基于RBF神经网络的柔性机械手反演控制
2024-01-03李正强刘益军赖建防吕伟宏
李正强,刘益军,赖建防,吕伟宏
(1. 佛山三水供电局,广东 佛山 528199; 2. 宁波天弘电力器具有限公司,浙江 宁波 315722)
0 引言
近年来机械手的快速发展和应用,推动着整个工业化发展的高效化和智能化[1]。柔性机械手具有速度快、耗能低、接触面积小等优点,在机器人领域、海洋工程、航空航天领域受到越来越多的重视[2]。
反演控制(backstepping)方法,又称反步法、回推法或者后推法,形成于1990年初,在此后得到迅速发展并在非线性控制设计取得了很大的成功[3]。反演控制的思想是通过输入使系统的特性达到李雅普诺夫意义上的稳定,两者推导上有相似之处,但是思想上还是不一样的。文献[4]在拉格朗日动力学基础上,依据反演控制策略设计滑模控制律,仿真结果表明,所提出的控制方法能够实现机械手系统快速稳定。为了改善和提高多自由度机械手移动精准度和控制效果,文献[5]提出了基于自适应滑模的多自由度机械手反演智能控制方法,该方法结合智能感应可以对机械手的期望运动进行轨迹规划,自适应控制律结合滑模控制方法可以对扰动信号进行补偿,进而实现机械手控制系统的稳定。文献[6]针对在机械手关节位置跟踪中传统滑模控制器存在控制输入抖振和模型受限等问题,提出一种基于新型非线性干扰观测器的机械手自适应反演滑模控制(SMC)算法。首先,设计干扰观测器对系统干扰进行观测和估计,并且在后续滑模控制器设计时进行估计补偿;其次,提出自适应反演控制律可以进一步改善机械手控制系统的跟踪性能。文献[7]针对不确定机械手系统的轨迹跟踪控制问题, 提出了一种基于干扰观测器的机械手收缩反步控制算法。采用非线性观测器对机械手系统的模型不确定项和未知外部干扰部分进行观测,将上述提出的控制方法应用于机械手, 通过滑模控制方法和反步法的对比仿真, 证明其有效性。为解决平台与安装机器人机械手之间的扰动、非线性、非完整约束和动态耦合问题,文献[8]介绍了一种基于反步法的自适应滑模控制器,该控制算法依赖于采用反步法来提高全局极限渐近稳定性和应用滑模控制来获得对不确定性的高响应和不变性,仿真结果证明了其有效性和鲁棒性。
系统模型参数变化、建模不确定性以及建模误差往往会对控制器设计带来不可忽略的挑战。文献[9]提出基于FDO的非线性滑模控制方法, 与此同时,不需要提前知道不确定性的大小,使用自适应方法估计并在后续控制器设计中进行了补偿。该方法与其他的非线性SMC相比,系统的控制精度和鲁棒性更高。文献[10]针对多关节机械手在建模过程中存在建模误差及建模过程中不确定性等问题,提出将神经网络干扰观测器思想引入滑模控制器设计中,在无需提前知道不确定性干扰的上界先验知识,设计神经网络观测器对不确定性干扰进行逼近,通过李雅普诺夫进行了稳定性证明,通过MATLAB仿真结果表明该控制算法能够有效地提高机械手跟踪控制精度。为了降低机械手运动时存在轨迹偏差,文献[11]设计了6自由度机械手模型并对末端执行器进行运动轨迹规划,利用RBF神经网络训练离散点,实验结果表明轨迹优化合理,对机械手生产应用有一定的指导意义。文献[12]针对欠驱动柔性机械手系统动力学方程难以准确建立、系统性能降低的问题, 通过自适应神经网络在线对机械手关节进行切换控制,数字仿真验证了所提出控制策略的有效性。
基于以上文献分析,本文针对柔性机械手被控对象模型复杂及具有强非线性等情况,提出了一种将RBF神经网络思想引入反演控制器设计中。设计RBF神经网络逼近被控对象中模型未知函数,可以对未知函数进行有效地观测和估计,从而进一步提高柔性机械手控制系统的鲁棒性和控制精度。
1 问题描述
1.1 柔性机械手动力学模型
针对机械手系统模型比较复杂的问题,通过合理假设,柔性机械手动态方程可以改写成
(1)
式中:柔性力臂和电机的转动角度分别为q1(q1∈Rn)和q2(q2∈Rn);I表示力臂的转动惯量;K表示力臂的刚度;u表示控制输入;J为转动惯量;M为力臂的质量;L为力臂质心到关节点长度。

