AMESim在水下钻机机械手回转控制中的仿真设计
2024-01-04张娜刘广治
张娜,刘广治
(1.廊坊职业技术学院计算机科学与工程系,河北廊坊 065001; 2.北京探矿工程研究所,北京 100083)
1 概述
1.1 AMESim软件
AMESim软件是计算机系统工程高级建模和仿真平台,它是由法国Imagine公司1995年开始推出的基于计算机技术的系统建模及仿真软件,作为系统仿真的标准平台受到了世界各国用户的一致认可。AMESim软件主要用于解决控制、气动、电磁、机械以及液压等复杂的系统问题,已经被广泛用于设计和分析车辆、航空航天、工程机械和船舶、铁路等行业的数字试验平台、机器人、传动系统、泵、马达、矢量推进器等[1-3]。
AMESim为用户提供了一个时域仿真建模环境,它可利用已有模型和(或)建立新子模型,来构建优化设计所需的实际原型,采用易于识别的标准ISO图标和简单直观的多端口框图,方便用户建立复杂系统以及用户所需的特定应用实例,还可以修改模型和仿真参数进行稳态和动态仿真、绘制曲线并分析仿真结果。该软件界面友好、操作方便,能够让使用者快速建立仿真模型,并能帮助用户分析系统参数以及优化设计,从而缩短开发周期,减少开发成本。
用户可以直接使用AMESim软件提供的元件库,包括信号控制库、机械库、液压库、液压元件设计库、动力传动库、液阻库、气动库、电磁库、电机及驱动库、冷却系统库、热库、热液压库、热气动库、热液压元件设计库、二项库、空气调节系统库等来构建仿真模型,从而可以从繁琐的数学建模中解放出来,专注于系统本身的设计。该软件中的应用库也正在针对不同的研究对象进行不断地补充和完善。此外,作为设计过程中一个重要的应用工具,AMESim具有与其他软件丰富的接口,例如Simulink、Adams、LabVIEW、Simpack、Flux2D、RTLab、dSPACE、iSIGHT等。
