提升机恒力矩减速转换装置控制系统设计及实验研究
2024-01-04袁旭东
袁旭东
(晋能控股煤业集团北辛窑煤业有限公司, 山西 宁武 036000)
0 引言
提升机为实现煤矿井下到地面的关键运输设备,鉴于该设备的特殊性要求其在紧急情况能够稳定、及时制动,以保证设备的稳定运行。为解决提升机传统二级(恒力矩)制动所引发的对其造成冲击和振动剧烈的问题,将二级制动方式改进为恒减速制动方式为主要途径[1-3]。但是,在实际改造过程中存在周期长、成本高等问题;本文将重点针对问题在提升机原制动系统的基础上增加一套设备以实现其具备恒减速制动的功能,即设计一套恒力矩恒减速制动系统,并对改造效果通过实验进行评估[4]。
1 提升机恒力矩减速液压制动系统的设计
目前,提升机制动系统主要以恒力矩制动系统为主,为解决其在制动过程中冲击、振动剧烈的问题,提出采用恒减速制动方式[5]。但是,从恒力矩到恒减速制动方式的改造其周期和成本均较高。本章主要以恒力矩减速制动系统的原理对其液压系统进行优化设计。
1.1 提升机制动系统
制动系统为保证提升机安全、可靠运行的关键部件,其主要结构组成如图1 所示,提升机制动系统关键组成包括有制动器、液压站和电控系统。目前,提升机的制动器主要采用盘式制动器;液压站的主要功能是通过对液压油压力的控制,实现对其制动力矩的调整;电控系统的主要作用是根据提升机的实时工况对其制动指令进行调整。根据提升机工况的不同可将制动方式分为工作制动和安全制动两大类。

图1 提升机制动系统关键组成
1.2 恒力矩减速制动系统
在当前恒力矩制动系统的基础上进行改造,实现恒力矩减速制动系统功能的发挥。为保证最终提升机的制动效果,恒力矩减速转换装置液压系统设计需遵循如下原则:液压系统结构应相对简单,避免改造周期过长、成本过高的问题;所增加的恒减速制动功能不能够影响原恒力矩的制动性能;要求液压系统可对恒减速制动分系统的制动力矩进行可调,固需要为恒减速制动系统配置专用的蓄能器和相关液压阀对其压力进行实时、准确调节;当恒减速制动分系统的功能失效后,可自动切换至恒力矩制动系统,以提升制动系统的可靠性和提升机运行的安全性;要求恒减速制动系统具备独立的电控系统,在其实现恒减速制动功能的基础上具备监控、报警的功能。
