无人机航摄在水电工程大比例尺地图测绘应用研究
2024-01-03彭虎
彭 虎
(黔西南州兴源水利电力勘察设计有限公司,贵州 兴义 562400)
1 无人机航摄系统
采用SIFT算子和Harris算子结合进行影像匹配,首先提取SIFT特征点、Harris点,对其进行相对定向,得出内集点A、B,删除重复点,并合并内集点A、B,得出内集点C,删除内集点C中的错误匹配点,得出内集点D,然后构件同名三角形,获取新角点,通过相对定向得到内集点E,合并内集点D、E后,判断点数是否满足要求,如满足要求,即匹配结束。为进行大比例尺测图工作,首先需对该地区进行勘测,并收集相关资料,采用无人机航空摄影对该地区的立体数据进行采集,进行调绘与补测,之后进行两级检查,若不合格,则重新进行调绘与补测,然后进行地形图编辑,并建立数据库,制作制图数据,最后提交验收及质量检查,验收合格后即可提交验收成果,如图1所示。

图1 SIFT和Harris算子特征的影像匹配流程图
本研究所采用无人机相关参数如表1所示,航飞设计参数如表2所示。

表1 无人机相关参数
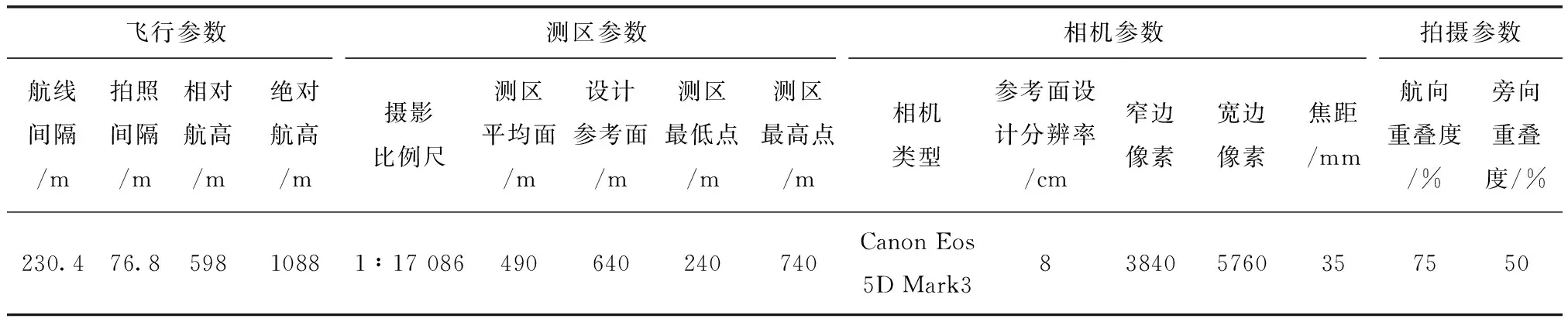
表2 航飞设计参数
根据上述无人机飞行参数,可计算得出各勘测位置的航飞参数如表3所示。根据测区的基本情况,确定本次勘测的无人机飞行距离为80 km,共计拍摄照片700张。

表3 各勘测位置的航飞参数
2 工程概况
本研究以某水电工程为研究背景,该水电工程为Ⅱ等大(2)型工程,开发任务以发电为主,水库正常蓄水位3447.00 m,相应库容0.5528亿m3,电站装机容量为660 MW,多年平均发电量32.064亿kWh,保证出力(P=5%)173.43 MW。电站工程建筑物由挡水建筑物、泄洪消能建筑物、引水发电系统及升压站等组成。该航摄测区的面积为13 km2,主要以山地为主,平均海拔为490 m。该测区的已有GPS基本控制点如表4所示。本测区采用区域网布点法进行像控点布设,航线上每隔10~15条基线布设,在旁向上按2~4条基线布设。

表4 GPS基本控制点 m
3 数据质量和精度分析
以GPS基本控制网的点位数据为基准,对各点位的中误差进行分析,其计算结果如表5所示。根据表格相关数据,可对像控点进行同步环、异步环检验,可得出其同步环最大相对闭合差为3.51 ppm,限差为15 ppm,异步环限差为± 18.71 cm;点位p11为像控点最弱点,其三维约束平差最弱边相对精度为1.33 × 10-5,其三维无约束平差相对精度为5.46 × 10-5。当成图比例尺为1∶2000时,以上计算得出的无人机勘测精度满足规范要求,其准确性较高。

