基于人工神经网络的风洞动态测压试验结果预测
2023-12-31刘苗鑫原正庭
刘苗鑫,雷 杰,原正庭
(中国飞行试验研究院,西安 710000)
机翼的动态失速是一种强烈的非线性、非定常空气动力效应,是一个振荡(或做其他非定常运动)过程中压力面在超过其临界迎角时绕流流场发生非定常分离和失速的现象[1],为了充分了解机翼的动态特性,需要进行风洞的动态测压试验,但由于动态测压试验中试验状态组合众多,包括迎角、侧滑角、舵偏角等等,无法对每一个试验状态进行吹风试验,并且由于试验结果数据与飞行器气动外形、试验工况(迎角、偏航角、舵偏角等)之间存在着复杂的非线性关系,无法通过已测工况的试验结果按照数学理论推导出未测工况的结果。
近年来,人工智能和机器学习的高速发展为风洞动态测压试验带来了新的发展方向。BP 人工神经网络,也称为反向传播网络,可以通过反向传播算法高效可靠地进行数据的训练及挖掘,其最大的特点是可以不涉及非线性函数的具体性质,只要有足够训练样本进行相关训练即可预测所需试验工况的相关数据。单潮龙等[2]研究了BP 人工神经网络的应用及其实现技术;通过利用BP 人工神经网络工具,曹为午等[3]实现了其在滑行艇阻力的估算;曹静等[4]实现了对基坑变形预测的应用;徐黎明等[5]实现了对泥石流平均流速的预测;许扬等[6]实现了对气热除冰温度影响因素研究;王彩玲等[7]实现了对水体生化需氧量的估算。
