智能网联环境下车载终端的发展现状与挑战
2024-01-01张永升李逸椆王亮等

关键词: 自动驾驶技术; 车载单元;网联化;智能网联;车辆通信
中图分类号: U 491 文献标识码: A DOI: 10.3969/j.issn.1674-8484.2024.03.002
近年来,智能网联技术由于在减少交通事故、提高生活质量和提高交通系统效率方面的巨大潜力[1-2],已日益受到政府、学术界与企业等多方的重视。中国现已出台《智能汽车创新发展战略》《智能网联汽车技术路线图》[3] 等重要文件,对基于智能化、网联化融合的发展方向提供了前瞻指导,推动智能网联技术与智能化集成产业深度融合[4]。
智能网联汽车是指集成了先进计算系统、车载传感器、控制器、执行器等装置[5],融合先进通信技术和自主控制技术[6],实现车与车、路、人、云等智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终实现替代人来操作的新一代汽车[7]。传统的自主式智能汽车由于完全依赖单车智能,为实现更高程度的智能驾驶,对单车平台的感知、决策和控制提出了极高要求。在复杂交通环境下,智能车辆仅依靠车载传感器往往难以达到全面准确的感知[8],尤其难以准确感知诸如道路拐角处、道路物体后方或超出传感器范围的道路网络前方等视野盲区的情况[9],意味着安全性能难以保障。相较之下,智能网联汽车(intelligentand connected vehicle,ICV) 结合了大数据、云计算、物联网(internet of thing,IoT) 和移动通信技术,通过智能网联(vehicle-to-everything,V2X) 通信,实现大范围区域内动态交通信息的感知与共享[10],显著提高感知能力与决策能力,解决自主式智能汽车难以克服的安全问题。
随着智能网联汽车的进一步发展,智能网联环境对作为车联网系统核心部件的智能车载终端系统提出了更多要求。智能车载终端(intelligent vehicleterminals,IVT) 作为车联网系统的重要组成部分,是安装在车联网场景下的智能嵌入式车载单元系统。搭载智能车载终端的车辆通过采用物联网、专用短程通信(dedicated short range communication,DSRC)、长期演进技术(long term evolution,LTE)、5G 移动通信、蜂窝车联网(cellular-V2X,C-V2X)、美国全球定位系统/ 中国北斗卫星导航系统 (global positioning system/ Beidou navigation satellite system,GPS/BDS) 等新兴无线技术,收集车辆状态信息,感知道路状况和环境,并获取车辆的实时位置信息。此外,智能车载终端还可以通过人机交互和显示功能进一步发展,以满足驾驶员在现实生活中的饮食、生活、旅行、购物和娱乐需求[11]。随着车联网技术的进一步发展完善,智能网联环境下智能车载终端从原先服务于车载自组织网络(vehicular Ad-hoc network,VANET) 的远程无线通信单元逐渐拓展为集V2X 信息互联共享、环境感知、车辆监测、决策控制、云端/ 边缘计算、智能交互等功能于一体的智能车载嵌入式系统,系统功能涵盖范围、集成度与智能化程度显著提高。
在应用开发领域,智能车载终端的发展潜力也逐渐为国内外汽车产商与互联网公司所重视,随着智能网联技术日益受到广泛关注,对相关技术的大量研发投入也加快了智能车载终端从试验走向成熟的进程。特斯拉(Tesla) 率先为其智能汽车开发的全自动驾驶(fullself-driving,FSD) 计算机,是一台专门用于高要求的自动驾驶工作负载的车载计算机,计划为当前和未来与全自动驾驶相关的数据处理需求提供硬件平台[12]。NVIDIA于2016 年推出了名为NVIDIA Drive PX2 的开放式人工智能车辆计算平台,该系统依赖于图形处理器(graphics processing unit,GPU) 旨在为自动驾驶汽车和驾驶员辅助功能的深度学习算法提供硬件基础[13-15]。除此之外,汽车制造商( 福特、沃尔沃等)、通信设备供应商( 华为、高通、英特尔等) 和领先的互联网公司(谷歌、百度等) 同样大力投资智能自动驾驶系统和通用车载单元等智能车载终端设备的制造[16]。
