工业机器人写字工作站仿真应用研究★
2024-01-04王小刚
王小刚
(山西水利职业技术学院机电工程系, 山西 太原 030000)
0 引言
国际机器人联合会(IFR)最新发布的《中国机器人产业发展报告(2022)》显示,工业机器人产量达36.6 万台,比2015 年增长了10 倍。数据显示工业机器人的应用越来越广泛和普及,急需一大批的专业人才对工业机器人进行应用编程。为了较为直观地展现工业机器人的灵活性,各个展示场合经常性地选用工业机器人写字工作站。以往的示教编程在写字场景往往需要示教较多的示教点,人为地示教受编程人员的经验和操作熟练程度影响,往往是示教精读不足的根源。在本文中,将使用离线编程的方式控制工业机器人写字工作站。利用离线编程工具RobotStudio 能够较好地控制成本,取得可视、可信的运行数据和结果,并尽可能地减少停机,避免现场编程过程中可能出现的碰撞、干涉、不合理等情况。
为了完善工业机器人写字工作站的应用,实现写字的动态视觉效果,本文基于ABB RobotStudio 离线编程工具,对ABB IBR120 型工业机器人写字工作站进行了仿真应用的研究。通过三维建模、Smart 组件设计、I/O 信号创建与连接、工作站逻辑设定、路径规划、程序设计和仿真运行等手段实现了按指定文字样式、书写节拍等要求进行写字的预期任务。借助虚拟仿真运行软件可以直观地考察运行效果,适时地修改配置参数,极大地提高设计过程和编程效率,一定程度上满足了展示场景要求较短的编程时间、书写不同文字的要求,具有较强的应用意义。
1 写字工作站
写字工作站是工业机器人按照文字轮廓进行走轨迹的运动。本文拟在书写平台上写下“学党史、强技能”。为了满足该任务要求,从展会搬运灵活性要求、经济性等角度出发,本工作站可选用以下设备:
1)ABB IRB120 桌面小型工业机器人,负载能力为3 kg,可达范围为0.58 m;
2)可实现常用马克笔夹取的平口夹爪工具;
3)待书写平台;
4)其他设备,如机器人控制柜、安全围栏等,虚拟仿真中可省略。
2 工作站仿真设计
根据生产现场的任务要求,按照真实环境,利用RobotStudio 工业机器人离线编程软件对系统进行了工作站布局规划、待书写文字建模、书写操作、Smart 组件设计、I/O型号创建与连接、工作站逻辑设定等操作。
2.1 工作站布局规划
根据书写要求,工作站需要用一台机器人在待书写平台上进行书写。这里工业机器人写字工作站主要由ABB IRB120 型工业机器人、书写平台、夹有马克笔的平口夹爪工具等组成,具体布局如图1 所示。
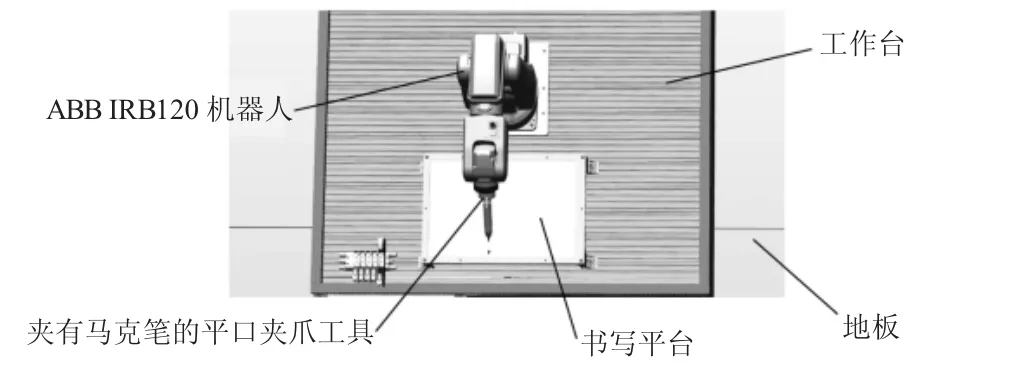
图1 工业机器人写字工作站布局规划
2.2 待书写文字建模
为了让机器人能按照给定的文字进行书写,首先要创建该文字的三维建模。一般方法是先使用RobotStudio 的测量工具,测量出具体的书写平台待书写文字区域的大小,再在三维建模软件中进行模型的创建。这里我们选用SolidWorks 进行文字“学党史、强技能”模型的创建。其一般方法是先按照之前测量的书写平台尺寸创建对应大小的凸台,再使用“文本”工具在凸台上写字。为了后续操作方便,可以将书写好的文字进行小尺寸的拉伸并着上颜色,以默认文件格式保存即可,如图2 所示。