由此可见,BP 人工神经网络已经广泛应用于多种领域,因此基于BP 人工神经网络处理非线性数据的特点,本文将采用BP 神经网络对风洞机翼动态测压试验结果进行预测与估算。
1 试验模型与设备
1.1 试验模型
图1 是试验模型的示意图,图中A-A是传感器安装截面,与来流平行。
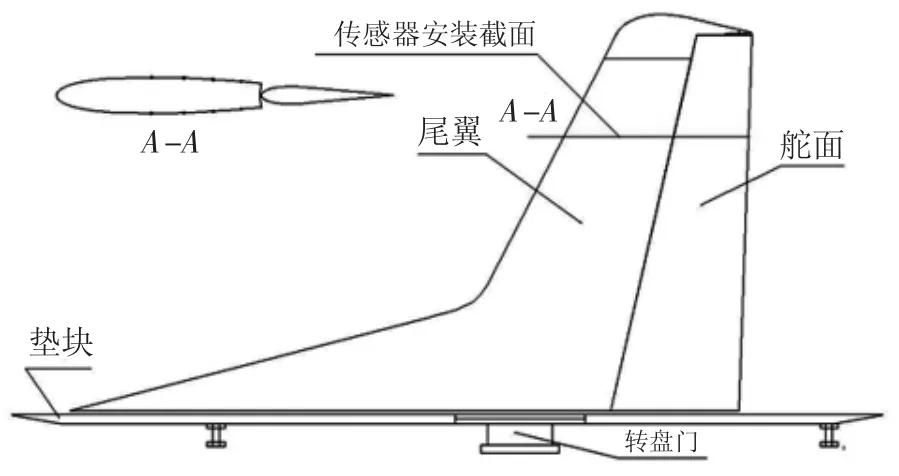
图1 试验模型的示意图
1.2 动态测压传感器
采用美国kulite 标准小型XCQ-093 动态压力传感器,直径2.4 mm,长度9.5 mm,量程2 psid 和5 psid,精度0.1%,固有频率150 kHz。
1.3 动态传感器安装位置
在模型的不同位置安装动态压传感器以测量此处的压力脉动值,传感器的安装截面及安装站位(1—8号传感器)如图2 所示。
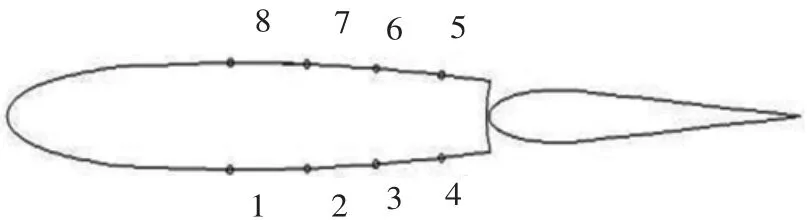
图2 传感器的安装情况示意图
1.4 数据采集系统
动态压力由Aglient VXI 并行数据采集系统完成。系统共48 个通道,16 位A/D,最高采样速率100 kHz。为满足试验要求,本次试验采样速率设定为5 000 Hz,滤波频率1 000 Hz,采样时长10 s[8]。
