基于车路协同技术的超高速公路虚拟轨道系统研究
2024-01-01何永明权聪邢婉钰





关键词: 公路运输;超高速公路;车路协同;虚拟轨道;定位系统
中图分类号: U 495 文献标识码: A DOI: 10.3969/j.issn.1674-8484.2024.03.016
1951 年版《公路工程设计准则( 草案)》首次规定我国公路最高设计车速为120 km / h,并沿用至今[1]。欧美发达国家高速公路最高限速大多超过120 km / h,德国大部分高速公路甚至不设限速[2]。2016 年,研究团队首次提出了超高速公路的概念,即车速超过120 km/h的高速公路[3]。随后对超高速公路的可行性、必要性[4]、安全性[5]、经济性[6] 进行了多次论证,结果表明安全性是超高速公路面临的最大问题。
超高速公路概念的提出受到业内广泛关注。裘连毅[7] 研究了超高速公路曲线型超高横断面的设计方法。刘展行[8] 提出了超高速公路详细的设计方案以及需要解决的主要技术难题。赵酉超等[9] 研究了超高速公路的理论通行能力。张明凯等[10] 建立了“超级”高速公路的车路协同方案。陈芬菲等[11] 为超高速公路未来发展提出建议。梁天霄等[12] 设计了八车道高速公路客车专用车道。张焕炯[13] 研究了“超级高速公路”的关键性支撑技术。林耳东[14] 建立了超高速公路跟驰最小安全距离模型。张航等[15] 等提出了圆曲线半径的可靠度功能函数。
车路协同系统采用无线通信和互联网等技术,全方位实施车车、车路动态实时信息交互。车路协同技术的出现,为智能网联汽车的研究提供了新的方向[16],也为智能交通系统提供了研究方向[17]。车路协同技术不仅要从道路的角度考虑问题,还需要“聪明的车”参与,才可以使车辆更加安全而且智能,才能够为超高速公路提供安全保障[18]。
