非线性主动悬架自适应滑模反步控制研究
2024-01-03赵培通陈培苑桂永建严天一
赵培通, 陈培苑, 桂永建, 严天一
(1.青岛大学机电工程学院, 山东 青岛 266071; 2.内蒙古工业大学电力学院, 内蒙古 呼和浩特 010080)
悬架系统是指车身和车轮之间连接装置的总称,其主要功能是承载整车车身质量,缓解路面不平度激励引起的冲击载荷,衰减振动,确保车辆行驶安全性和乘坐舒适性[1]。与被动悬架不同,主动悬架在弹性元件和阻尼元件外,并联安装了作动器。主动悬架通过将作动器产生的可控作用力作用于簧载质量,有效降低簧载质量振动,改善车辆行驶平顺性,因而对主动悬架的控制研究具有重要意义。目前,针对主动悬架控制,国内外学者进行了大量研究。A.AELA等人[2]提出了一种自适应神经网络控制算法;S.BONGAIN等人[3]针对电液主动悬架提出了一种模糊神经控制算法;LI M等人[4]提出了一种粒子群算法与梯度下降法的模糊神经网络参数优化算法,验证了该控制策略能提高车辆的行驶性能;BAI R人[5]提出了一种改进的主动悬架模型,并在此模型基础上设计了一种主动悬架滑模控制方法,实验证明了该滑模控制方法对主动悬架具有良好的控制性能;WEI S等人[6]设计了一种基于量子粒群的主动悬架滑模控制器,优化后的滑模控制器对主动悬架能起到良好的控制效果;ZHANG J等人[7]设计了一种改进SSUKF观测器和滑模力跟踪器的新型控制系统,能显著抑制车身运动,改善乘坐舒适性;寇发荣等人[8]提出了一种基于路面等级自适应的主动悬架线性二次高斯控制(linear quadratic gaussian,LQG)控制,与传统的LQG控制相比,对主动悬架系统平顺性有更好的控制效果;庞辉等人[9]提出了一种考虑参数不确定性的混合H2/H∞最优保性能策略;龙江启等人[10]在SMCRSM算法基础上构建了一种线性干扰观测器,完善了基于参考天棚模型的滑模控制算法;周辰雨等人[11]在线性滤波器的基础上,通过设计自适应函数,构建了自适应非线性滤波反步控制器,实现悬架动挠度的低通带宽的自适应调节。