2 试验工况
试验在某低速风洞进行,来流风速50 m/s。模型状态:①迎角0°、3°、6°;②偏航角-20°、-16°、-12°、-8°、-4°、0°、4°、8°、12°、16°和20°;③舵偏角0°、5°、10°、15°、20°和-25°,因此总的组合状态为3×11×6=198 个。
3 BP 神经网络的建立与预测
3.1 BP 网络参数设置
3.1.1 确定相关函数
训练函数:trainlm。
传输函数:tansig。
仿真函数:sim。
归一化函数:premnmx,postmnmx。
3.1.2 确定BP 神经网络的结构
本文的BP 神经网络采用了2 层隐含层,其中2 个隐含层的节点均为10 个,输入层节点数为3 个,输出层节点数为2 个。
3.1.3 确定训练样本与测试样本
从198 个试验状态中选出180 个作为训练样本,其余18 个作为测试样本。
3.1.4 确定输入向量与输出向量
输入向量为180 组3 维向量[x,y,z],代表了180个训练样本,其中x 为迎角;y 为舵偏角;z 为侧滑角。输出向量为2 维向量[m,r],其中m 表示压力平均值,r表示压力标准差。
3.1.5 设定训练的参数
训练误差目标为10-7;系统学习参数为0.04;系统训练步长为500。训练的总误差平方△E的收敛曲线如图3所示[9-11]。