目前智能网联领域的综述更多集中于车联网架构、无线通信技术、人工智能算法、联网信息安全等领域,而对于智能车载终端在智能化网联化融合背景下的应用方向以及发展前景等方面缺乏系统性论述。
本文回顾了智能车载终端的发展历程,梳理了近年智能车载终端在各种车联网服务中的应用现状,并讨论了智能车载终端面临的种种挑战,旨在为未来的研究提供思路。具体对以下内容进行了详细分析和论述:
1) 分析了蜂窝车联网与专用短程通信2 种无线通信技术在5G 智能网联环境下的应用前景;
2) 回顾了车载终端的发展历程,总结智能车载终端在当前智能网联环境下的应用现状;
3) 指出目前智能车载终端仍然存在的技术挑战,从现有问题出发,分析未来发展方向。
1 智能车载终端发展
智能车载终端系统的发展依托于车辆通信研究,通过车与车通信、车与基础设施通信,可以为智能网联车辆提供各种可靠、强大的业务,如道路安全、拥堵控制和其他信息娱乐服务[17]。目前,具有通信能力的车载终端已广泛配置在车辆上,更智能的车载终端也有望随着智能网联技术的进一步发展而投入实际使用。
1.1 智能车载终端系统架构
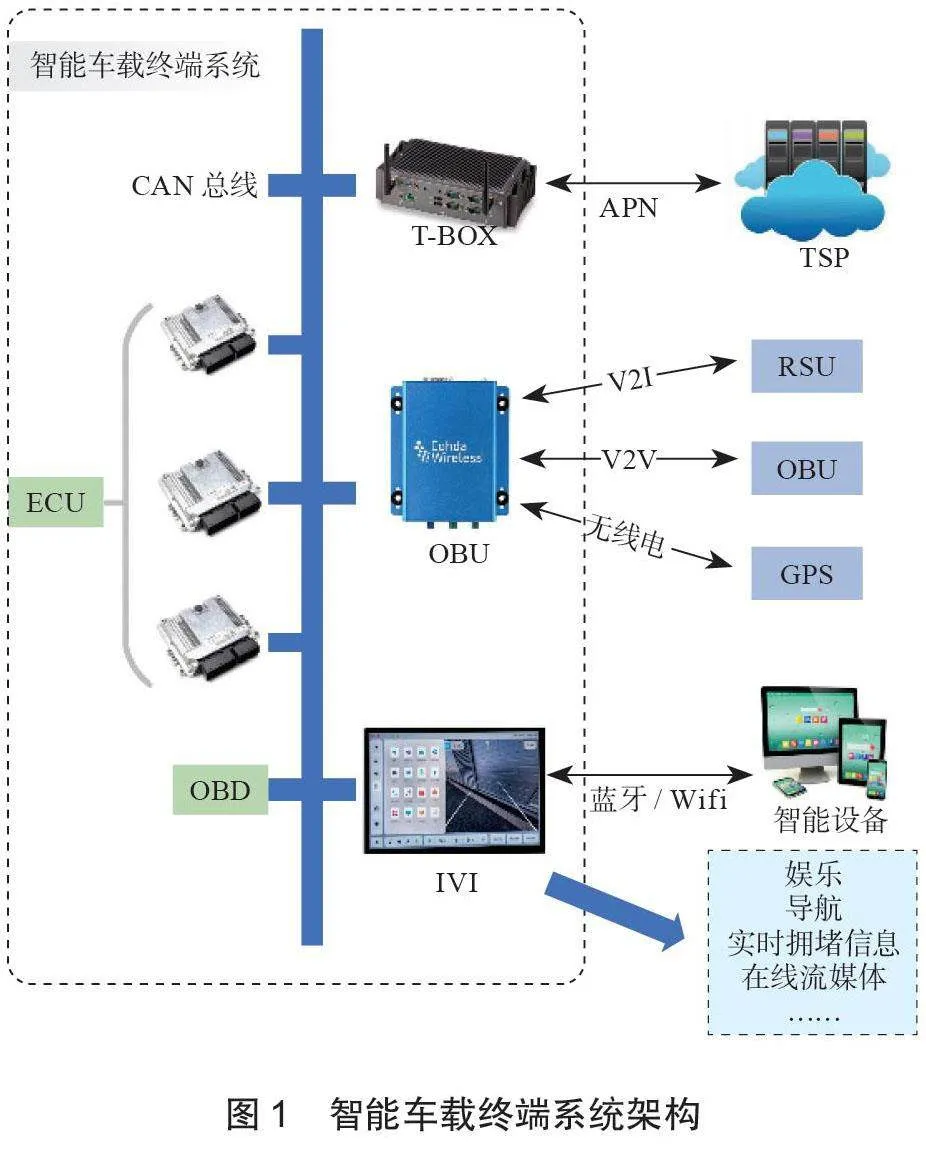
智能网联汽车搭载的智能车载终端系统以车载单元(on-board unit,OBU) 为核心,通过控制器局域网(controller area network,CAN) 总线连接包括电子控制单元(electronic control unit,ECU)、车载自诊断系统(on-board diagnostics,OBD)、远程通信终端(telematicsBOX,T-BOX) 以及车载信息娱乐系统(in-vehicleinfotainment,IVI) 等车载嵌入式设备,实现车端数据收集与转发、远程信息接收与处理、联网自动驾驶、智能人机交互等车联网服务。其总体架构如图1 所示[18]。
1) OBU 负责实现V2X 信息共享和远程无线通讯等车联网核心功能。作为安装在车端的智能终端,OBU 基本上包括内存、处理单元、GPS 接收器和用于短距离互联网连接的天线,提供车对车(vehicleto-vehicle,V2V) 通信或车对基础设施(vehicle-toinfrastructure,V2I) 通信[19]。
2) ECU由传感器和执行器组成的嵌入式设备,作为车辆的综合控制装置,负责监测从各车载传感器输入的车辆信息并控制有关执行器工作。
3) OBD负责实时监控传感器、执行器和ECU 的工作信号,记录车辆工况信息并进行故障诊断。
4) T-BOX 为整车提供远程通讯接口,是车辆和云服务器之间信息交换的关键组件。一方面,T-BOX 与CAN 总线通信,实现指令和信息的传输;另一方面,T-BOX 与云服务器或移动APP 通信,实现对车辆的远程控制[20]。
5) IVI 是基于车载网络和互联网服务的综合信息处理系统,具有通用集成主机的现代IVI 系统可以执行各种数据处理,为用户提供许多增值服务[21],如智能交互、多媒体娱乐、智能交通服务等,是驾驶员与智能网联汽车同外界连接的重要接口。
1.2 车载单元发展
早在智能交通系统(intelligent traffic system,ITS)概念提出时,车对车通信、车对路侧设施通信便被认为在解决行车安全、道路拥塞问题上具有巨大潜力,一直是ITS中的重要研究目标。20世纪90年代,出于服务车间通信和车路协同实验的需要,一些具有无线通信能力的早期车载单元被开发出来。1997年,加州PATH 团队利用8 辆乘用车以96 km/h 的速度和6.3m 的间隙距离展示了自动驾驶,该系统使用现成的无线局域网设备在900 MHz 频段内进行车间通信,以发送和接收来自前方车辆的加速和减速信息以及来自前方车辆的命令,且通过Delco Electronics 设计的平视显示器反馈重要信息[22]。从1987年到1994年, 被称为PROMETHEUS的欧洲ITS 项目开发了一种使用57 GHz 的车间通信系统,该系统利用专用的车间通信单元,以实现多辆车之间的协同驾驶[22]。1998年启动的美国交通部IVI项目在加利福尼亚州实验了使用通信技术的交叉口决策支持系统,该系统不仅可以从地面检测迎面而来的车辆,还可以将GPS 数据与车间和路对车通信数据相结合,以便在车载终端上显示其他车辆的位置[22-23]。