基于此,针对主动悬架系统非线性特性和参数不确定性问题,本文提出一种自适应滑模反步控制策略,建立了二自由度1/4非线性主动悬架模型。在考虑悬架系统参数不确定性的条件下,提出了一种自适应滑模反步控制策略;通过对比,分析被动悬架与所提出的控制方法在凸块路面和随机路面激励下主动悬架系统仿真结果,验证了自适应滑模反步控制算法的有效性。
1 非线性主动悬架模型
本文主要研究悬架的垂向动态性能,选用1/4主动悬架系统。二自由度主动悬架模型如图1所示,悬架系统可简化为具有非线性弹簧、非线性阻尼器和作动器的二自由度振动模型。图中,m1、m2分别为悬架系统的簧载质量和非簧载质量;z1、z2分别为簧载质量和非簧载质量相对平衡位置的位移;q表示来自路面的激励;Fs为非线性弹簧的弹簧力;Fc为非线性阻尼器的阻尼力;u为作动器输出的控制力;kt为等效轮胎的弹簧刚度系数。
根据牛顿第二定律,二自由度1/4主动悬架的运动方程为
(1)
定义状态变量
状态向量x=[x1,x2,x3,x4],将二自由度悬架系统的运动方程,改写为状态空间表达式的形式,即
(2)
为了更加准确的描述悬架非线性力的性质,结合文献[12],可将悬架参数测量装置测得数据进行函数非线性拟合。使用Carsim中某C级车辆的前轮悬架数据,得到弹簧力的非线性拟合曲线如图2,阻尼力的非线性拟合曲线如图3所示。
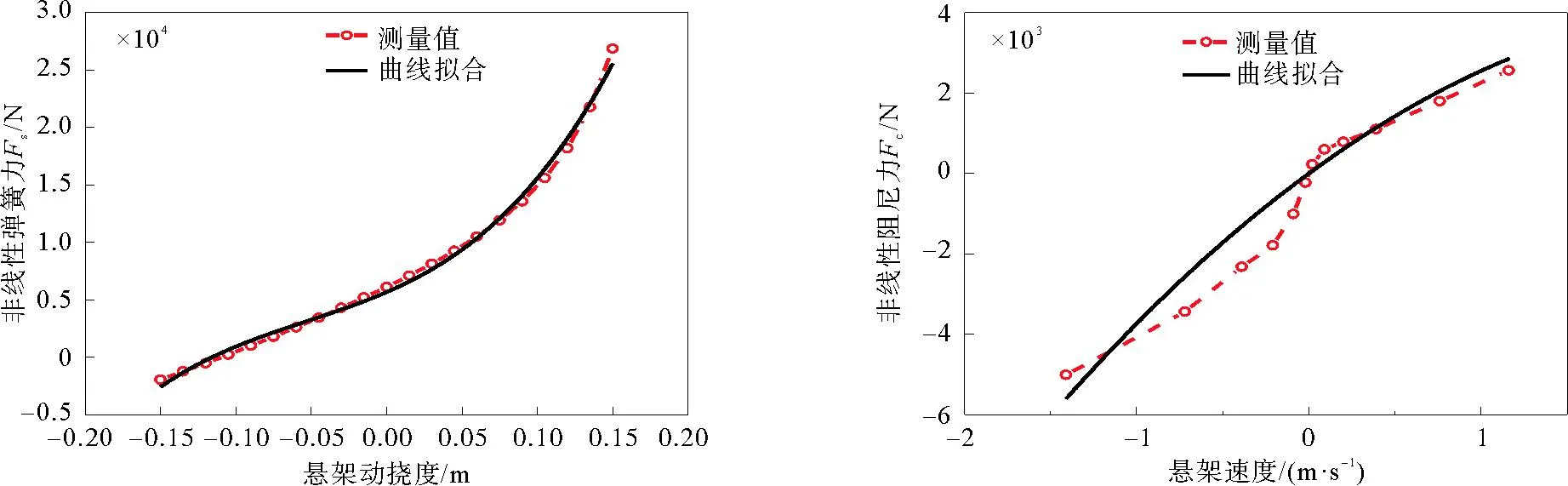
图2 弹簧力的非线性拟合曲线
非线性弹簧力拟合成三阶多项式的形式,即
fs=fs1+fs2=ks0+ks1(x1-x3)+ks2(x1-x3)2+ks3(x1-x3)3
(3)
式中,fs1、fs2分别为线性弹性力和非线性弹性力;ks0为悬架系统簧上质量的静态弹性形变;ks1=124 000、ks2=404 800、ks3=2 770 000为拟合得到的刚度系数。