表5 中误差计算结果
为分析无人机勘测得出的数据的质量及精度,需对其空三像控点误差、地形图平面精度、地形图高程精度进行计算分析,其空三像控点误差如表6所示。由表可知,各测点间的误差具有一定的差异性,X、Y、Z方向的最大误差分别为0.066 30 m、0.166 26 m、-0.171 36 m,总体而言X方向的控点误差最小,其次为Y方向的控点误差,Z方向的控点误差最大。根据该表可计算得出三个方向的残差中误差,其中,X方向的像控点残差中误差为0.0366 m,Y方向的像控点残差中误差为0.0603 m,Z方向的像控点残差中误差为0.103 m;X、Y、Z方向的空三加密点中误差分别为0.141 m、0.126 m、0.119 m。根据相关规范可得,当比例尺为1∶2000时,像控点的平面限差应<2.0 m,高程限差应<1.5 m;加密点的平面限差应<1.1 m,高程限差应<0.8 m,采用无人机勘测得出的误差远小于规范所规定的限值[1-5],说明采用无人机航摄系统得出的勘测结果精度较高。
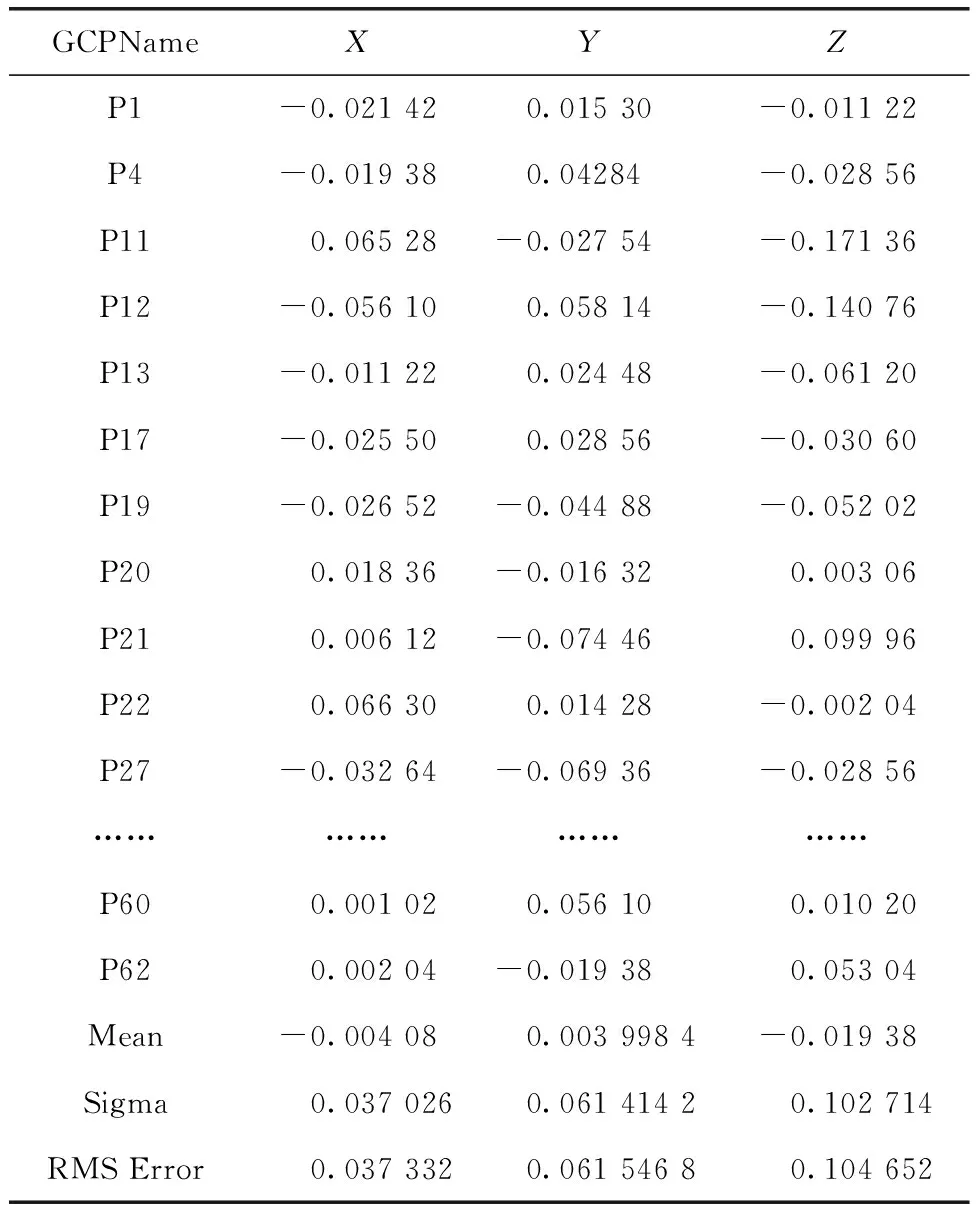
表6 空三像控点误差 m
地形图平面精度如表7所示。由表可知,各测点的地形图平面精度具有一定的差异性,对比图上量测数据与实测数据可得,测点48的点位偏移量最大,其值为0.1947 m,测点4的点位偏移量最小,其值为0.0228 m,图上量测数据与实测数据间的点位移偏量间的差值大部分<0.1 m,与实际数据还存在一定的差异,这是由于,在无人机测绘过程中会受到外在因素的影响,会发生光学畸变现象,导致无人机测绘得出的地形图平面数据存在一定的误差。根据表7数据计算得出地形图平面中误差为0.08 m,根据《工程测量规范》(JTS 131—2012)可得[6],当比例尺为1∶2000时,平面位置的误差精度应<1.6 m,无人机勘测得出的地形图平面中误差远小于其指标限值,说明采用无人机航拍系统勘测的准确性较高。