1.2 水下钻机机械手
水下钻机是一种钻探系统完全工作于水底的钻探设备,与通常的船载钻机需要钻探船或钻井平台有着完全不同的工作方式,水下钻机在水下工作时,只需要一条具有承载能力的脐带缆就可以实现远程的能量供应和通讯控制,图1为水下钻机工作示意图。与船载钻机相比,水下钻机具有钻探成本低、效率高、受天气影响小、样品扰动小、取心质量高、设备体积小、易操作和船舶适应性强等特点。因此,研发水下钻机用于海底资源勘探、海洋地质调查以及海洋科学考察,已成为必然趋势。

图1 海底钻机工作示意图[4]Fig.1 Schematic diagram of subsea drilling machine
由于水下钻机通过远程遥控的方式进行作业,因此水下钻机钻杆的接卸需要利用机械手来完成,水下钻机钻杆接卸机械手及钻杆存储机构如图2所示。钻杆与岩心管均沿着径向布置在存储机构中,机械手的回转中心为钻杆和岩心管存储机构的圆心,机械手在回转马达的驱动下,沿着给定的角度去抓取钻杆用于水下钻机钻进,同时机械手也将含有取出样品的岩心管送到岩心管存储机构中。该过程对机械手回转角度控制都很严格,机械手接卸钻杆的精度直接关系到水下钻机作业能否顺利完成。
由于水下环境的特殊性,机械手等关键部件的研发成本很高,借助计算机仿真的手段,建立仿真模型,确定关键参数,为定型设计提供依据,降低研发成本。
2 水下钻机机械手控制系统物理模型搭建