结合提升机的制动工况要求和上述设计原则,所设计的恒力矩减速转换装置的液压系统如图2 所示。
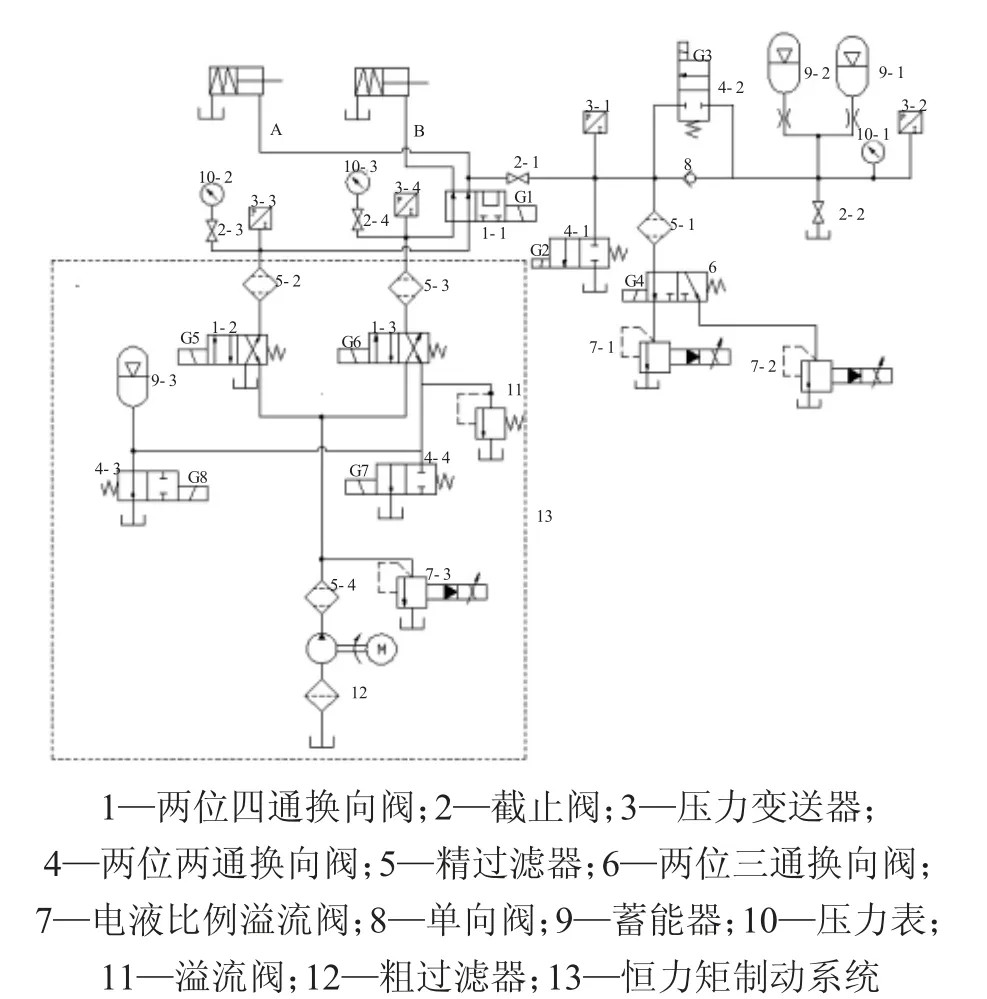
图2 恒力矩减速转换装置液压系统原理
参照提升机原恒力矩制动系统液压分系统的主要技术参数,为恒减速转换装置所配套的图2 中关键液压元件的具体型号汇总如表1 所示。

表1 恒力矩转换装置液压元件选型结果
2 恒力矩减速转换装置控制策略的选择
恒力矩减速转换装置属于相对复杂的机电液一体化系统。在实际提升过程中,尤其是在上升或下降阶段对应提升机所承受的载荷均处于动态变化状态,即其存在较大的不确定性。因此,为保证其恒减速制动功能的实现,尤其需要充分掌握提升机的实时运行工况,并对其液压系统进行准确调节以对其盘式制动器的炉具进行高精度控制。
具体控制思路如下:通过对提升机现场运行参数监测并反馈至上位机分析后得出相应的控制指令,对相关阀组的开口大小、方向等进行控制以获得预期的控制效果。
因此,针对提升机恒力矩减速制动的控制要求,分别对采用模糊神经网络的PID 控制策略和模糊PID控制策略在不同工况下的制动控制效果进行对比。
2.1 恒力矩减速转换装置模型构建
根据图2 的恒力矩减速转换装置液压系统的原理图,基于AMESim 软件构建仿真模型如图3 所示。
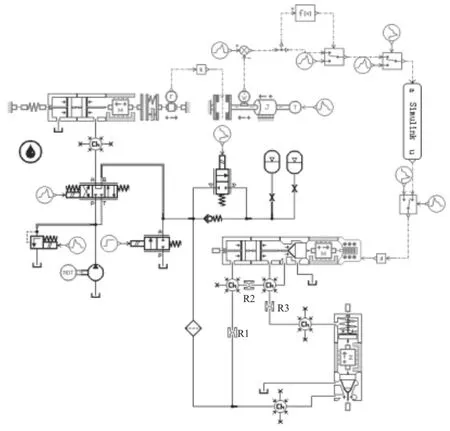
图3 恒力矩减速转换装置液压系统AMESim 仿真模型
2.2 控制效果对比
基于图3 所构建的AMESim 仿真模型,以提升机在空载下放重物的工况为例,分别对模糊神经网络PID 控制策略和模糊PID 控制策略的控制效果进行对比,对比仿真结果如图4 所示。