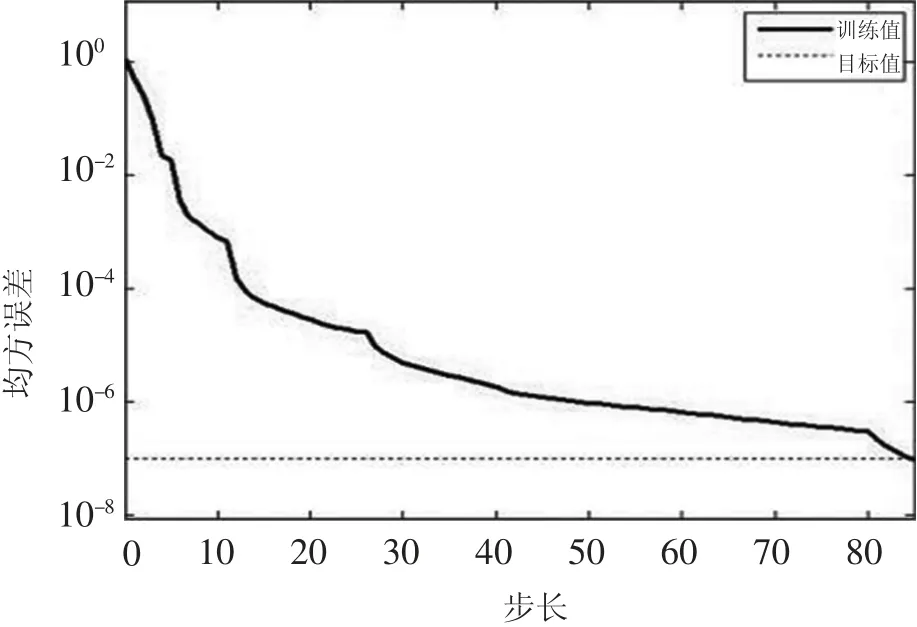
图3 总平均误差△E 的收敛曲线
3.2 BP 神经网络对动态压力值的预测
将BP 网络预测的18 组结果与原试验结果进行对比,图4 是压力标准差的对比结果,图5 是压力平均值的对比结果。
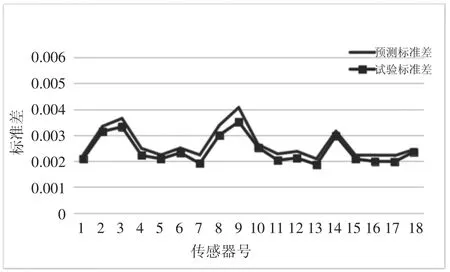
图4 压力标准差的预测结果与试验结果的比较
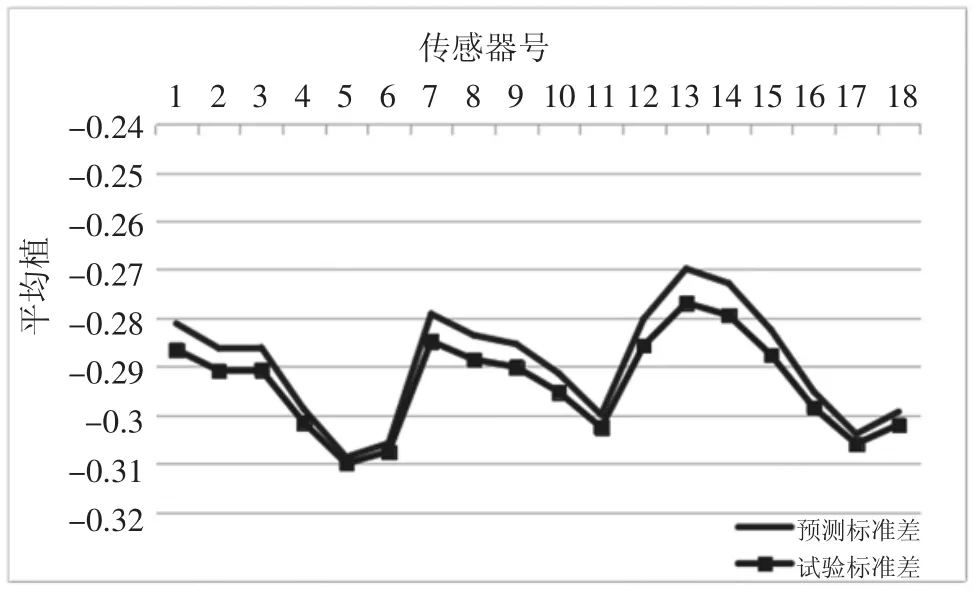
图5 压力平均值的预测结果与试验结果的比较
通过计算预测结果与试验结果的相对误差,均基本保持小于±5%。结果表明:BP 神经网络对压力值的预测结果误差较小,能够通过有限数据进行压力值的预测。
3.3 BP 神经网络对波动值的预测
波动度指在某个试验状态下,标准差除以平均值的百分比结果,即
以此来表示此处的气流分离程度,数值越大表明波动度越强,气流分离程度越大。选择试验工况为迎角0°,舵偏角0°,偏航角从-20°到20°,1—8 号传感器的波动度的试验结果,见表1。
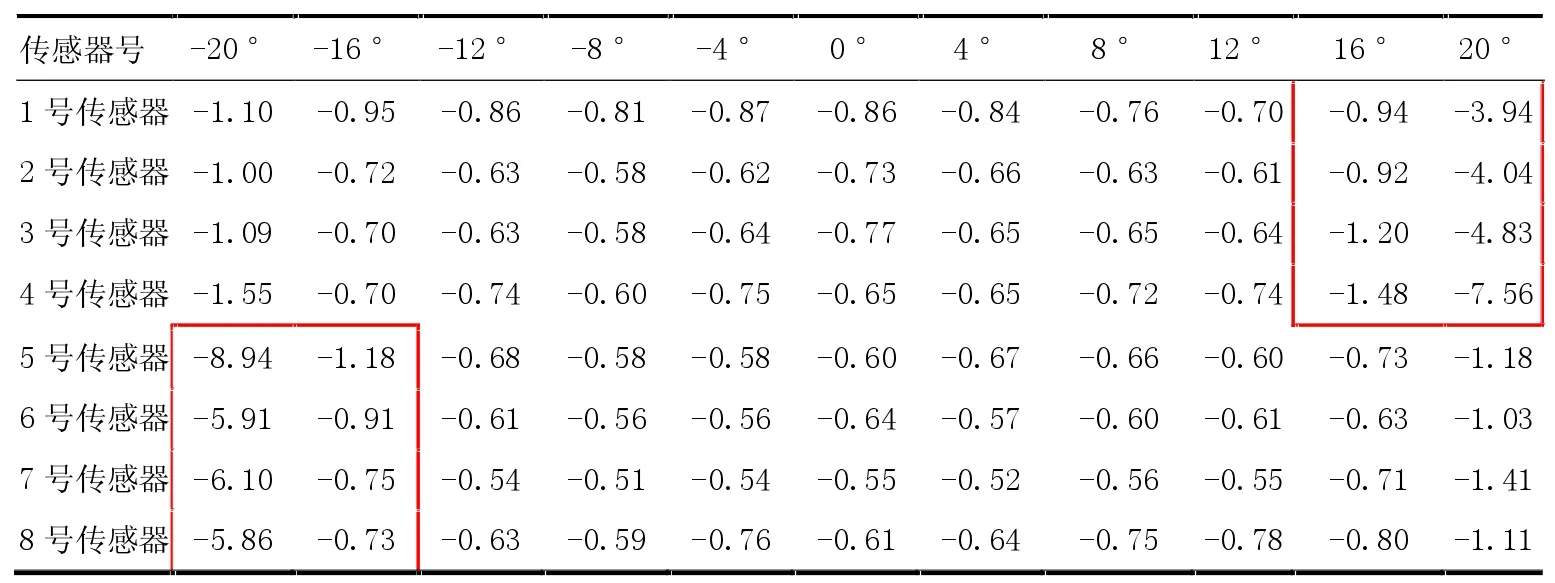
表1 传感器的波动度
其中,1—4 号传感器波动曲线如图6 所示,5—8号传感器波动曲线如图7 所示。