图2 工业机器人写字工作站三维文字示例
2.3 书写操作
在工作任务开始之前,使用RobotStudio 的放置功能将待书写文字建模放到书写平台上,使用自动路径命令逐字的捕获建模文字的边缘,捕获完成后将路径同步到RAPID 中即可,待仿真运行无误后,机器人就可以按照建好的模型进行移动了。工业机器人写字工作站书写操作如图3 所示。
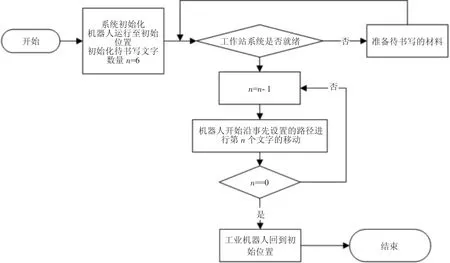
图3 工业机器人写字工作站书写操作流程
2.4 Smart 组件设计
在完成上述的操作后,工业机器人已经能够沿着设置的路径进行移动了,但是在虚拟仿真的环境中是无法留下书写的痕迹,故需要在工业机器人离线编程软件RobotStudio 中实现书写笔迹的效果,使用Smart组件是较为灵活的一种方式。Smart 组件与事件管理器相似,都可以实现动画效果的功能,但是Smart 组件比事件管理器功能更为强大,能够更加高度逼真地模拟现场设备的I/O 接口与控制逻辑等功能[1-2]。
工业机器人书写的动态字迹效果可以由动作组件“TraceTCP”,开启/关闭机器人的TCP 跟踪来完成。工业机器人写字工作站组件与属性连接关系如图4 所示。

图4 工业机器人写字工作站组件与属性连接关系
2.5 I/O 信号创建与连接
工业机器人写字工作站在书写时,机器人夹持的写字笔工具在书写时需要外部提供给相应的动作信号,书写笔在发生动作后可以反馈给机器人相应的动作结果。在后续进行离线编程时,机器人的动作信号可以和这里创建的Smart I/O 信号相连接,让机器人具有控制Smart 组件的能力。这里创建一个数字量输入信号di_write,用于控制写字笔书写轨迹的开启和结束动作,置1 为启用书写笔书写轨迹效果,清0 为关闭书写笔的书写轨迹效果。
2.6 工作站逻辑设定
工作站逻辑设定是用来关联Smart 组件与机器人端的信号通信的,通过设置可完成整个工作站的仿真动画。工作站的逻辑设定一般是先将Smart 组件的输入或输出信号与工业机器人端的输出或输入信号进行关联,Smart 组件的输出信号作为工业机器人端的输入信号,工业机器人端的输出信号作为Smart 组件的输入信号,这样就可以将Smart 组件当作是一个可以与工业机器人进行I/O 通信的可编程控制器了,便于后续的程序控制[3]。这里先为机器人添加一个数字量输出信号do_write,用作控制书写笔轨迹是否启用,让其与Smart 组件的数字量输入信号di_write 进行关联。工业机器人写字工作站逻辑设定如图5 所示。

图5 工业机器人写字工作站逻辑设定
3 工作站程序设计
为了使工业机器人写字工作站达到书写留痕的效果,需要对其进行RAPID 程序设计,添加笔迹控制的I/O 信号。为了提高编程效率,简化工作量,可以先在虚拟仿真环境RobotStudio 中进行程序的编写。工业机器人写字工作站书写效果如图6 所示。

图6 工业机器人写字工作站书写效果
完成工业机器人写字路径规划后,需要进行RAPID 程序设计开启书写笔迹或关闭书写笔迹,其主要程序包括工作站初始化程序、工作站书写程序和主程序。其主要程序代码如下所示:
4 仿真测试及运行
规划好运行轨迹,编写好程序后,一般要验证当前工业机器人运行轨迹是否会与周边设备发生干涉,使用运动监控功能可以达到这一目的;此外,机器人仿真运行后,还要对轨迹进行分析,确定机器人运行轨迹是否满足要求,可通过TCP 跟踪功能将工业机器人的实际运行轨迹记录下来,进行进一步分析[4]。待分析调优并经离线验证无误后,可以通过以太网接口将程序和相关数据下载到工业机器人控制器中,再结合现场实际情况稍加调试即可运用在实际的展会等场景中了。
5 结语
本文利用ABB RobotStudio 离线编程软件结合书写展示实际的场景,搭建了工业机器人写字工作站,并完成了工业机器人工作站布局规划、待书写文字建模、书写操作、Smart 组件设计、I/O 信号创建与连接、工作站逻辑设定、程序设计和仿真测试及运行。该工作站可以根据书写展示要求重新设置要书写的文字、调整书写速度以满足场景需要。该方法大大缩短了手动逐点示教的长周期和低精度的缺点,很大程度提高书写程序设计的效率和书写文字的美观程度。