(2)
1.2 动力学模型变换
为了实现柔性机械手的反演控制,将式(2)进一步改写成
(3)

1.3 径向基函数(RBF)神经网络
径向基函数结构简单、训练简洁、学习收敛速度快、能够逼近任意非线性函数,克服局部极小值问题[13]。
对于在Ω∈R上的未知非线性函数g(x),可利用RBF神经网络逼近,表示为
g(x)=WTθ(x)+ε
(4)
式中:x∈Ω∈R是输入向量;W∈Rl是最优权重向量;l>1;ε是固有逼近误差,满足|ε|≤εm,其中εm>0为神经网络逼近误差的上界;θ(x)=[θ1(x),θ2(x),…,θl(x)]T为平滑向量。径向基函数一般选择高斯函数,表达式为
(5)

2 反演控制器设计
2.1 基本反演控制器的设计
定义位置误差e1=x1-x1d, 位置指令x1d=yd。
(6)
定义
e2=x2-x2d
(7)
式中x2d为虚拟控制量。
设计虚拟控制量x2d:
(8)
式中k1>0。
由式(6)和式(8)可得:
(9)
选择Lyapunov函数如下:
(10)
对V1进行求导可得
(11)
由式(7)可得
(12)
定义
e3=x3-x3d
取虚拟控制量x3d为
(13)
由式(8)可得
(14)
由式(12)和式(13)可得
(15)
设计Lyapunov函数如下:
(16)
对V2进行求导可得
(17)
定义
(18)
由式(13)—式(16)可得
(19)

(20)
式中:
(21)
(22)

定义e4=x4-x4d,虚拟控制量x4d设计为
(23)
式中k3>0。
将式(20)—式(23)代入式(18)可得
(24)
选择Lyapunov函数如下:
(25)
对V3求导可得
(26)

将控制输入信号引入可得
(27)
则
(28)

(29)
(30)

控制律设计为
(31)

将式(31)代入式(30),可得
(32)
选择Lyapunov函数如下:
(33)
则
(34)

2.2 RBF神经网络反演控制器设计
(35)

定义
(36)

定义
(37)
(38)
选择Lyapunov函数如下:
(39)
式中:
设计RBF神经网络自适应律为
(40)

证明:
由式(34)和式(39)可得:
(41)

(42)

引入自适应律式(40),可得
(43)
为了保证M≤0,不妨设计自适应律为
(44)
将式(44)代入M,为保证M≤0,需满足如下3种情况:
1)当e4u>0,M=0;
根据Schwarz不等式,有
由于
当满足如下方程
(45)
式(43)可进一步改写为
(46)
(47)
(48)
(49)
3 数字仿真分析