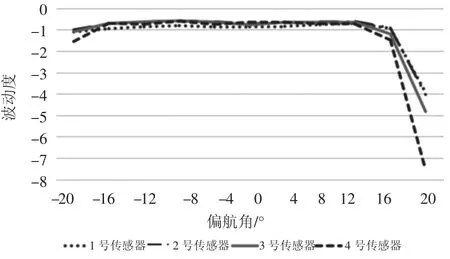
图6 1—4 号传感器的波动曲线图
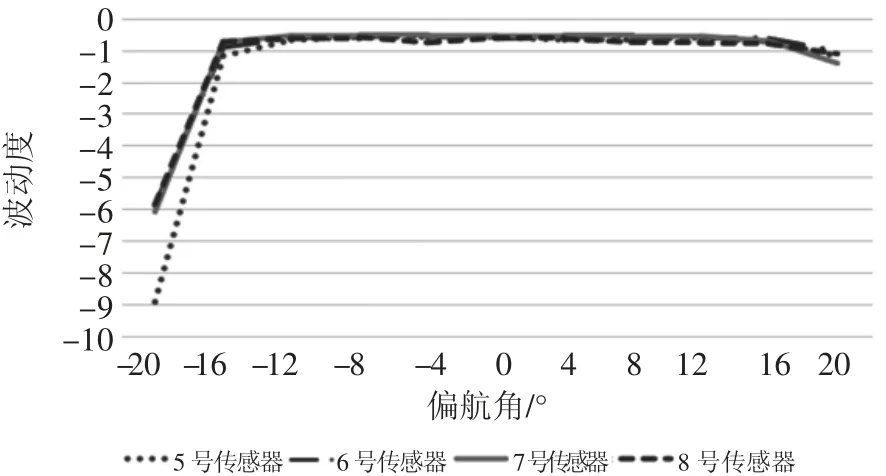
图7 5—8 号传感器的波动曲线图
由表1 的数据与图6、图7 给出的波动曲线图可以看出,1—4 号传感器在偏航16°到20°之间波动度发生突变,流动产生分离;5—8 号传感器在偏航-16°到-20°之间波动度发生突变,流动产生分离。但因为试验资源限制,导致偏航角间隔设置较大,无法准确确定分离发生在哪一角度,此处用BP 人工神经网络对分离区(即1—4 号传感器的16°到20°,5—8 号传感器的-16°到-20°)的情况进行预测。
同3.1 参数设置过程一样,先确定网络输出量与输入量及各个参数,其次进行人工神经网络训练,最后用训练好的网络预测分离区内每隔1°的波动值结果,预测的波动度结果见表2、表3,预测的波动值曲线如图8、图9 所示。
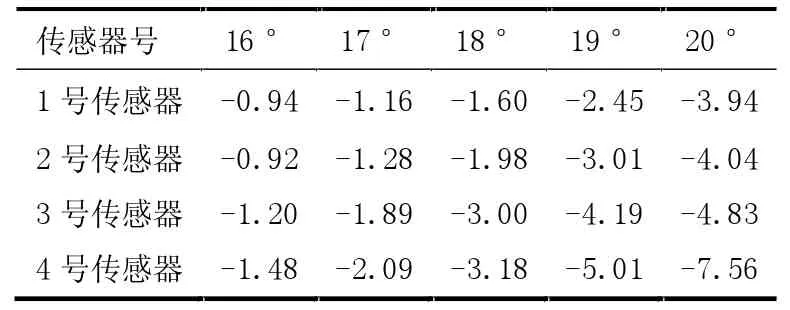
表2 1—4 号传感器的预测结果
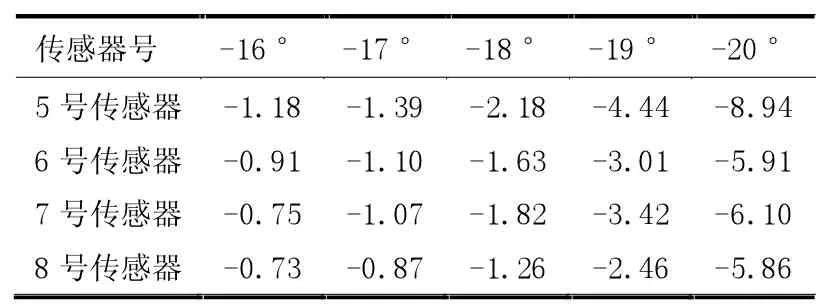
表3 5—8 号传感器的预测结果
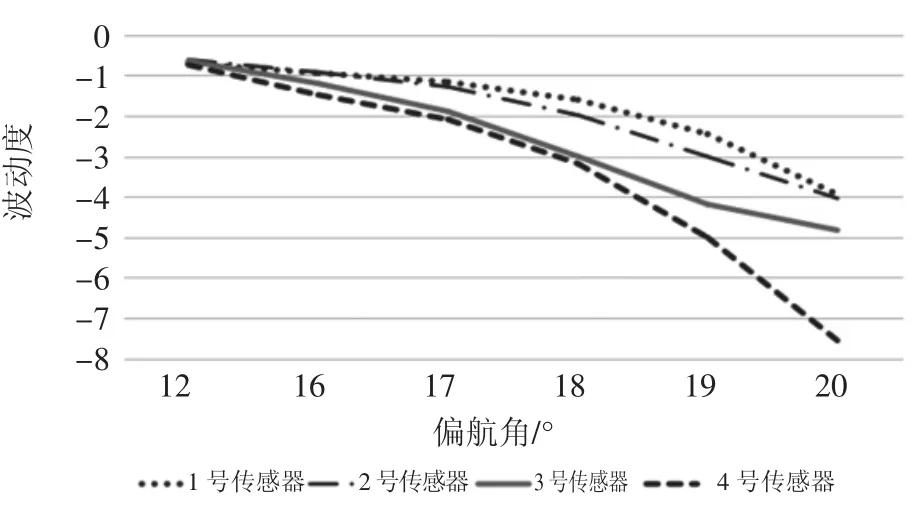
