一种智能草方格铺设小车的设计与实现★
2024-01-04汤荣传万仁杰苏景琳苏新萍
汤荣传, 万仁杰, 苏景琳, 苏新萍
(泉州职业技术大学, 福建 泉州 362200)
0 引言
我国是沙漠化[1]最严重的国家之一,沙漠化面积已占国土面积的27.3%,而且以大约2 000 km2/a 的速度扩散,18 个省(市、区)近4 亿人口遭受荒漠化的危害。全国每年因荒漠化危害造成的直接经济损失高达540 亿元,间接经济损失2 889 亿元。沙漠化治理方式可分为生物防治、封育修复和工程防治等。上述治理方式都是以植被生长为前提,但沙漠表层风速较高,沙子流动性高,植被根系难以固定,则需采用防风固沙措施。铺设草方格[2]是最经常使用的治理方法,但现有草方格铺设方案多依赖于人工,智能化程度低且人员的工作环境恶劣。因此,设计了一种可以适应多种沙漠条件下的智能草方格铺设小车[3],该小车能够实现U 型铺设提升整体铺设效率,智能高效的完成草方格铺设作业。
1 总体设计方案
本设计是以Arduino uno 控制板为控制系统,以物联网为传输结构,能够实现自动铺设和辅助监测一体化的全自动草方格铺设小车。铺设小车是由机械系统和控制系统组成,能够实现小车的行进、草料的输送、草料的铺设;控制系统主要功能是构建控制端与小车的实时通信;以智能算法结合机械系统来完成给定的任务。可实现远程控制、环境数据监测、自主运行铺设[4]、反馈铺设质量,草方格铺设小车系统组成框图如图1 所示。
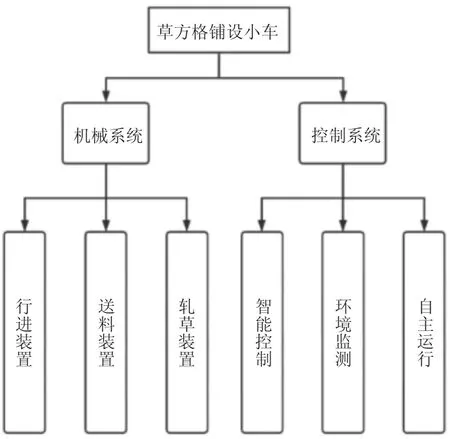
图1 草方格铺设小车系统组成
草方铺设小车采用的是新型U 型草方格一体化铺设的方案,小车前进时,前置送料机构同步将草料送至铺设机构,纵向插刀向下工作,横向送料机构同时进行送料,横向插刀向下插入,完成草方格铺设。U型铺设方式由推杆植草机构和后端铺设机构组成如图2 所示。

图2 U 型铺设方式
2 主要机械机构原理及其实现
草方格铺设小车由5 个机构组成,分别是履带驱动机构、前端下料机构、前端草料传送机构、推杆植草机构以及后端铺设机构。履带驱动机构负责小车的整体行进;U 型草方格一体铺设,主要是通过推杆植草机构和后端铺设机构的相互配合,完成草方格的铺设。
2.1 履带驱动机构