车载单元的进一步发展得益于专用短程通信技术的成熟与普及。专用短程通信是一种无线技术,旨在通过V2V 和V2I 通信支持新的车辆安全应用[24]。据美国交通部估计,基于专用短程通信的V2V 通信可以解决美国高达82% 的涉及未受损驾驶员的车祸[25] 以及约40% 的十字路口车祸[26],表明这项技术在碰撞预防和道路安全领域具有重要意义。专用短程通信被视为在下一代智能交通系统中具有巨大潜力,其发展推动了车载自组网的研究和应用开发,该技术旨在帮助驾驶员更安全地出行并减少道路事故造成的死亡人数[27]。1999 年大会将5.9 GHz 频段的75 MHz 频谱专用于支持基于专用短程通信的ITS 应用,并且采用了基于IEEE Std.802.11p的DSRC 作为基础技术规则[28]。此后,随着各国纷纷出台专用短程通信标准化规范并给予政策支持,基于该技术的车载单元逐渐成为各种ITS 研究中的V2V、V2I 通信系统关键组件,向多功能、高集成度、高智能方向发展。例如,O. Hyunseo 等[29] 介绍了韩国电子通信研究院开发的5.8 GHz 的DSRC 分组通信系统,讨论了DSRC 通信系统的基本要求和系统设计规范,并指出车载通信单元必须具备小体积、低成本、高可靠性等特点。LIN Kang-Chiao 等[30] 提出了一种用于车载通信的WAVE/DSRC 系统,其中路侧单元和车载单元都是基于Linux 平台来实现,通过道路测试评估所实施的系统性能。A. M. Salman 等[31] 提出了一种基于DSRC 技术的分散式高速公路合并辅助系统,该辅助系统使用支持DSRC 的车载单元在车辆和Android 设备之间进行通信,以向驾驶员显示视觉信息。XU Zhigang 等[32] 在长安大学车辆与基础设施合作系统试验台上构建了由DSRC 和LTE 组成的独立专用无线网络平台,并利用车载终端、车载计算机和路侧单元(roadside unit,RSU)进行了基于专用短程通信技术的V2V、V2I 实验,验证了基于该技术的智能终端系统在多种复杂工况下的互联性能。
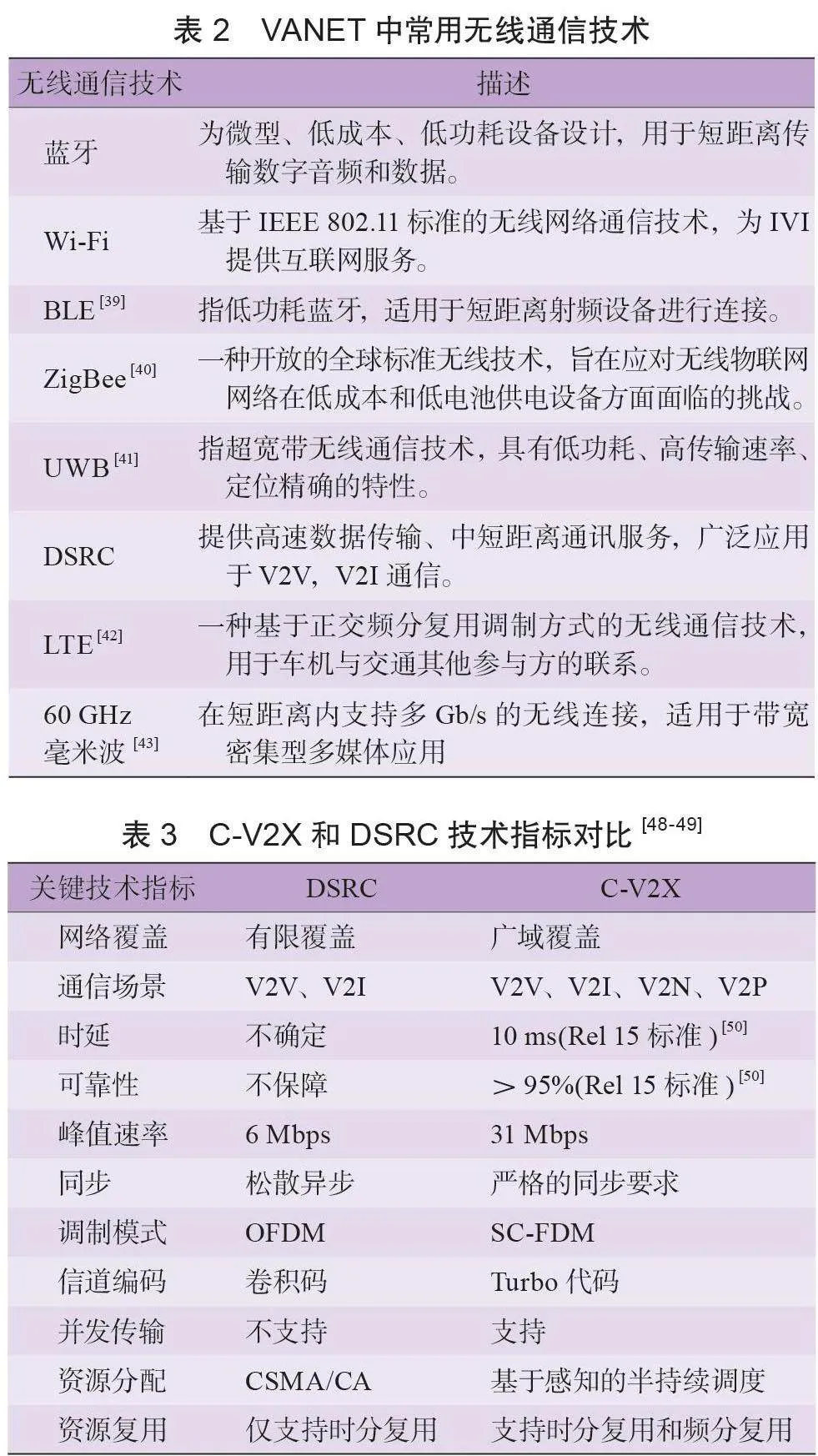
在目前的智能网联应用市场上,也有多种车载单元已经投入商用。例如,Arada LocoMate 车载单元是一种基于IEEE 802.11p 规范的提供V2V 无线通信的车载终端。该设备集成了用于车辆导航的GPS 设备,可以根据8 种不同的OFDM 调制类型,考虑不同的数据速率,为车间和车到路边单元提供低延迟连接[33]。其余的主流商用车载单元及其供应商如表1所示。除此之外,以下供应商还宣布提供用于商业部署的V2X 车载单元:法雷奥、博世、Danlaw、Ficosa/Panasonic、大陆集团、LG 电子、Commsignia、Genvict 和Nebula [34]。
1.3 智能网联赋能下的车载信息娱乐系统发展
传统的车载信息娱乐系统始终受制于单车平台带来的“ 信息孤岛” 问题,阻碍了车辆、乘员设备和外部环境之间的数据流动。车联网技术试图将智慧交通的每个要素连接起来,通过车辆、用户设备和道路基础设施互联互通,旨在应对围绕车载媒体场景的“ 信息孤岛” 困境[35]。随着新型无线通讯技术和智能网联技术的进步,智能网联汽车环境下车载信息娱乐系统的智能程度、集成度将会进一步提高,提供更强的信息处理服务或更全面的娱乐、社交选择。