此时,二自由度悬架系统模型的非线性弹簧力Fs与拟合得到的函数关系为
Fs=ks1(x1-x3)+ks2(x1-x3)2+ks3(x1-x3)3
(4)
非线性阻尼力可拟合成一个二次多项式的形式,即
fd=fd1+fd2=b1(x2-x4)+b2(x2-x4)2
(5)
式中,fd1、fd2分别为线性阻尼力和非线性阻尼力;b1=3 413、b2=-590.9分别为拟合得到的线性阻尼系数与非线性阻尼系数。
二自由度悬架模型中的非线性阻尼力Fc与拟合函数的关系为
Fc=fd=b1(x2-x4)+b2(x2-x4)2
(6)
2 自适应滑模反步控制器设计
车辆实际使用过程中,由于簧上质量m1随着乘客数量和车辆载重的变化而变化,因而在设计控制算法时,将簧上质量m1设定为主动悬架系统的不确定参数,并设定其边界值。不确定参数θ与簧载质量m1的关系为
(7)
将式(7)带入式(2),则系统的状态空间为
(8)
将1/4主动悬架系统的非簧载质量垂向位移x3通过一个滤波器[13],得到滤波后的非簧载质量垂向位移
与x3的关系为
(9)
式中,b为正数。根据反步法的设计思想,首先定义跟踪误差e1的关系式为
(10)
此时,对跟踪误差e1求导得
(11)
选取x2作为式(11)的虚拟控制输入,设其理想虚拟输入函数为x2d,此时定义虚拟控制输入x2与理想虚拟输入x2d的误差e2为
e2=x2-x2d
(12)
为了使跟踪误差足够小,选取第1个Lyapunov函数为
(13)
选取理想虚拟输入x2d为
x2d=-αe1-b(x1-x3)
(14)
式中,α为正数。此时,e1的导数可写为
(15)
对式(13)求导,得
(16)

为了降低控制量抖振,提高系统的鲁棒性,在实际控制出现之前,定义滑模面为
s=k1e1+e2
(17)
式中,k1为常数。此时,构造第2个Lyapunov函数为
(18)
(19)

对式(18)求导,得

(20)