水下钻机机械手控制系统最关键的就是控制好机械手的回转角度,并对相应角度的钻杆进行抓取。水下钻机机械手回转动作的控制模式是比例阀控摆动马达的回转运动,控制策略为角度反馈的闭环控制[5-8]。
利用AMESim仿真软件建立机械手控制系统仿真模型分为以下四个步骤:①方案模式(sketch mode),可以创建新系统以及修改或完成一个已有的系统;②子模型模式(submodel mode),可以给每一个元件选择子模型、使用首选子模型功能(premier submodel)以及删除元件的子模型;③参数模式(parameter mode),可以检查或修改子模型参数、拷贝子模型参数、设置全局参数、选择方案的一部分区域,显示这一区域的共同参数,以及设置批运行;④仿真模式(simulation mode),可以初始化标准运行仿真和批量运行仿真、绘制结果图、存储和装载所有或部分坐标图的配置、初始化当前系统的线性化、完成线性化系统的各种分析,以及完成活性指数分析。
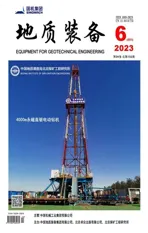
利用AMESim软件库中元器件的模型,搭建水下钻机机械手回转控制的物理模型如图3所示。各个模型主要参数:马达排量100 mL/r,运动部件转动惯量100 kg·m2,运算放大器参数10,泵排量28 mL/r,电机转速1000 r/min,工作压力21 MPa。
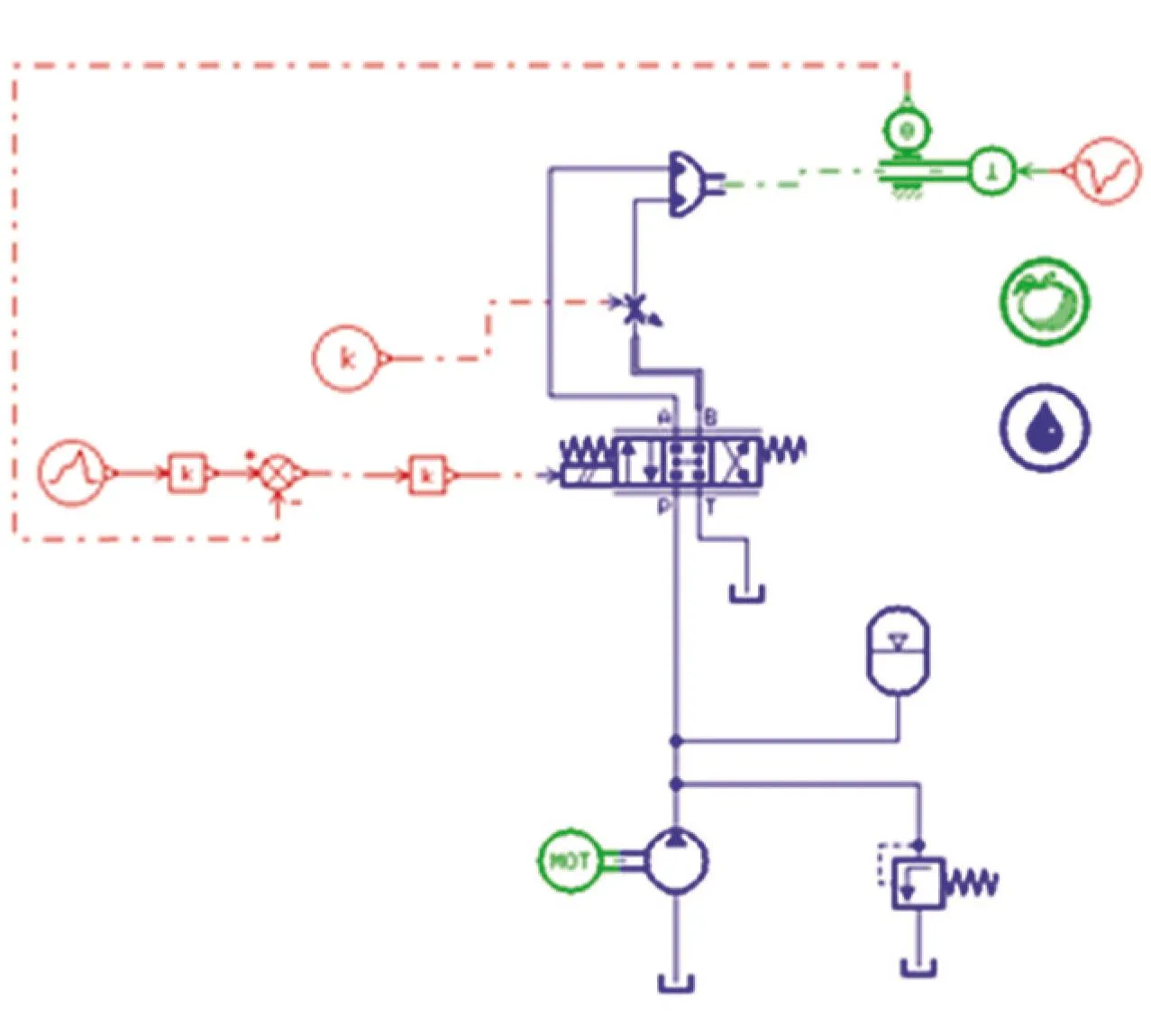
图3 机械手回转控制系统仿真模型Fig.3 Simulation model of manipulator rotation control system
3 水下钻机机械手回转控制系统仿真及分析