基于车联网的车载信息娱乐系统最早可追溯至3G/4G技术时代。2002年,丰田推出了由KDDI CDMA2000支持的G-Book系统,用于提供城镇信息、娱乐、新闻、天气、交通信息等服务,该系统同时支持车载终端和移动设备访问[36]。2003年,梅赛德斯-奔驰联合多家合作供应商向全球展示了首款集成3G-UMTS服务的汽车,旨在演示基于3G的IVI系统提供高质量无线多媒体通信的能力,如导航、商业、娱乐以及实时交通状况[37]。上汽集团和中国联通在2010年发布的inkaNet系统满足了驾驶员通过访问互联网(如在线流媒体、有声读物、短信服务和导航等)进行社交的需求[35]。3G/4G时代车载信息娱乐系统的最大特点是实现了车载终端和移动设备的互联,通过移动设备的接入拓展了车载终端的应用场景与服务范围。随着基于LTE-V2X技术的车载信息娱乐系统出现,智能语音交互、高度集成的智能显示座舱、车辆与交通基础设施深度融合等概念也被提出,其功能和应用随着车联网的更高性能提升而不断丰富,“信息孤岛” 的困境逐渐得到解决。
相较于3G/4G 时代,5G-V2X 时代的智能网联汽车信息娱乐系统不仅为汽车制造商和服务提供商带来了新的机遇,也为交通场景中的潜在用户带来了新的机遇。驾驶员和乘客可以通过更流畅的互动享受大量实时、高质量的娱乐服务,如即时拥堵改变、车家互联、交互式全息显示、移动会议、远程医疗、公共监控等[38]。因此,未来基于5G 的智能网联汽车的车载信息娱乐系统可能将有以下发展方向。
1) 共享计算。尽管5G 时代的智能车载计算终端具有高集成度、高算力、高信息处理能力等优势,但受限于单车平台和不同设备供应商,保障自动驾驶高负荷计算、超高清流媒体渲染等高算力需求仍旧是一大难题。随着基于V2X 的车载单元和路侧单元的推广,车载信息娱乐系统或许可以通过与路边基础设施和周围车辆的通信辅助自身计算,利用车联网闲置资源提供更舒适的乘车体验。
2) 智能交互。现有智能人机交互功能主要体现为语音识别技术和集成中控大屏,随着车辆智能化程度加深,未来的车载信息娱乐系统可能将引入新兴识别技术和显示技术,例如基于手势识别、眼动识别等新兴识别技术的智能驾驶员监控系统,以及基于AR 技术的抬头显示乃至全息显示座舱[7]。
2 智能车载终端在5G环境下的应用
为了实现大规模和无处不在的汽车网络接入,智能网联技术不断发展并取得了长足的进步,基于先进的无线通信技术和新一代互联网技术的智能车载终端也被应用于各种新兴智能网联服务中,呈现全新的发展态势。
2.1 5G环境下的C-V2X技术
随着5G时代的到来,V2X技术也随之不断演进,以期支持更广泛的高级汽车应用,如自动驾驶汽车、远程和协同驾驶以及实时ITS 环境感知和控制[28]。目前,多种接入技术被用于车载自组网车载通信解决方案中。
第3代合作伙伴计划是负责蜂窝网络规范的标准化机构,致力于开发满足车载通信应用要求的技术[44],C-V2X 技术正是将蜂窝网络技术和车联网技术相结合的先进ITS 无线技术。传统的DSRC 技术虽然具有先发优势,已经运用在多个国家的V2X 应用中,但是相比C-V2X 具有诸多局限性:首先,其用于V2V 和V2I直接通信的协议算法CSMA-CD(carrier sense multipleaccess with collision detection) 存在隐藏节点、数据竞争和冲突问题[45] ;其次,其可见和不可见的传输距离非常有限[46]。相比之下,C-V2X 具有低延时[47] 和高可靠性的优点,可支持未来智能网联汽车的高带宽与大数据量需求,因此,C-V2X 技术标准在全球竞争中已形成超越态势。2种通信技术的技术指标对比如表3所示。
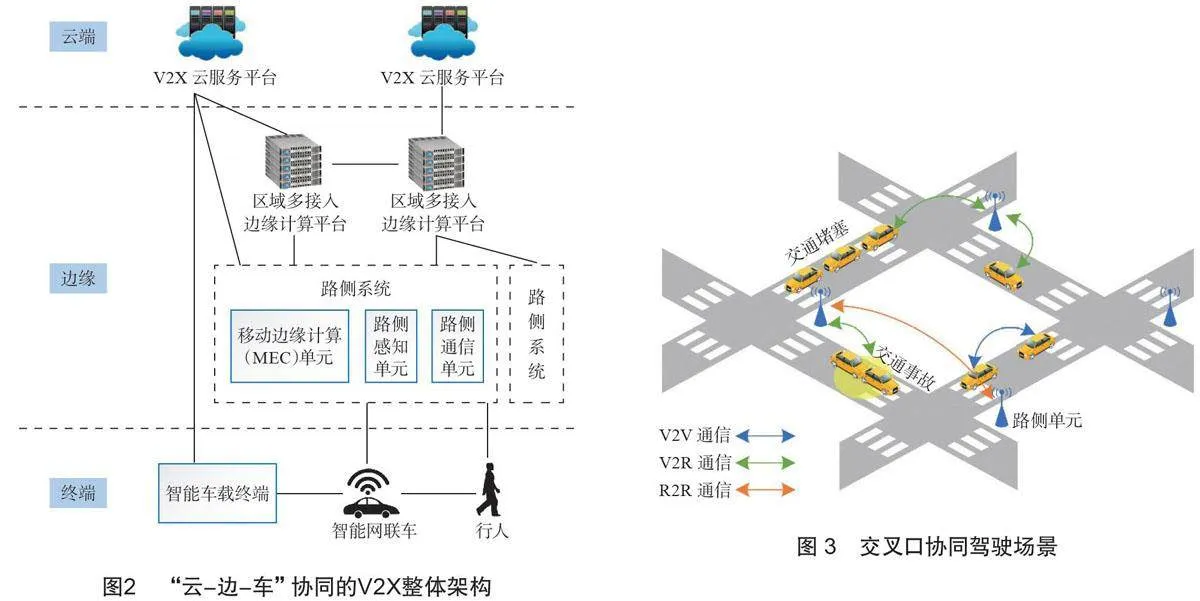
传统的车联网平台TSP与其他应用服务平台面向车辆的导航、娱乐、信息、安防、维护等服务,在进入5G时代后,已无法满足高并发、低时延的下一代智能网联服务的基本需求[51]。因此,基于C-V2X和5G的车联网技术融合传感技术、云计算和移动边缘计算(mobile edgecomputing,MEC),将构建 “人-车-路-云” 的高度协同互联环境,更好地支持车联网行业的高级驾驶辅助和自动驾驶。图2为基于5G的“云-边-车”协同的V2X整体架构。
1) 云层:云集成了各种服务器、应用、数据和丰富的资源。云的功能主要包括数据存储、资源分配、远程决策等,从而配合边缘层对网络进行管理[52]。