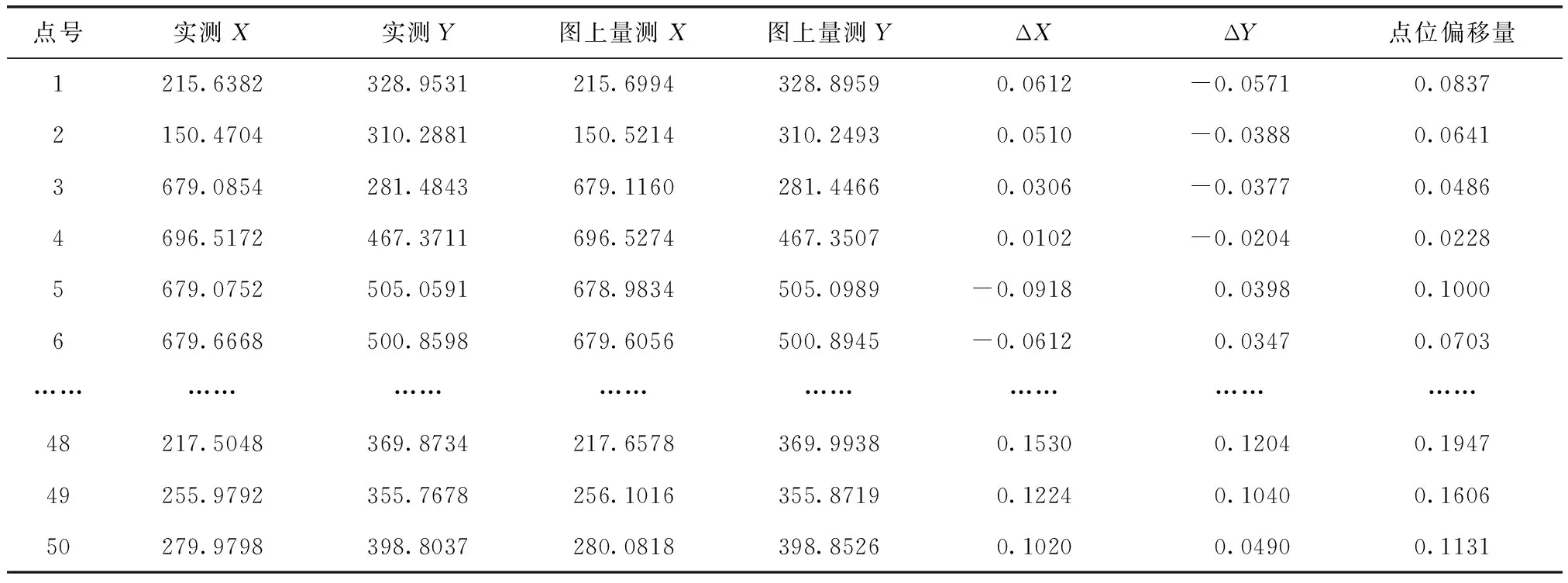
表7 地形图平面精度
地形图高程精度如表8所示。由表可知,测点100的误差最大,其高程误差为4.12 m,测点7、测点8的高程误差较小,误差均为0.23 m。根据表中数据计算可得,采用无人机航拍系统得出的高程平均中误差为± 0.68 m,当比例尺为1∶2000时,规范所规定的高程中误差限值为2 m,无人机勘测得出的地形图平面中误差远小于其指标限值,说明采用无人机航拍系统勘测的准确性较高。综合以上分析可得,采用无人机航拍系统得出的空三像控点误差、地形图平面精度、地形图高程精度均在规范所规定的限值内,说明其勘测成果质量优良。

表8 地形图高程精度 m
4 结 论
(1)X方向的像控点残差中误差为0.0366 m,Y方向的像控点残差中误差为0.0603 m,Z方向的像控点残差中误差为0.103 m;X、Y、Z方向的空三加密点中误差分别为0.141 m、0.126 m、0.119 m。
(2)测点48的点位偏移量最大,其值为0.1947 m,测点4的点位偏移量最小,其值为0.0228 m,图上量测数据与实测数据间的点位移偏量间的差值大部分小于0.1 m,与实际数据还存在一定的差异,这是由于,在无人机测绘过程中会受到外在因素的影响,会发生光学畸变现象,导致无人机测绘得出的地形图平面数据存在一定的误差。
(3)当比例尺为1∶2000时,采用无人机航拍系统得出的高程平均中误差为± 0.68 m,规范所规定的高程中误差限值为2 m,其误差远小于其指标限值,
(4)采用无人机航拍系统得出的空三像控点误差、地形图平面精度、地形图高程精度均在规范所规定的限值内,说明其勘测成果质量优良。