为提高超高速公路行驶安全性,本研究团队建立了基于智能路钮的超高速公路虚拟轨道系统[19] 和基于高精地图的超高速公路虚拟轨道系统[20],并建立了基于车路协同的超高速公路虚拟轨道系统车辆坐标转换模型[21]。本文基于车路协同技术,进一步完善超高速公路虚拟轨道系统,利用车载单元和路侧单元实时通讯技术将车辆限制在虚拟轨道内行驶,以期最大限度地保证车辆安全。
1 智能车辆的选择
根据目前美国汽车工程师学会(Society of AutomotiveEngineers,SAE) 分级的方法,可将自动驾驶车辆分为L0、L1、L2、L3、L4、L5 这6 个级别,级别越高代表自动驾驶的质量越高。
根据SAE 的分级方法,L3 以下的为高级辅助自动驾驶,L3 及其以上的属于自动驾驶范畴,L3 也被认为是辅助驾驶和自动驾驶的分水岭。在L3 及以上等级中,将会由车辆完成绝大部分操作,驾驶员只是辅助车辆行驶。在L3 中,驾驶员在车辆自动驾驶时也需要保持一定的注意力,以防出现紧急情况以便于及时接管车辆。在L5 中,驾驶员无需保持注意力,任由车辆自动驾驶并且感知、决策、控制和执行一系列操作。
自动驾驶车辆依据安装在智能车辆上传感器位置及数量的不同,可以分为1R、1V、1R1V、3R1V、5R1V、6R1V、5R1V+1D、5R6V+1D(或5R7V+1D)等多个种类,其中R指radar(雷达),V指video camera(摄像头),D代指domain control(域控制器)。