钻杆在存储机构的分布规律为沿圆周每隔15°布置,因此机械手的回转机构的回转角度为15°的整数倍,所以选取15°作为输入信号,如图4所示。

图4 输入信号曲线Fig.4 Input signal curve
输入的控制信号为阶跃信号,控制信号与角度传感器的反馈信号进行做差,差值经过信号放大器放大后控制比例方向阀动作,摆动马达按照输入信号回转,直至角度传感器测得信号与输入信号相同为止。输入信号为15°时,机械手回转角度响应曲线如图5所示。

图5 机械手回转角度响应曲线Fig.5 Response curve of manipulator rotation angle
从图5可以看出,在输入的控制信号作用下,比例方向阀控制机械手回转,机械手回转角度开始时系统存在超调;在闭环控制下,慢慢稳定在输入信号所限定的位置附近进行微小角度的摆动,这种现象可能由于机械手回转部分的惯量大引起。
改变机械手回转部分的转动惯量,可以得到机械手回转角度响应曲线规律,如图6所示。由图6可以看出,机械手回转部分的转动惯量确实可以影响超调量,但系统都存在振动。分析原因可能是系统的阻尼小,因此在机械手的回转控制系统中通过改变阻尼元件,来分析是否由于系统阻尼小导致角度响应曲线存在超调以及振动。
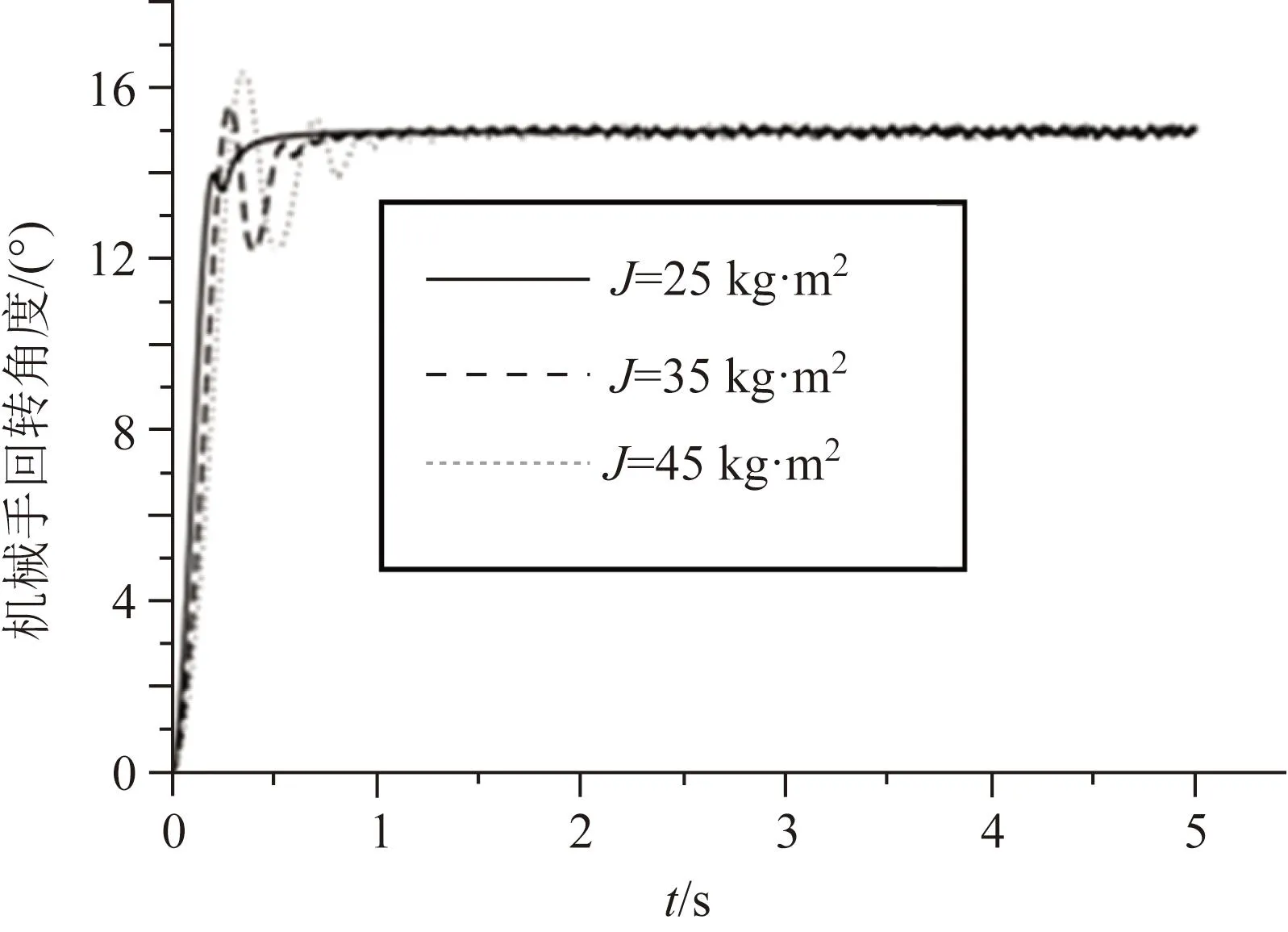
图6 机械手回转角度响应曲线Fig.6 Response curve of manipulator rotation angle
在机械手回转系统中增加节流阀,改变节流阀的开口度,得到的机械手回转角度响应曲线如图7所示。从图7中可以看出,降低机械手回转控制系统的节流面积可以有效地解决系统的超调和振动,可以有效提高机械手回转的稳定性。