2) 边缘层:边缘层包括区间多接入边缘计算单元、具有感知与通信能力的路侧单元、路侧边缘计算单元等,负责为车辆提供靠近数据源的低延时服务[53],降低网络传输负载和云端计算压力。
3) 车辆层:车辆层的服务请求者主要是指具有感知、计算和传输能力的智能网联汽车,通过车载单元实现V2V、V2I、V2N (vehicle-to-network)、V2P(vehicle-to-pedestrian)等智能网联应用。
2.2 智能车载终端应用案例
2.2.1 协同驾驶
为了提高安全性和舒适性,智能网联汽车除了直接感知环境做出决策外,还通过车间通信和车路通信获取通信范围内其他车辆和道路的信息以进行分布式决策和控制,实现整个系统的协同控制。一个完全互联的智能交通系统将分享信息并协同控制,以共同优化交通流量并最大限度地提高安全性[54]。室内模拟实验数据表明,与以自我为中心的驾驶相比,基于V2X的协同驾驶理论上可以将交通效率提高42% [55]。在目前的协同驾驶领域,智能车载终端主要应用于交叉路口协同控制与优化、协作自动驾驶、协同防撞、协同感知等领域。
1) 交叉路口协同控制与优化。自动驾驶汽车与交叉口基础设施协同控制和优化被认为在改善交叉口性能上具有潜力[56]。LIU Bing 和E. K. Abdelkader [57] 提出一种基于V2X 的交叉路口附近车辆分布式协同自适应巡航控制算法CACC-VI,通过引入V2V/V2I 车载终端,重新组织交叉路口周围的车辆队列以提高交叉路口的吞吐量,并通过仿真结果证明其可行性。DONGChangqing 等[58] 提出基于Zigbee 的智能汽车基础设施协同驾驶系统,其中车载单元和路侧单元使用Zigbee无线技术交换信息,为驾驶员提供动态速度建议,从而最大限度地提高不停车通过信号灯交叉路口的概率。A. Shunsuke 和R. Ragunathan [59] 提出了一种用于自动驾驶汽车的协作动态交叉口协议,该协议使用车载感知系统和车载终端通信进行点对点协商,通过创建自组织、自我规划和自我优化的交通管理器来提高交叉口交通吞吐量和安全性。
2) 协作自动驾驶。MA Huisheng 等[60] 设计了一种面向协作自动驾驶的MEC 辅助5G-V2X 原型系统,并利用配备了车载终端的自动驾驶汽车和其余网络侧设备进行了5G-V2X 性能测试和协作驾驶功能测试。测试结果表明5G-V2X、MEC 与协作自动驾驶的结合具有优势。CAO Wanke 等[61] 提出了基于异质集成多网环路时延的协同自适应巡航(cooperative adaptive cruisecontrol,CACC),研究了由几辆配备了V2X 车载终端的车辆组成的CACC 排,并提出一种协作软件定义网络方案来处理环路时延。仿真结果证明所提出的控制方案在各种驾驶条件下表现出优异的车辆跟随性能。YANG Jianjun 等[62] 提出了一种基于Bézier 曲线的递归算法,该算法通过车载单元和路边单元之间的通信有效地为智能网联车辆创建路线,实验证明该算法创建的路线与真实道路具有高吻合度。
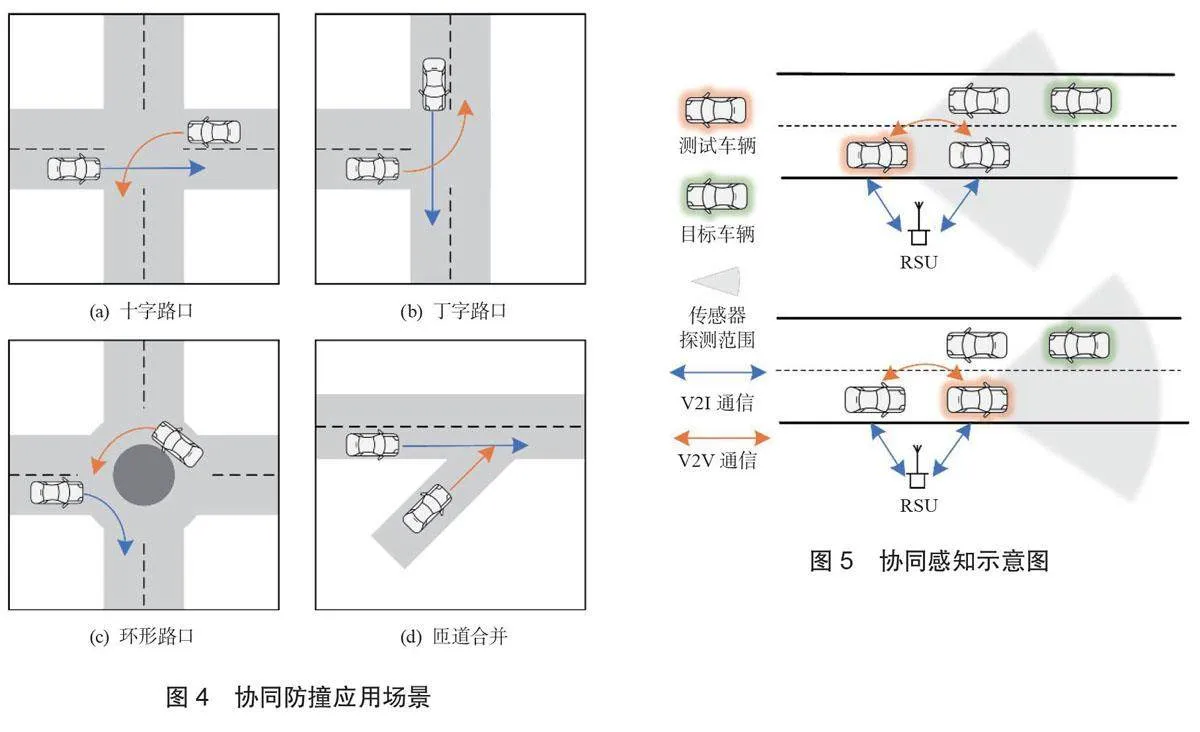
3) 协同防撞。各种交叉口场景在城市交通系统中发挥着重要作用,同时也带来了严重的安全问题,而基于V2X 的协同防撞与控制面向城市道路网中存在着一系列互动的场景,如图4 所示,旨在实现复杂环境下交通流量的安全高效运行。YANG Wei 等[63] 提出一种基于前方车辆驾驶意图识别和V2V 通信的前方碰撞预警系统,利用V2V 通信设备将前方车辆的驾驶意图和其他行驶参数传输到后续车辆实现碰撞预警,道路测试显示该系统大大减少了中低速范围内的追尾碰撞次数。YANG Tangtao 等[64] 提出了一种结合差分全球定位系统和DSRC 的前方碰撞预警系统,通过在车辆上安装DSRC 通信终端,系统通过V2V 通信将远程车辆的前方碰撞预警数据传输给主机车辆,并结合定位数据进行实时计算以判断碰撞风险。H. Shahab等[65] 提出了一种基于VANET 的概率方向感知协同避碰P-DACCA 方案,首次考虑了双向流量,在动态车辆集群节点配备OBU 与GPS 的前提下,使用纯临时VANET 架构解决集群内和集群间冲突的避免问题。