本研究中使用的自动驾驶车辆为5R6V+1D( 或5R7V+1D),并在此基础上增添了多个摄像头:车身前端和前风挡侧放置2~3 个摄像头,分别为广角探测摄像头和窄角探测摄像头。广角探测摄像头探测距离较小但探测角度、范围大,窄角探测摄像头探测距离远但探测角度、范围较小。车身周围放置2 个向前探测摄像头和2 个向后探测摄像头。此种车辆使用检测范围更广、安全系数更高、传输效率更快。
2 车辆横向偏转安全角度确定
2.1 车辆横向偏转角度阈值设定
根据GB/T 26773-2011 并结合实际情况,车道宽度取4.0 m,无警戒区域范围设为2.4 m,最早偏离警戒线与警告阈值的距离为0.4 m,警告阈值与车道边界的距离为0.4 m,车道边界与车道外侧最晚偏离警戒线的距离为0.3 m。当车身右前侧与右侧最早偏离警戒线接触,车身左后侧正好与左侧最早偏离警戒线相交时,认为车辆开始向右偏离,此时的偏转角度为最小偏转角度阈值。当车辆位于此处,并且满足警告条件没有控制请求的时候,将会发出车道偏离警告,如图1和图2所示。
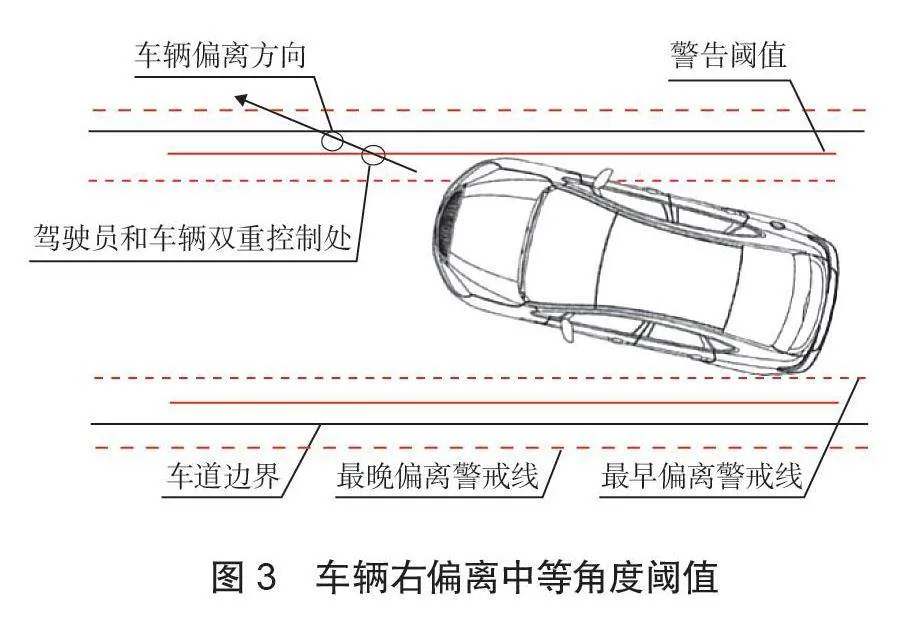
当车身右前侧与右侧警告阈值线相交,车身左后侧恰好与左侧最早偏离警戒线相交,认为此时开始发出车道偏离警告,此时偏转角度为中等偏转角度阈值。车辆位于此处时,会发出车道偏离警告,此处为驾驶员和车辆双重控制区域,如图3所示。
当车身右前侧与右侧最晚偏离警戒线相交时,车身左后侧正好与左侧最早偏离警戒线相交,认为是车道偏离最晚位置,此时的偏转角度为最大偏转角度阈值。当车辆位于此处时,会发出车道偏离警告,此处为车辆单独控制区域,如图4所示。