图7 机械手回转角度响应曲线Fig.7 Response curve of manipulator rotation angle
改变控制信号的形式,由阶跃控制信号改变为线性输入信号,分析对机械手回转角度曲线的影响规律。输入的线性控制信号如图8所示,输入的线性控制信号控制机械手回转由初始位置15°回转到45°。
图8 输入的线性控制信号Fig.8 Input linear control signal
在图8输入的线性控制信号作用下,机械手回转角度及角速度变化曲线如图9所示。在线性控制信号控制下,机械手回转角度响应曲线表现为线性变化,与输入信号一致。比较图9与图5可以看出:线性信号控制下的机械手回转角度更加平稳,没有超调及振荡。由图9还可以看出机械手回转的角速度比较平稳。
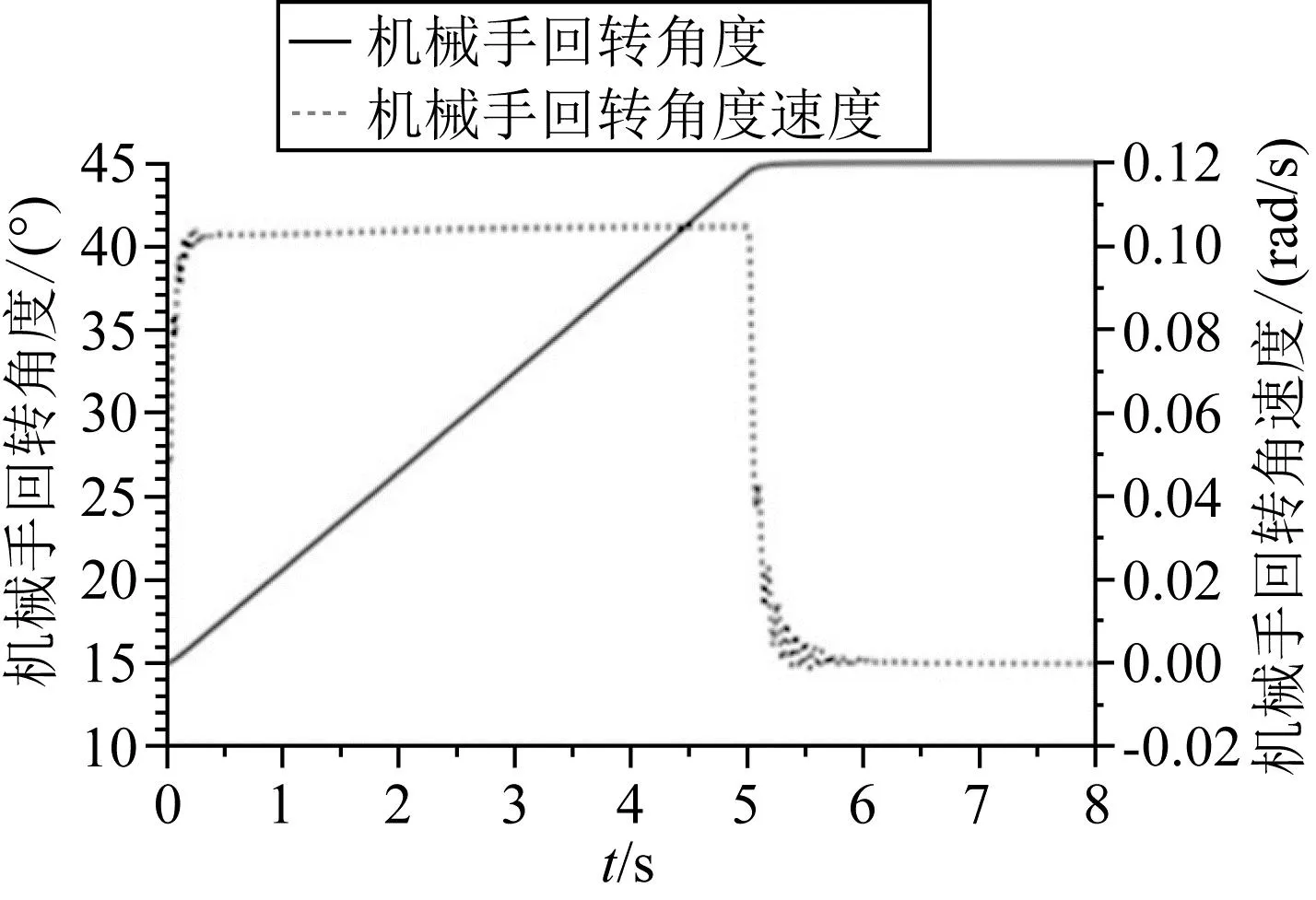
图9 机械手回转角度及角速度曲线Fig.9 Manipulator rotation angle and angular velocity curve
4 结论
机械手回转过程中,回转部分转动惯量大小会影响机械手回转的控制精度。因此机械手在设计过程中,在保证强度的前提下,应尽量减轻回转部分的重量及偏心量,从而降低回转部分的转动惯量。机械手回转控制系统中增加节流阀可以有效增加系统阻尼,改善回转过程中的稳定性。
AMESim仿真软件可以快速搭建液压控制系统,通过改变设计参数,得出性能优化曲线,为实际液压控制系统设计提供重要依据。借助该软件可以有效模拟实际控制系统的效果,缩短研发周期,节省系统的设计成本。