4) 协同感知。基于V2X 的协同感知同时利用路边感知设备和车载传感器,该集成将充分利用路边基础设施和智能网联车辆感知源,通过V2V与V2I 通信实现对道路交通环境的实时和高精度感知,以克服单车感知能力的局限性,如图5 所示。DUAN Xuting 等[66]提出了一种基于图像点云的协同感知方案,将路侧传感器检测到的激光点云地图通过V2I 链路反馈给车载终端,通过实验证明该方案能够提高交叉路口车辆的感知范围和精度。M. Radovan 等[67] 描述了一种在早期阶段利用V2X 技术的协作感知系统,测试了车载V2X终端和传感器的不同组合进行协同感知的效果,实验表明该方案在多种模拟道路环境下具有接近纯V2X方案的性能。ACFR 和Cohda Wireless 的联合研究团队关注协同感知为智能网联汽车(connected automatedvehicle,CAV) 运行带来的安全性和鲁棒性影响,通过车载终端和智能路边单元的V2I 通信,实现仅依赖路边单元的协同感知信息进行车与行人交互[68]。LIZongbian 等[69] 提出了一种毫米波V2X 网络架构,通过基于软件定义网络技术的车载单元与路侧单元进行V2I通信以实现高清动态地图接收和分发,并在实地测试中展示毫米波与软件定义网络技术在协同感知应用上的优越性。ZHANG Chi 等[70] 提出一种基于V2X 的自动驾驶遮挡感知规划方法,无须融合车载传感器和 V2X通信的感知数据,而是利用V2X 车载终端来计算和选择包含最佳检测结果的置信度修正,通过基于部分可观察Markov 决策过程的规划算法提供安全驾驶策略。M. Maruta 等[71] 提出一种基于毫米波V2X 的盲点可视化框架,通过将路侧单元向车载单元传输的原始传感器数据创建为彩色三维点云并投射至AR 眼镜上,向驾驶员提供盲点信息的逼真视图,并在室内和室外试验展示了其可行性。
需要注意的是,尽管V2X智能车载终端辅助下的智能车辆协同驾驶领域已经产生一系列突破,但现有车载终端有限的计算资源仍无法满足许多时延敏感消息的计算资源需求,应对车载终端不断扩大的计算需求将是未来面临的难题。同时,协同驾驶依赖于车载自组网,由于自发加入或离开的车辆节点,其频繁变化的拓扑结构、环境和临时性质方面是动态的,车载终端移动性和路侧单元有限的覆盖范围可能导致V2I 连接寿命短[72]。因此除即时计算能力外,还需考虑车载终端的长距离可用性、适当的安全机制、高度移动环境下的鲁棒性。
2.2.2 云计算与边缘计算
智能车载终端结合5G 网络、MEC、云服务,对云端和本地的交通异构数据进行实时综合分析,可以为车辆提供最优信息,通过多种无线网络覆盖为用户提供服务[51]。然而,对远程云的传统访问可能会因产生延迟而降低车载自组网服务质量[73],而去中心化的移动边缘计算和雾计算的出现,意味着数据处理和存储更靠近作为网络边缘的车辆,这被认为有助于解决远程云通信延迟和车联网计算资源有限的问题。
1) 边缘计算。G. A. Olmos等[74]提出了一种支持MEC的协作碰撞预防服务,接收车辆传输的符合ETSIITS-G5标准的消息以创建分布式动态地图并反馈给车辆,使用基于OpenC2X的车载单元实施并验证了该服务的运行。CUI Mingyue等[75]提出一种在三层车-边-云结构上卸载车辆计算服务的方法,包括离线调度策略和在线动态自适应调度算法,与仅使用车载单元相比,基于边缘计算的自动驾驶汽车定位拥有较低延迟和较高准确率。Y. Donghyun等[76]提出了一种基于边缘计算的具有细粒度访问控制的新型安全车载通信协议,利用高性能车载单元作为边缘计算结点,为低计算能力的ECU处理加密操作,并通过综合实验证明了该协议的可行性。HU Fangyu等[77]提出一种新型云边协同任务调度策略,使用多接入边缘云和远程云来分担车载单元的任务,利用改进的混合遗传算法最大限度地提高任务和计算单元之间的资源匹配程度。WANG Kan等[78]提出一种基于边缘计算的高可靠计算卸载策略,将车辆智能终端的实时业务直接卸载到MEC设备进行处理,利用深度强化学习实现卸载策略的优化。D. Anselme等[79]提出了一种基于处理的自动驾驶汽车卸载方法,设计了一个边缘云的协作空间,使用无监督机器学习、多无线电接入技术和开放无线接入网络中的边缘计算。仿真结果表明该方法将车载单元数据卸载速度提高了90.34%。KUYu-Jen 等[80]提出了一种基于车辆边缘计算的多车辆感知融合的不确定性感知任务卸载方法,基于实时信道条件、车载边缘计算和车载本地计算服务器以及感知结果,寻求最小化边缘协作多车辆感知融合应用的端到端延迟。