选取系统实际控制量为
(21)

3 仿真分析
为了验证本文所提控制器的控制效果,考虑图1所示的二自由度非线性主动悬架模型,结合自适应滑模反步控制算法所设计的控制器,在Simulink中建立控制器仿真模型,Simulink仿真模型如图4所示,主动悬架仿真参数如表1所示。

表1 主动悬架仿真参数
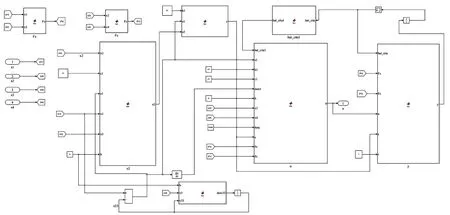
图4 Simulink仿真模型
在车辆悬架系统研究过程中,路面输入模型作为一项基本输入条件,会对乘坐舒适性造成影响,建立更接近实际路况的路面输入模型,是悬架系统仿真分析及客观评价系统相关性能指标的关键。本文结合相关文献[14-15],分别建立凸块路面激励模型和随机路面激励模型。
3.1 凸块路面激励响应
凸块路面模型模拟的是实际路面上的减速带等孤立冲击工况,即
(22)
式中,h和l分别表示凸块的高度和长度,取h=0.05 m,l=5 m;v表示汽车匀速行驶的车速,v=10 m/s。
当m1=350 kg时,车身垂向加速度响应曲线如图5所示,轮胎动变形响应曲线如图6所示。由图5可以看出,对比被动悬架,在凸块路面激励下,车身垂向加速度响应峰值更小,到达稳定的时间更短,有效地改善了乘坐舒适性;由图6可以看出,轮胎动变形的幅值降低,轮胎垂向变形恢复时间更短,很好地改善了车辆行驶稳定性。在凸路面激励下,与被动悬架相比,悬架控制效果显著提升。
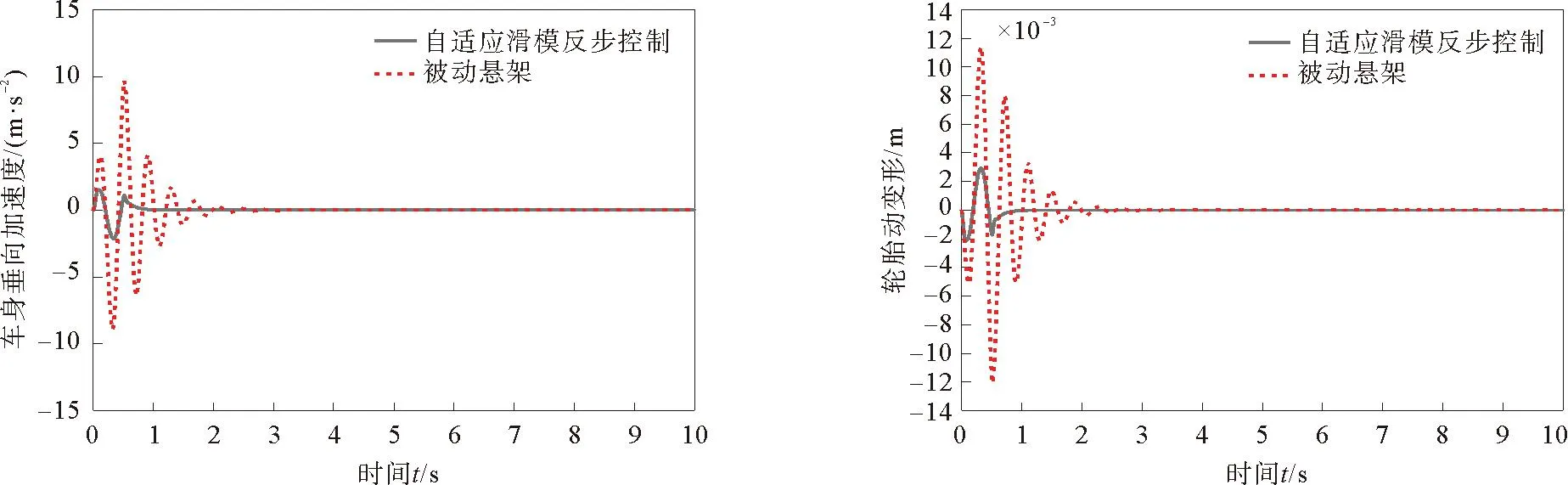
图5 车身垂向加速度响应曲线
3.2 随机路面激励响应
选取B级路面模型作为随机路面激励,其中模型时域表达式为
(23)
式中,q(t)表示路面不平度位移,m;v表示车速,v=10 m/s;n1=0.01 m表示空间截止频率;n0=0.1 m表示标准空间频率;w(t)表示t时刻系统噪声;Gq(n0)表示路面不平度系数,其中Gq(n0)=6.4×10-5m3。