图8 1—4 号传感器预测波动曲线图
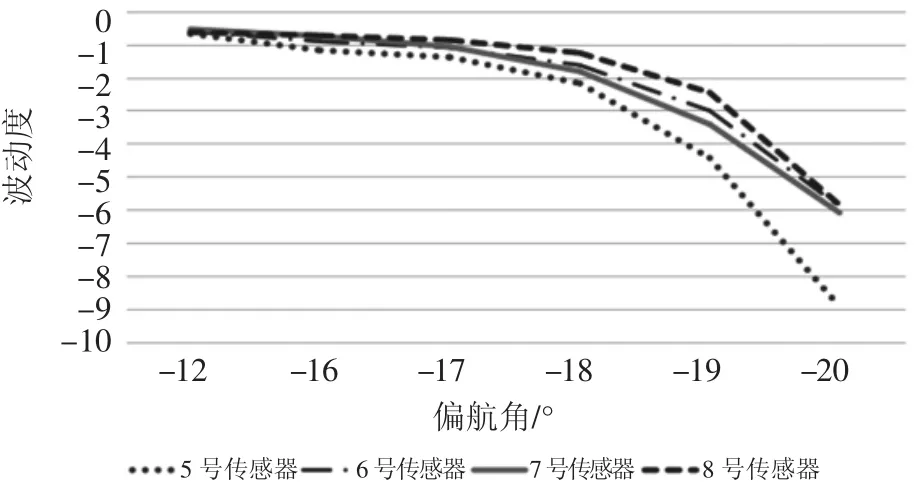
图9 5—8 号传感器预测波动曲线图
通过表2、表3 与图8、图9 中的预测波动值可以看出,1—4 号传感器在16°到17°波动曲线斜率增大,波动度变大,此处流动已经开始分离,同理,5—8 号传感器在-17°到-18°波动曲线斜率增大,波动度变大,此处流动已经开始分离。且在同一角度下,位置越靠前缘的传感器波动度越小,波动曲线斜率变化越小;对同一传感器,随着角度的增大,波动度逐渐增加,波动曲线斜率变化越大。上述预测结果与实际理论是相对吻合的,因此BP 神经网络在细化试验工况来预测气流分离的波动度上,能够提供相对准确的数据支持。
4 结论
通过本文研究,可以得到以下结论。
1)针对风洞试验动态测压数据的非线性,采用BP人工神经网络算法对180 组试验结果进行训练,并用18 组样本进行预测对比,将预测结果与实际结果进行对比发现,BP 神经网络可以有效地对动态测量的压力值及波动值进行预测,结果误差小。
2)在有限的试验数据下,BP 神经网络对大的分离流动的预测较为准确,通过预测分离区内的压力值及波动度,能够更加清楚地得到气流分离具体发生的角度,可以为得到机翼的动态性能参数并了解动态失速的特点提供全面、可靠的预测数据。