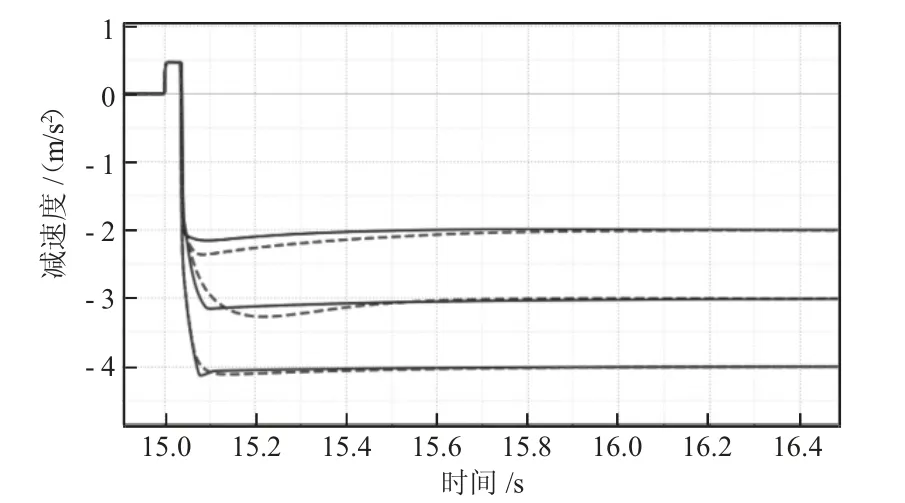
图4 提升机空载下放重物工况下控制效果对比
如图4 所示,虚线为模糊PID 策略的控制效果,实线为模糊神经网络PID 策略控制效果。经分析可知:当提升机的减速度为-2 m/s2和-3 m/s2时,采用模糊PID 策略较模糊神经网络PID 策略具有明显的超调量和延时性。因此,为保证恒力矩减速转换装置可稳定发挥其制动功能,应该采用模糊神经网络PID控制策略。
3 恒力矩减速转换装置的应用
评估所设计的恒力矩减速转换装置应用效果的关键在于其制动性能是否能够满足《煤炭安全规程》和JB/T 3277—2017 的标准要求。通过构建实验平台对恒力矩减速转换装置在实际制动过程中的滞后时间、响应时间以及最大超调量进行验证,验证结果如表2 所示。

表2 恒力矩减速转换装置制动效果
如表2 所示,恒力矩减速转换装置响应时间为0.154 s,满足盘式制动器空动时间小于0.3 s 的要求;滞后时间为0.022 s,满足液压油压力随电压的滞后时间小于0.2 s 的要求;在制动过程中蓄能器提供的压力最大超调量为0.114 MPa,满足振幅小于0.2 MPa的要求。
4 结论
提升机作为煤矿生产的关键辅助运输设备,其主要承担物料、人员以及设备的运输任务。制动系统为保证提升机安全、稳定运行的基础。传统恒力矩制动系统在制动过程中存在振动和冲击距离的问题,而单纯的改造为恒减速制动系统存在周期长、成本高的问题。为此,本文结合提升机制动要求完成了恒力矩减速转换装置的设计,并对其应用效果进行验证。
1)采用模糊神经网络PID 策略对恒力矩减速转换装置进行控制;
2)采用在恒力矩制动系统的基础上增加一套液压系统实现恒减速制动的功能。
3)通过实验表明:恒力矩减速转换系统在响应时间、稳定性以及滞后特性等方面均满足《煤炭安全规程》和JB/T 3277—2017 的要求。