履带能够适应各种地形,包括沙漠中的沙丘;履带的接地面积大,能够分散质量,提高车辆的稳定性,避免在沙漠中行驶时出现侧翻等危险情况;沙漠中的温度往往很高,履带能够承受高温,不易受损,能够保证车辆的正常运行。故选择履带作为铺设小车的驱动机构。在履带结构的前进方向和后退方向设置了抬升角度为60°,既可以做到平稳行进避免陷车,还可提高翻越障碍物的能力[5]。采用双电机独立控制的驱动系统,利用差速原理来实现转弯功能。
2.2 前端下料机构
由于该机构依靠滚筒相互挤压产生的摩擦力来输送草料,滚筒上由突起的小点来增加摩擦力,将会使滚筒出现微型形变,影响两个滚筒的间隙,间隙变大摩擦力减小将会影响草料的输送,即轴的跨距不宜过长,在输送装置的两端以及中间各放置了1 个轴承进行支撑,如图3 所示。
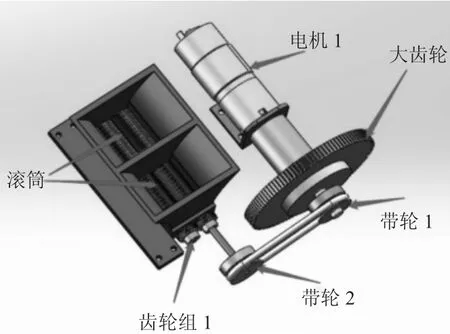
图3 前端送料机构示意图
当装置工作时,电机1 通过联轴器带动大齿轮运转,带轮1 与大齿轮同轴,带轮1 带动带轮2 进行运转,齿轮组带动滚筒进行转动,产生摩擦力来带动草料。
2.3 前端草料传送机构
该机构主要由保护套、皮带传送装置、齿轮装置以及支撑座组成。草料从下料机构落下到达传送带上经由传送带运输至铺设区域。运输装置主要运输的是草料,在载荷方面不用进行太大的考虑。只需保证运输带的速度与履带的前进速度达到一致,也就是保证前进速度与落草速度之间的平衡,电机输出转速后通过齿轮1 与齿轮2 来进行减速达到所设定的速度,如图4 所示。

图4 前端草料传送机构示意图
工作时,电机1 输出转速带动齿轮1,齿轮1 带动齿轮2,齿轮2 所在的轴上由皮带运输装置的驱动轮,用来带动皮带运输,带到下料的目的。
2.4 推杆植草机构
该机构主要由电动推杆、滑台、轮刀放置机构以及轮刀组成。通过推杆的上下移动来控制轮刀插入的深度,可以实现动态调节轮刀的刀身,来获得更高的铺设质量。电动推杆的行程为100 mm,推力为50 N,速度为15 mm/s,可以通过程序控制杆的伸出长度,该推杆能够符合铺设小车的需求,如图5 所示。
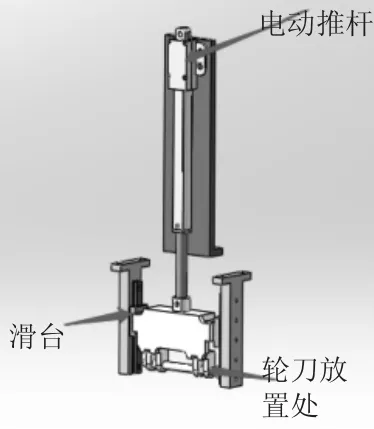
图5 推杆植草机构示意图
工作时,电动推杆向下运动,推动轮刀放置装置向下运动,将轮刀插入地面,跟随着小车的前进将草料传送机构放置下来的草料压入地面。
2.5 后端铺设机构