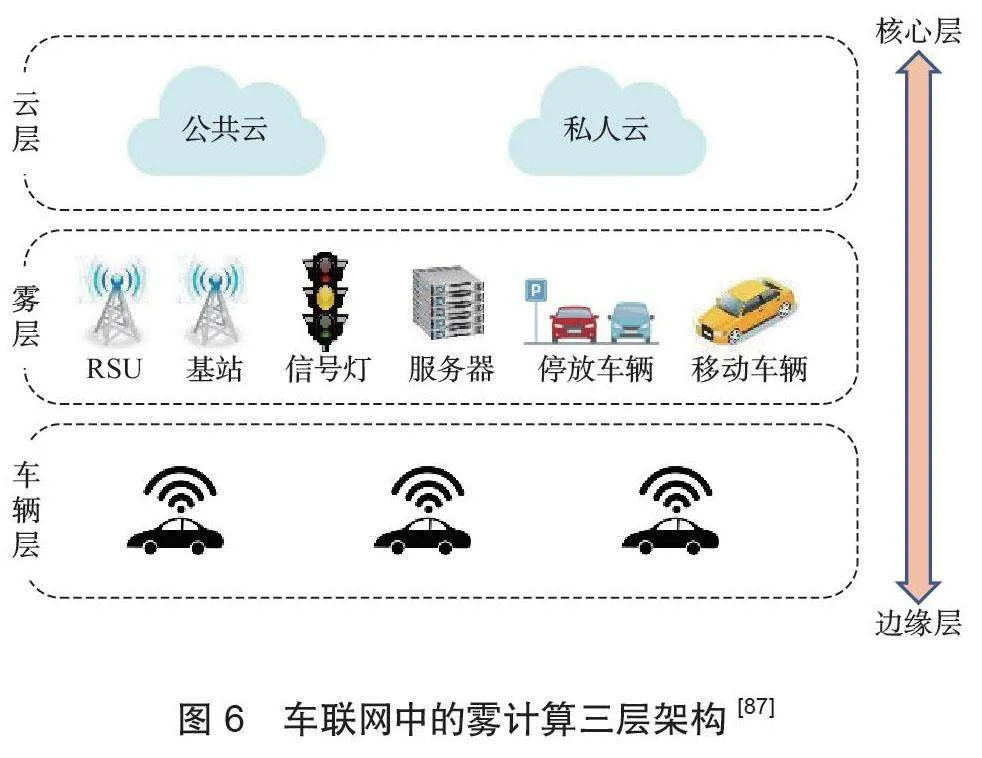
2) 车载雾计算。车载雾计算(vehicular fog computing,VFC) 利用车载资源来提升计算能力,通过促进近端车载终端的通信、计算和组网,从本地角度优化网络资源,具有灵活性和高效性[81]。此外,由于车联网雾计算三层架构中终端设备和雾节点之间的距离较短,雾计算降低了数据泄露的风险[82],如图6 所示。M. Sudip 和B. Samaresh [83] 提出了一种软件定义车载网络中的任务卸载方案,车载终端可以将任务卸载到选定的启用雾的路侧单元,同时考虑了车辆移动的影响以降低雾到终端的任务下载延迟。LIU Xuejiao 等[84] 提出了一种车载雾计算外包计算方案SE-VFC,源车辆利用车载终端与具有充足计算资源的雾车辆通信,实现源车辆计算外包和雾车辆批量匿名认证,仿真结果证实该方案的通信和计算开销相对较低。LI Yuwei 等[85] 提出一种车辆雾边计算范式,利用一种具有激励机制的多阶段Stackelberg 博弈来模拟雾边计算情景,以利用城市车辆车载终端的闲置资源进行计算卸载。WEI Zhiwei等[86] 提出一种VFC 中的多对多任务卸载框架,其中配备车载终端的车辆用作移动雾节点,通过引入基于Markov 决策过程的多智能体深度强化学习实现车辆之间有效且稳定的卸载和服务合作。
最新的研究建议将车辆计算任务卸载到边缘计算平台以辅助车载终端,但需要注意的是,要从同一位置和时间卸载的任务数量可能很大,车辆网络的动态、异构网络可用资源以及每辆车的不同服务质量(qualityof service,QoS) 要求使车辆网络管理问题难以解决[88]。因此,高效管理车联网基础设施并探索新的计算来源至关重要。
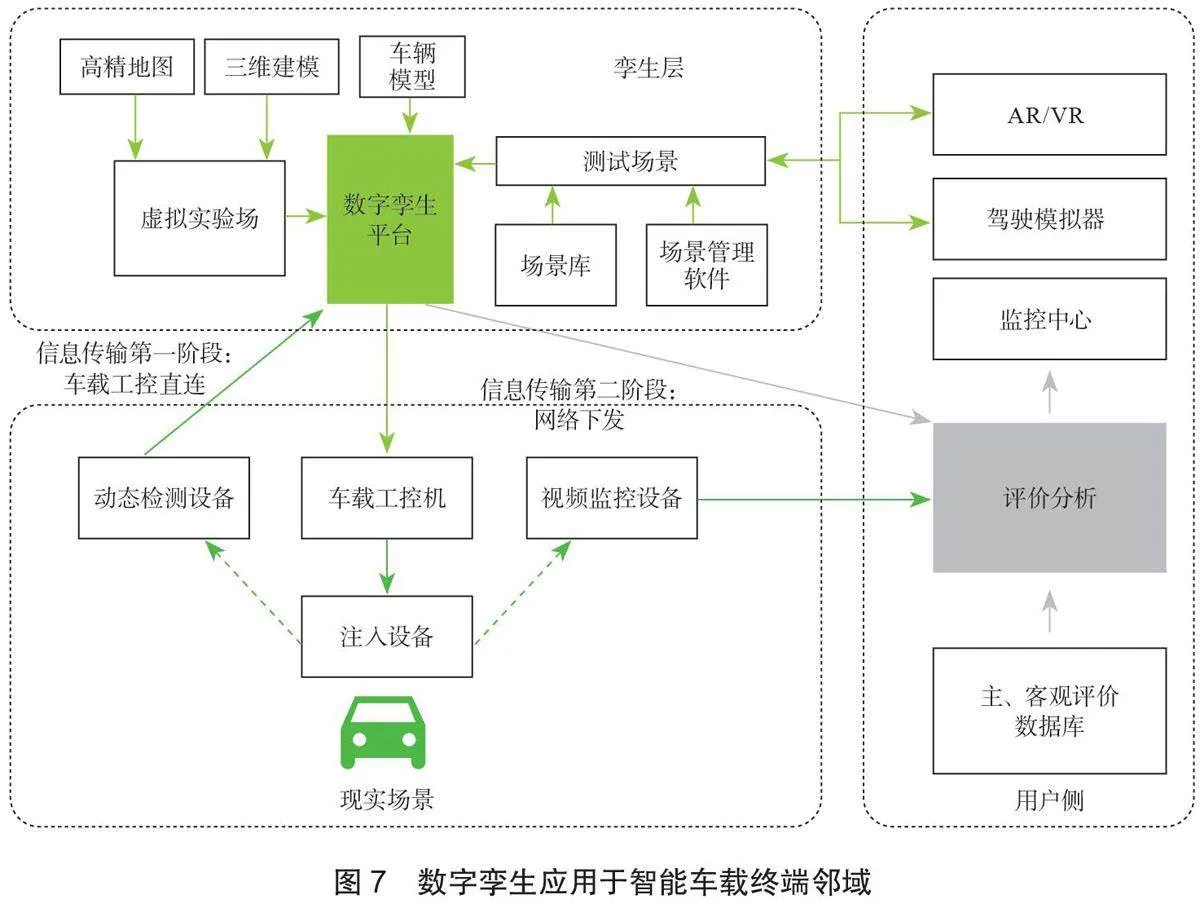
3) 数字孪生(digital twins,DT)。此概念由密歇根大学的 M. Grieves于2003年提出,这是一项基于历史数据、实时传感器数据和物理模型实时反映相应孪生体的状态的新兴技术,随着5G时代车云通信技术的发展,数字孪生也被引入智能网联车辆和智能交通系统中[89]。目前在数字孪生领域,智能车载终端主要用于车云通信和边缘计算,并最终在云端构建基于车端感知数据的数字孪生,辅助自动驾驶测试、数字地图、交通优化、决策规划、平行驾驶等应用,如图7 所示。LIAO Xishun 等[90] 提出一种基于车云通信的联网车辆协同匝道合并系统,车载终端通过4G/LTE 蜂窝网络将数据上传到云服务器,利用数字孪生得到匝道合并方案,现场测试显示该系统在安全性和环境可持续性方面具有优势。WANG Kui 等[91] 提出一种基于智能移动数字孪生的自动车辆导航系统,旨在利用实时交通数据创建数字孪生,为配备智能车载终端的CAV 规划路线。ZHAO Liang 等[92] 提出一种基于智能数字孪生的软件定义车载网络架构IDTSDVN,由智能车载终端收集实时车辆状态并传输至MEC 服务器以构建现实网络的数字孪生,使新生成的网络功能模型在应用之前能够进行预测性验证。HUi Yilong 等[93] 提出一种基于数字孪生的个性化车辆路径规划方案,CAV 通过车载终端向云端发送路径规划请求,云服务器利用基于流量数据和驾驶需求数字孪生的为CAV 确定最优驾驶路线。HUI Yilong等[94] 提出了一种异构车载网络中支持数字孪生的按需协作内容交付架构,用以简化配备车载单元的车载用户与路边单元之间的频繁交互,提高内容交付决策的效用。WANG Ziran 等[95] 提出了一种基于V2X 通信的数字孪生辅助协同驾驶系统,该系统利用数字孪生辅助的AR 人机接口为非自动驾驶的联网车辆的驾驶员提供视觉引导,从而降低车辆通过无信号交叉路口时发生碰撞的概率。WANG Kui 等[96] 构建了一个基于协同感知和云/ 边缘计算的数字孪生系统模型,通过在云端和边缘上分配不同的功能和服务实现实时交通监控和智能出行规划。
