下长距离带式输送机进行巡检,在降低巡检人员劳动强度、提升巡检效率等方面均表现出显著优势。巡检机器人可实现24 h 不间断巡检,通过红外成像仪、传感器等实现带式输送机表面温度、运行环境参数等检测,对巡检发现的异常区进行预警,避免长距离带式输送机出现运输事故。