当车身右前侧分别与右侧最早偏离警戒线、警告阈值线、最晚偏离警戒线相交时,车辆左后侧正好与左侧最早偏离警戒线相交,此时车辆偏转角度分别为最小偏转角度、中等偏转角度、最大偏转角度,具体计算模型如图5所示。
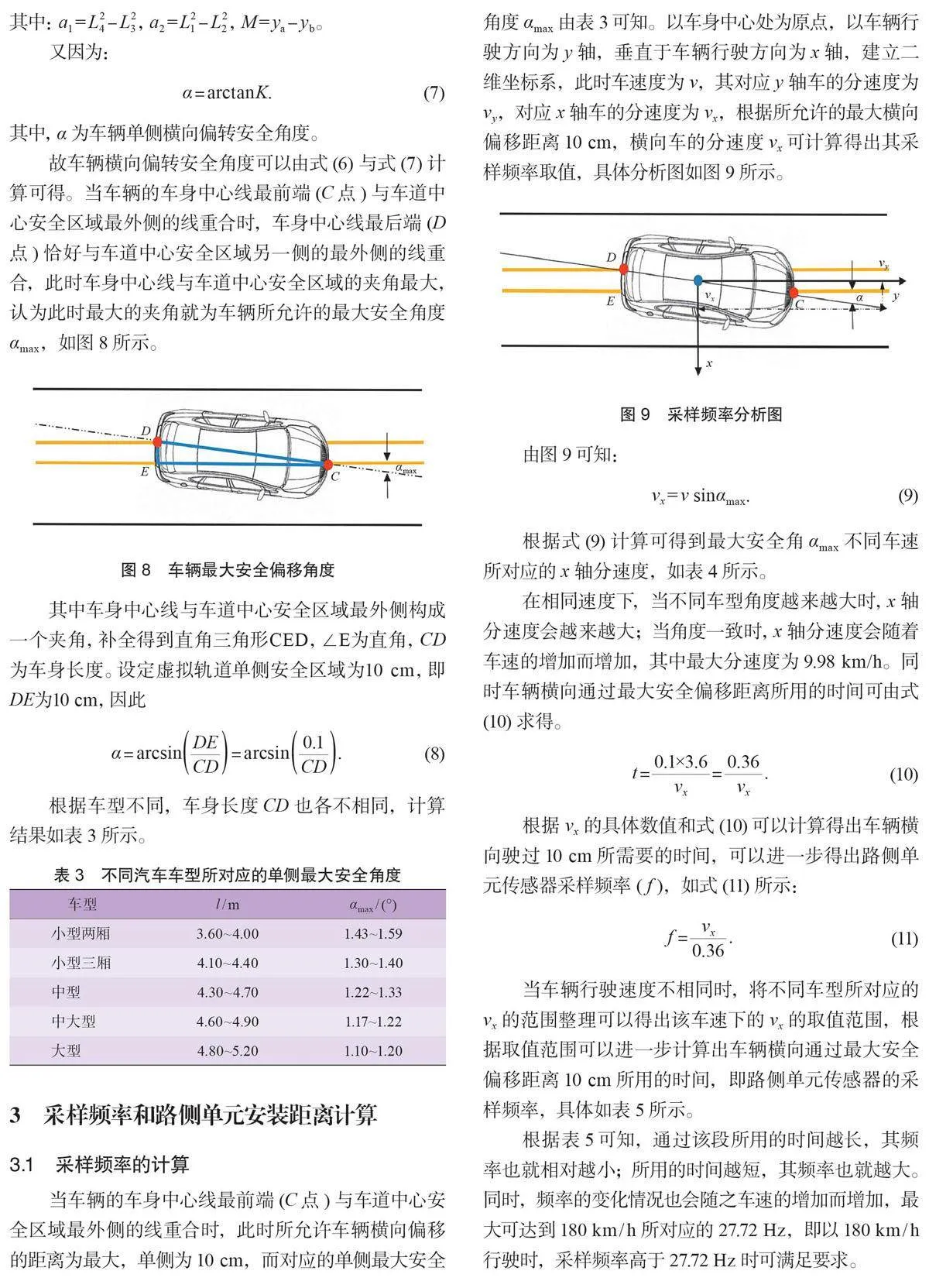
根据图5 所示,车辆偏转角度理论值计算式如式(1)所示。
其中: θ 为车辆偏转角度理论值; l 为车身长度; w 为车身宽度; d 为右侧偏离交点与左侧警戒线的垂直距离。
根据《公路工程技术标准》(JTGB01-2014),小型客车的车身宽度为1.8~2.2 m,按照小型两厢、小型三厢、中型、中大型、大型分类,可分为3.6~4.0、4.1~4.4、4.3~4.7、4.6~4.9、4.8~5.2 m,范围取值为3.6~5.2 m。由图2—图5 并结合式(1) 可以得出车辆最小、中等、最大偏转角度阈值,如表2所示。
如表2所示,当车辆在超高速公路上行驶,超高速公路车道宽度为4.0 m,车身长度和宽度分别为3.6 m 和1.8m 时,车辆最小偏转角度阈值为10.04°,中等偏转角度阈值为18.52°,最大偏转角度阈值为33.85° ;车身长度、宽度为3.6 m 和2.2 m 时, 车辆最小偏转角度阈值为3.24°,中等偏转角度阈值为11.07°,最大偏转角度阈值为24.63° ;当车身长度、宽度为5.2 m 和1.8 m 时,车辆最小偏转角度阈值为6.77°,中等偏转角度阈值为12.10°,最大偏转角度阈值为20.41° ;当车身长度、宽度为5.2 m 和2.2 m 时,车辆最小偏转角度阈值为2.22°,中等偏转角度阈值为7.38°,最大偏转角度阈值为15.38°。
2.2 基于超高速公路的虚拟轨道系统模型构建