在可见的未来,以安全服务为典型的新兴数字孪生应用势必对V2X 通信的准确性、可靠性和低延迟提出更高的需求,而引入5G-V2X 的车云通信带来数字孪生技术飞跃的同时,也使智能车载终端进一步实现低功耗、高吞吐、高数据可靠性和超低时延等关键性能指标成为新的挑战。
3挑战与展望
在智能化网联化融合发展的当下,智能车载终端可以成为强大的车联网通信、计算结点,然而,要实现更高等级的智能网联自动驾驶仍然存在许多挑战。
1) 通信延迟和可靠性方面:与移动通信网络、物联网网络等不同,车载网络对无线通信的低延迟和高可靠性具有更高要求,这与人身安全紧密关联。例如,当车辆处于自动驾驶模式时,突然断开与云的连接可能会导致事故[28]。因此,需要优化智能车载终端的架构,提高其与不同通信技术的兼容性以及与不同通信设备的互操作性,以适应未来更加多样的智能网联应用,增强V2X 通信的安全性、有效性与可靠性。
2) 信息安全与隐私方面。当前车载终端的硬件设计理念和关联技术强调多功能性和稳定性,在实际应用时仍需面对安全问题的挑战[39]。尽管已有许多研究提出用于VANET 安全和隐私保护的方案以规避智能车载终端面临的安全风险,但由于车联网安全对人类的重要性和风险,有必要在这一领域进行更多的研究,可能的方向包括:安全的多网络融合( 即车载网络和外部网络) [97]、数据信任和验证、隐私保证、反恶意软件和入侵检测系统、安全架构的标准化。
3) 自动驾驶测试方面。目前,CAV 测试主要通过仿真、封闭测试设施和公共道路这3 条途径[98]。考虑到车载终端实际工况的复杂性,基于仿真和封闭现场的评价结果可能会偏离真实交通情况。因此,智能车载终端在成熟与投入商业市场之前必须搭载在智能网联汽车上并在真实的复杂道路上进行持续测试,以积累测试数据、改进技术。然而,在大多数开放道路( 尤其是高速公路) 上测试智能网联汽车的规范仍然缺乏。可以预见的是,未来需要测试场景分类、测试任务分类、完善测试体系、加快统一评价标准,进一步加强主客观研究一体化的综合评价体系。
4 结论
本文从智能车载终端在智能网联环境下的现状出发,介绍了智能车载终端系统架构并回顾了车载终端系统伴随智能网联技术发展的演进历程,分析了5G 时代下V2X 通信技术的革新对车载终端用途与定位的深刻影响,着重回顾了最新研究中智能车载终端在协同驾驶与控制、边缘计算与雾计算、数字孪生等领域的应用情况,最后展望智能车载终端在安全领域和自动驾驶测试领域的研究方向。经过几十年的发展,智能车载终端系统在各个方面都取得了长足的进步,拥有广阔的应用前景,同时仍面对着安全与隐私风险以及实际测试规范的缺乏等尚未完全解决的挑战,需要进一步研究与探索。
徐志刚 教授
长安大学信息工程学院副院长、二级教授、博士生导师,是国家级高层次人才,交通运输部中青年科技创新领军人才、陕西省杰出青年、陕西省青年科技奖和中国交通教育优秀教师奖获得者。主要从事智能交通系统分析、车联网与自动驾驶、车路协同等领域的研究,先后获得国家科技进步二等奖2项,陕西省科学技术一等奖3项、三等奖1项,研究成果在多个省市落地应用。目前兼任国际期刊Journal of" Intelligent and Connected Vehicles的副主编和Communications in TransportationResearch、Journal of Traffic and TransportationEngineering、《中国公路学报》《交通运输工程学报》等多个期刊的编委和世界交通运输大会车联网与自动驾驶委员会主席、美国土木工程师协会Tamp;DI委员,兼任“车联网”教育部-中国移动联合实验室副主任、交通运输部认定的长安大学自动驾驶测试基地副主任。