该机构主要由丝杆滑台、电机、储料箱、舵机组成。通过丝杆滑台来控制整个后端铺设机构的左右移动,来实现纵向铺设草方格,储料箱内设置有滚筒也就是草料的下料装置,通过电机带动滚筒的啮合来进行下料功能,如图6 所示。
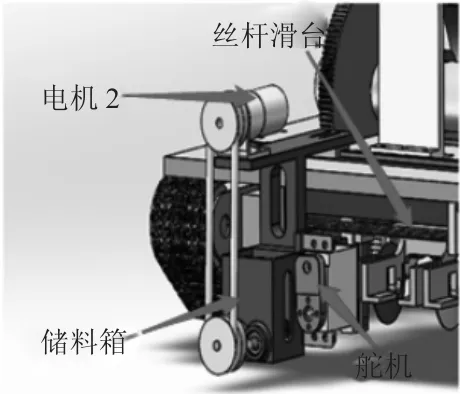
图6 后端铺设机构示意图
工作时,电机2、丝杆滑台和舵机同时运转,来进行开沟和下料,到达纵向极限时电机2 停止运转,丝杆滑台反向运动,通过轮刀将草料压入开好的沟内,完成一次横向铺设。
3 控制系统及其设计
3.1 控制系统的组成模块
控制系统由一个Arduino uno 控制面板为主控制器,以及无线通信模块来实现远程通信。搭载北斗GPS 模块,用来进行实时定位。搭载了L298N 电机驱动模块用来驱动电机,如图7 所示。搭载了ESP-32 CAM进行采集铺设数据,将采集的图片通过无线通信模块上传至局域网将数据储存在云端,方便进行访问。模块电源模块中的电池模块和ADC 数模转换模块,检测电池剩余电量,计算剩余续航里程。过充放保护模块和稳压模块,控制充放电速度并延缓寿命下降。搭载了超声波传感器,该传感器用来测量车体与障碍物之间的距离,反馈数据将用来进行路径规划;搭载了风速传感器,该传感器用来测定沙漠中的风速,一旦风速大于设定值,小车将停止工作进行避险。
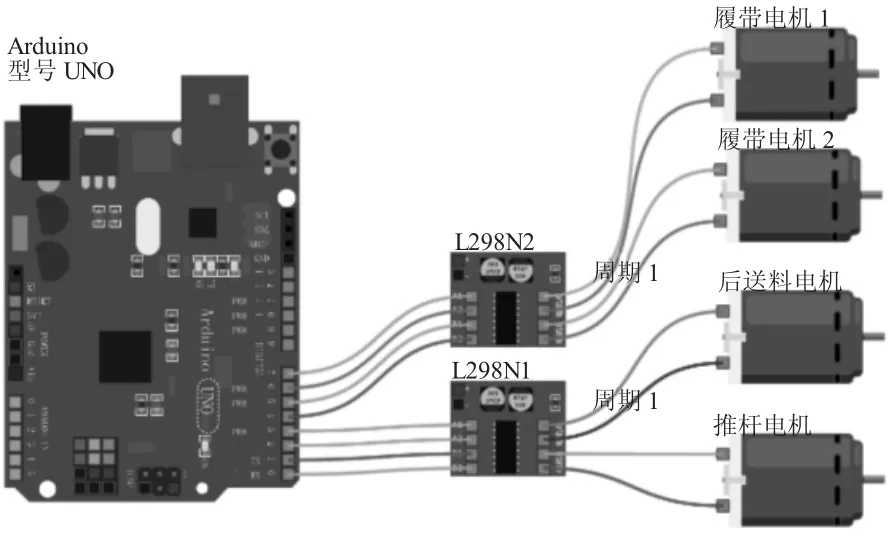
图7 电机控制示意图
3.2 控制系统流程图
草方格铺设小车运动循环,如图8 所示。

图8 为草方格铺设小车运动循环图
4 实物制造
样机采用亚克力板作为主用材。亚克力具有很好的耐磨性、表层硬度、光泽和抗高温能力比较高,价格也比较合理,故使用亚克力作为机器人的主框架。亚克力板由激光切割技术加工,然后拼接成型;在此基础上进行控制系统的安装调试、电机的安装以及各种执行机构的安装;其他部分零件采用3D 打印技术进行制作。
5 结语
土地沙漠化的治理仍是一个严峻的问题,主要治理方式仍采用铺设草方格以达到防风固沙的作用,再进行植被修复实现土地沙漠化的治理。现有铺设方式分为机械铺设和人工铺设,机械铺设存在效率低下、自动化程度低的特点,人工铺设又存在工作环境恶劣等特点。本文所设计的智能草方格铺设小车,在弥补了现有铺设设备缺点的同时,还增加了远程控制、实时监测、自动避险等功能。本机功能满足沙漠治理的实际需求,应用前景广阔,能够有效助理土地荒漠化的治理。