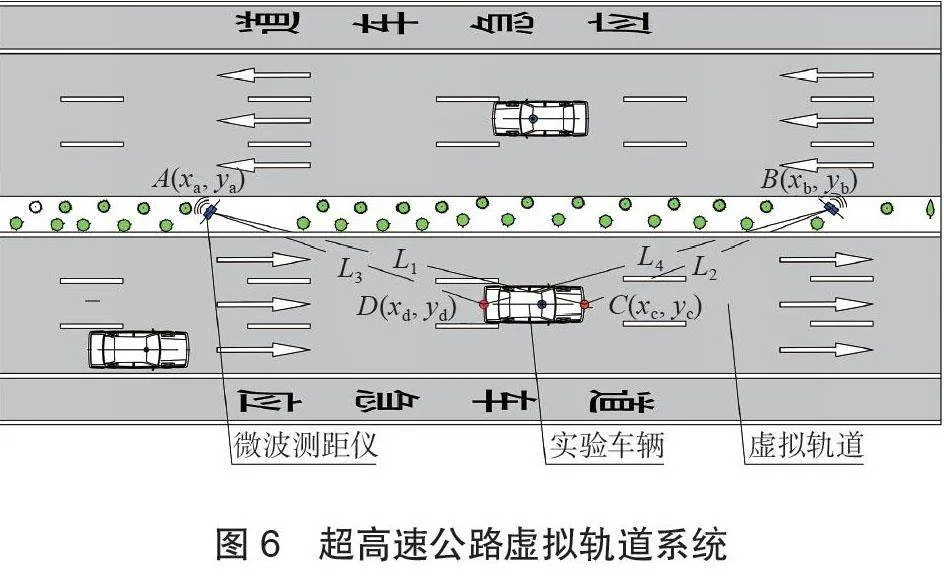
将自动驾驶车辆通过车路协同技术放置在超高速公路上进行行驶,建立基于车路协同技术的超高速公路虚拟轨道系统对目标进行研究分析。该系统由路侧单元、车辆、虚拟轨道( 默认为黄色区域)、车身中心线等部分组成。路侧单元主要由微波测距仪构成,车道中心区域指车身中心线处于车道中的安全区域。各部分组成如图5 和图6 所示。
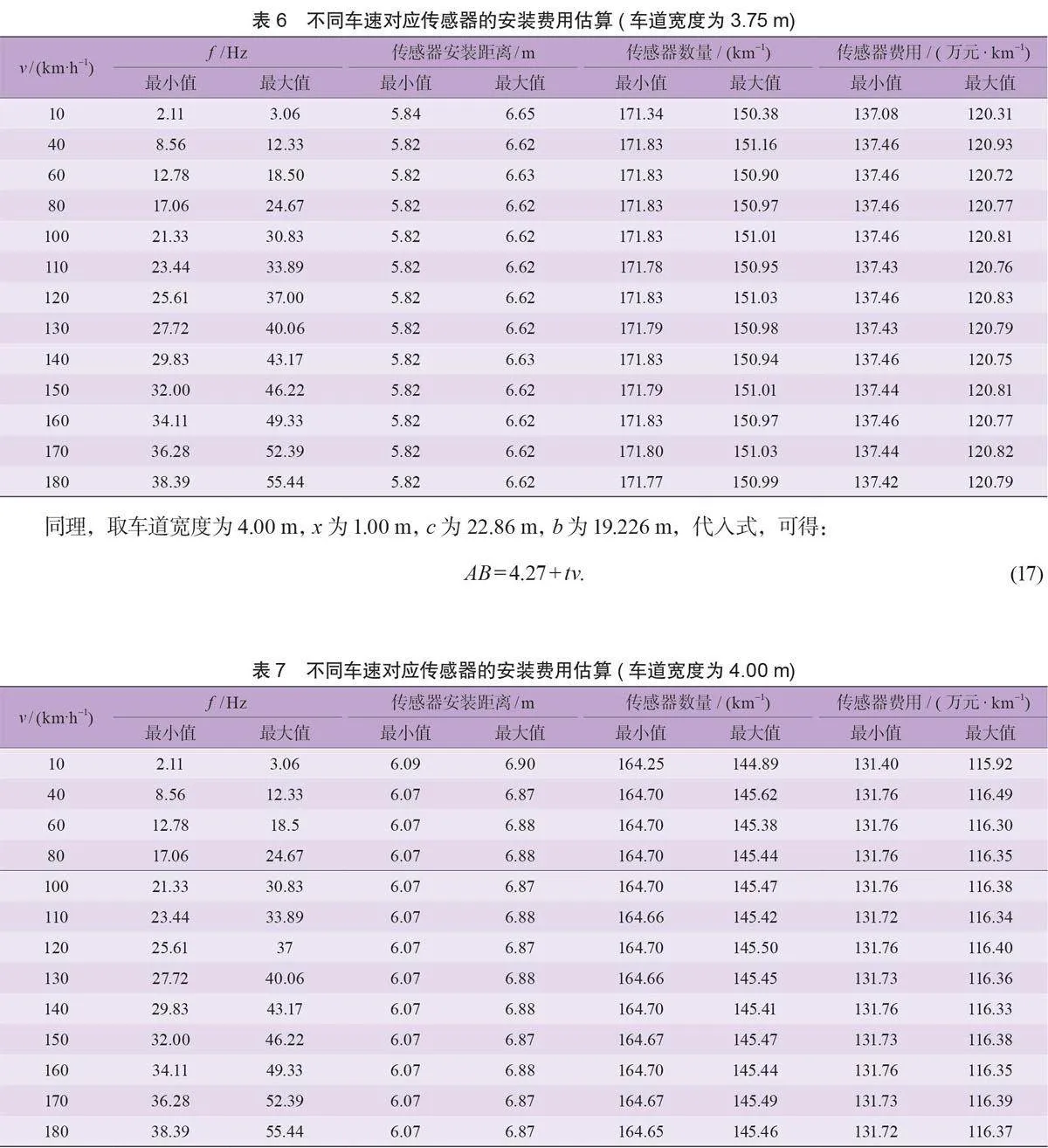
根据表5 结合式(16) 可得出在车道宽度为3.75 m 时,不同车速所对应的传感器的安装费用估算如表6 所示。
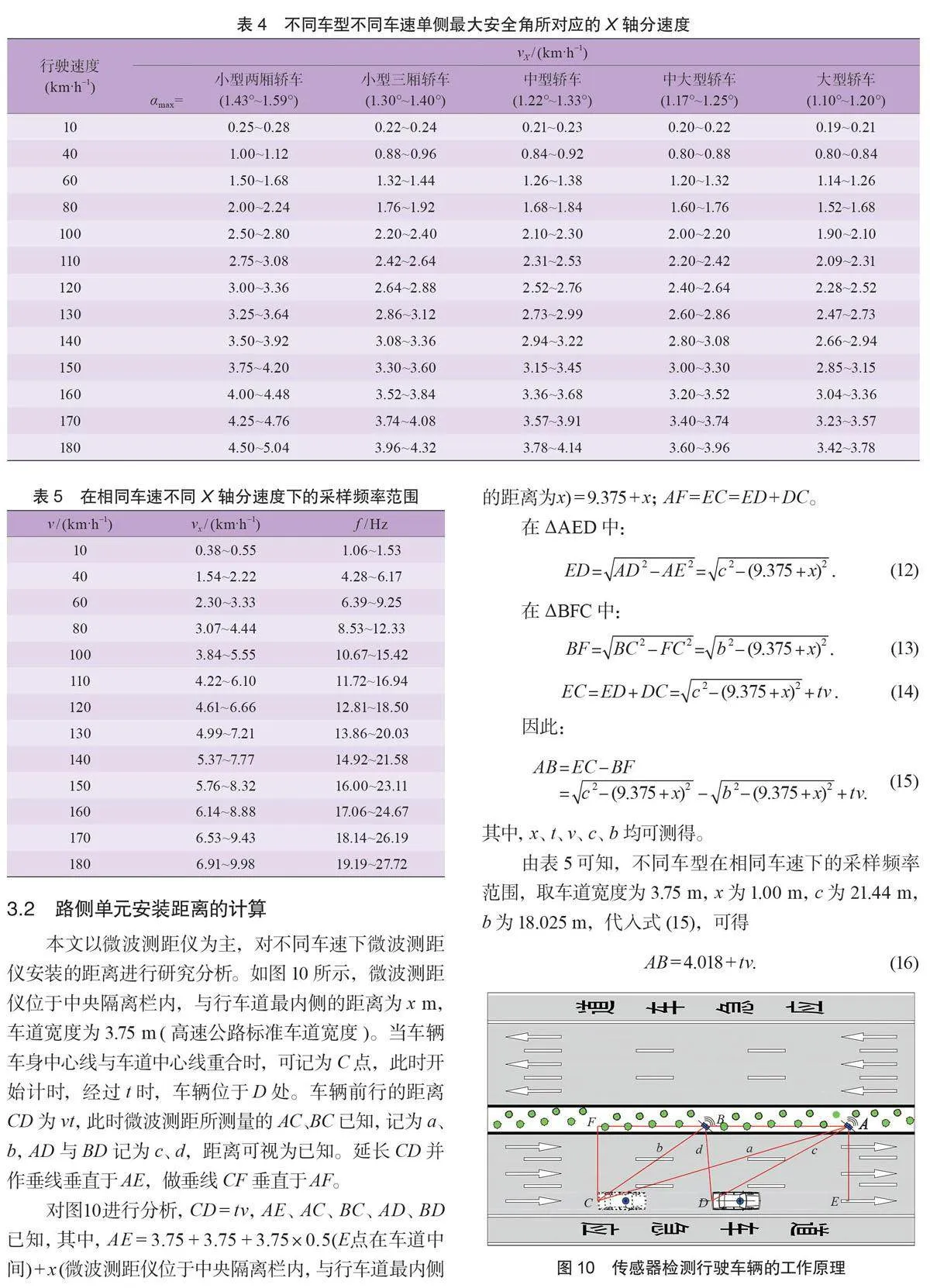
同理,取车道宽度为4.00 m,x 为1.00 m,c 为22.86 m,b 为19.226 m,代入式,可得:
AB = 4.27 + tv. (17)
根据表5 结合式(17) 可得出不同车速所对应的传感器的安装费用估算如表7 所示。
传感器与车辆的距离a、b、c、d 随着车辆的前进而发生变化,均可由传感器测得。由表6 和表7 可知,当车辆行驶速度一致时,传感器的采样频率与车道宽度无关,与车身长度、宽度有关;当车辆的行驶速度一致时,传感器的安装距离受车辆行驶速度的影响较小,受车道宽度的影响较大。当车道宽度为4.00 m,行驶速度为180 km/h 时,传感器的安装间距为6.87 m,费用为116.37 万元/ km;当车道宽度为3.75 m,行驶速度为180km/h 时,传感器的安装间距为6.62 m,费用为120.79 万元/ km。
4 结论