在B级路面激励下,分析m1=350 kg时,自适应滑模反步控制器和被动悬架的车身垂向加速度。车身垂向加速度响应曲线如图7所示,轮胎动变形响应曲线如图8所示。
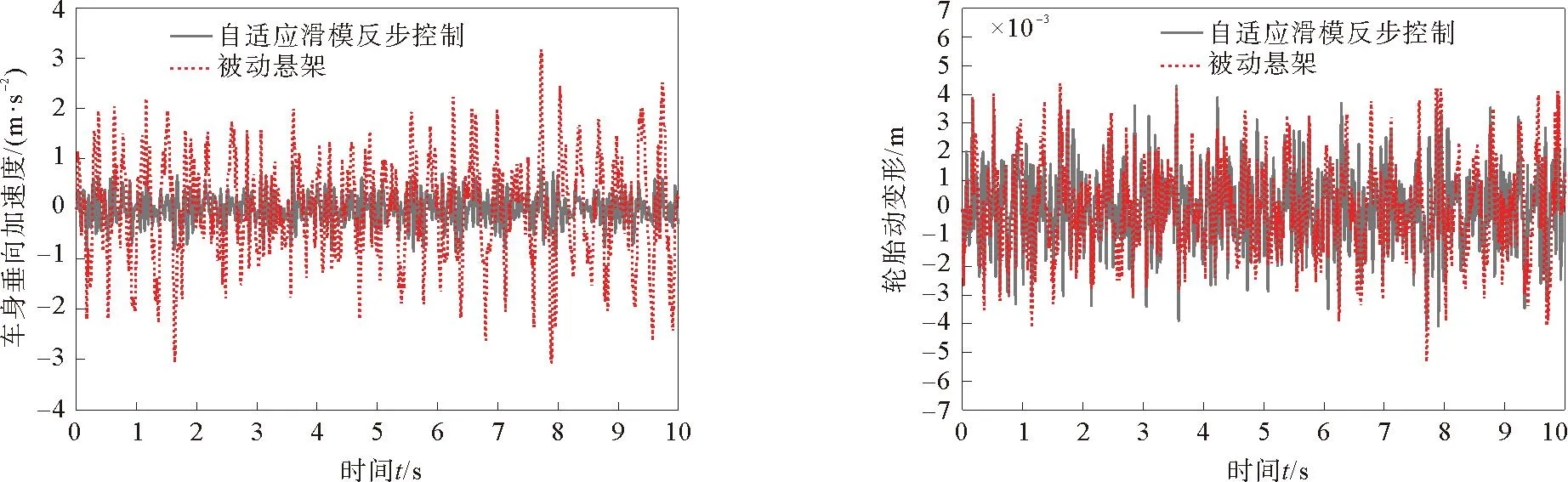
图7 车身垂向加速度响应曲线
由图7和图8可以看出,在随机路面激励下,车身垂向加速度和轮胎动变形更小,在随机路面激励下,相比于被动悬架有更好的控制效果。
3.3 不确定性分析
为了分析所提出的自适应滑模反步控制器对非线性主动悬架参数不确定模型的鲁棒性,设定仿真时间为10 s,分析在B级路面工况下,车速10 m/s,簧上质量为370,350,330 kg时,被动悬架性能指标如表2所示,自适应滑模反步控制器性能指标如表3所示。
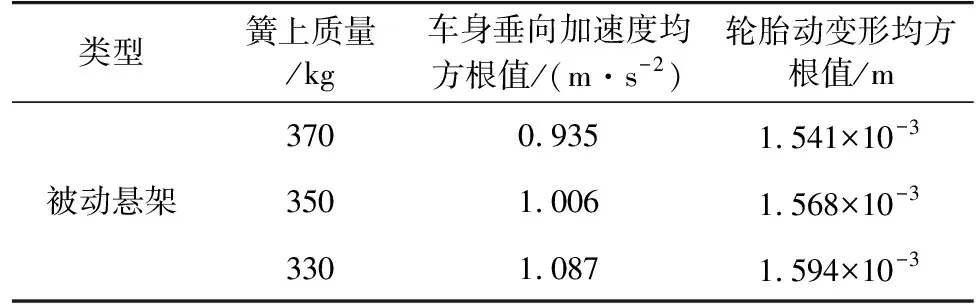
表2 被动悬架性能指标
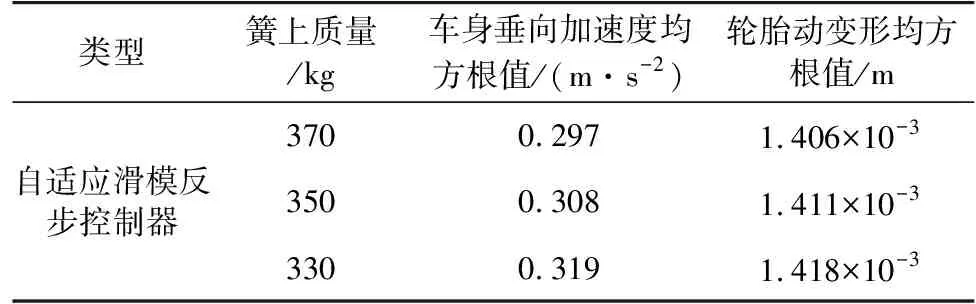
表3 自适应滑模反步控制器性能指标
由表2和表3可以看出,相比于被动悬架,该控制器车身垂向加速度的均方根值减少了70%左右,乘坐舒适性得到较大提升;轮胎动变形均方根值减小了10%左右,车辆稳定性得到了一定优化。当簧载质量由370 kg变为330 kg时,被动悬架车身垂向加速度均方根值增加了14%,自适应滑模反步控制器控制的悬架车身垂向加速度增加了7%,说明该控制器的鲁棒性更好。
4 结束语
本文针对主动悬架非线性特性和系统参数不确定性问题,建立了二自由度1/4非线性主动悬架模型,在考虑悬架模型参数不确定性的基础上,提出了自适应滑模反步控制策略。通过对被动悬架与自适应滑模反步控制的主动悬架在凸块路面和随机路面激励下仿真实验的对比分析,结果表明,该自适应滑模反步控制算法有效改善了车辆运行过程中的平顺性和乘坐舒适性,减小了参数不确定性带来的影响。但本文未对整车控制过程中算法的有效性进行验证,下一步将建立整车模型,验证整车控制下算法的有效性。