bi=8;网络的初始权值为0。
在神经网络自适应控制律式(40)中,选取n=0.01,
J=0.216。
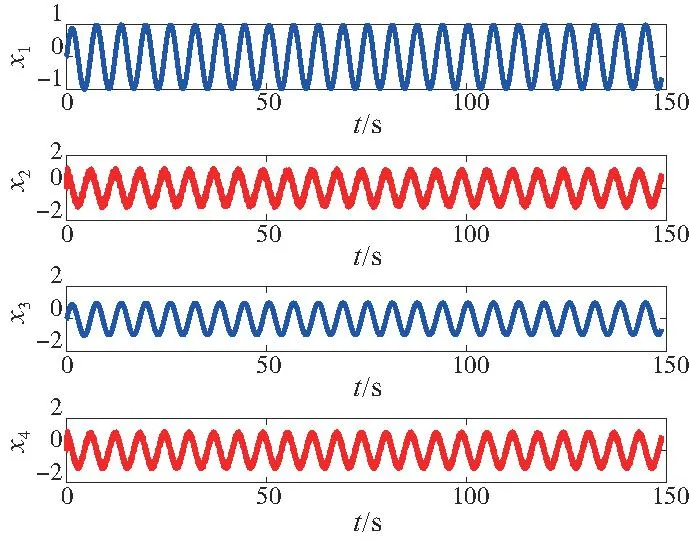
图1 系统状态量变化
图1表示系统的4个状态变化量x1,x2,x3,x4。图2为位置跟踪图,实线表示给定的指令,虚线代表位置的跟踪。由图1和图2可以看出,系统状态量稳定且可以很好地跟踪到给定的指令位置。图3仿真结果可以看出系统的控制输入稳定在一定范围内。由图4仿真结果不难看出,RBF神经网络对未知的非线性函数具有很好的逼近效果。
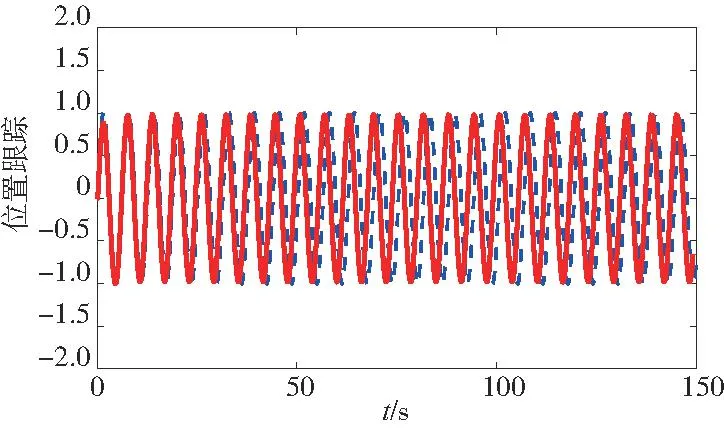
图2 位置跟踪图
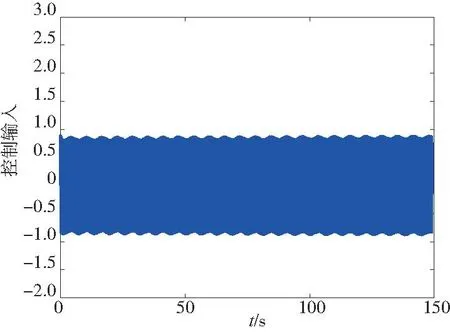
图3 控制输入响应曲线
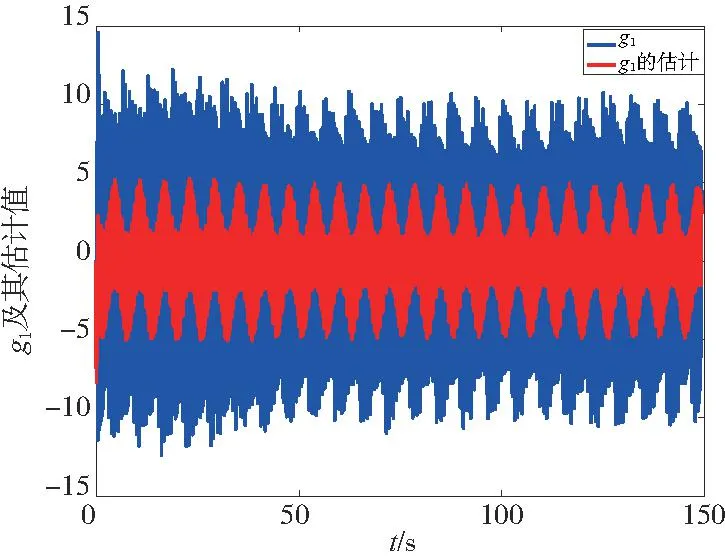
图4 非线性函数g1及其估计值
4 结语
本文针对被控对象柔性机械手模型复杂及具有强非线性等情况,提出了一种将RBF神经网络思想引入反演控制器设计中。主要研究内容如下:
1)基于反演控制理论,将原复杂的高阶非线性系统分解成低阶简单系统,极大简化了控制器直接设计的难度;
2)针对被控对象模型中存在的未知非线性函数,设计RBF神经网络能够对未知的非线性函数进行很好的逼近,可以有效地提高控制器的性能和鲁棒性。
本文选择合适的仿真参数确保了控制输入在一定合理范围,但在实际工程中,控制器输入往往会存在饱和情况,而在本文控制输入饱和特性并未考虑进去,在未来的研究中会进一步考虑控制输入饱和特性,以提高机械手控制系统的鲁棒性。