本文通过对行驶在超高速公路上的自动驾驶车辆以感知范围进行分类研究,选择检测范围更广、安全系数更高的5R6V + 1D 自动驾驶车辆作为实验类型,结合车道偏离预警区域和虚拟轨道安全区域,计算出不同类型车辆横向偏转最大安全角度,并建立了基于车路协同技术的超高速公路虚拟轨道系统。研究结果如下:
1) 根据车辆动态坐标,结合虚拟轨道单侧安全区域,计算车辆横向偏移距离和横向偏转最大安全角度,车辆横向偏转的最大安全角度按照小型两厢车、小型三厢车、中型车、中大型车、大型车可分为1.43° ~ 1.59°、1.30° ~ 1.40°、1.22° ~ 1.33°、1.17° ~ 1.25°、1.10° ~ 1.20°。
2) 通过分析车辆横向偏移的最大安全偏转角度,研究车辆在超高速公路上行驶时的路侧传感器的采样频率。当车辆行驶速度一致时,传感器的采样频率与车道宽度无关,与车身长度、宽度有关。当虚拟轨道单侧安全区域为10 cm 时,采样频率最大可达到180 km / h 所对应的27.72 Hz。
3) 在基于车路协同技术的超高速公路虚拟轨道系统的定位系统和路侧传感器检测系统的基础上,研究了微波测距模块安装间距随车速变化的情况。当车辆的行驶速度一致时,传感器的安装距离受车辆行驶速度的影响较小,受车道宽度的影响较大。在虚拟轨道单侧安全区域为10 cm,当车道宽度为4.00 m,行驶速度为180 km / h 时,传感器的安装间距范围为6.07~6.87 m。
目前国内外对超高速公路研究的文献并不多,参考资料也屈指可数。相对而言,车路协同技术发展得更加迅速,本文只是针对相关问题进行理论性的研究分析。后续将通过仿真模拟分析和实例进行进一步的验证研究,为超高速公路的研究提供更多理论支撑和技术支持。