基于FAHP/QFD/TRIZ 的智能医疗配送机器人创新设计研究
2023-12-31李明浩
李明浩,李 程
(绵阳城市学院,四川绵阳 621000)
随着5G 和物联网等技术的不断发展,智慧医疗成为医疗行业新趋势。2023 年发布的中国健康产业白皮书,着重指出前沿技术对行业的快速推动作用。目前世界处于后疫情时代,智慧医疗成为社会关注的焦点,为此完善智慧医疗成为必然趋势,智能配送机器人能解决当前背景下医疗配送服务功能[1]。面对当前的时代背景,智能配送机器人设计可为防控病毒传播贡献一份力量[2]。当前我国学者对配送机器人进行相关研究。其中任工昌等[3]采用ROS 方法对冷链配送机器人进行设计,实现了导航、避障功能设计。目前研究现状更偏向技术路线,对产品自身的创新设计较少且缺乏对用户使用体验研究,造成了当前的智能医疗配送机器人设计创意单一、用户体验不佳等问题。
综上,当前智能医疗配送机器人设计存在创新不足的问题,为了满足用户需求及提高用户使用体验,设计出最佳创新智能医疗配送机器人。可通过FAHP、QFD 与TRIZ 集成理论体系,构建设计流程[4-5]。
1 智能医疗配送机器人用户需求分析与重要度确定
模糊层次分析法简称FAHP,是一种将模糊一致矩阵引入层次分析中,通过建立模糊一致矩阵确定评价指标权重的方法[6]。FAHP 分析步骤分别是:①构建递阶层次结构;②构建模糊互补判断矩阵;③由模糊一致矩阵计算权重;④层次总权重排序[7]。
1.1 构建递阶层次结构
结合德尔菲分析法,进行问卷访问以及讨论,运用层次分析法对收集的数据、资料进行分析整理,建立出智能医疗配送机器人的AHP 模型,如图1 所示。
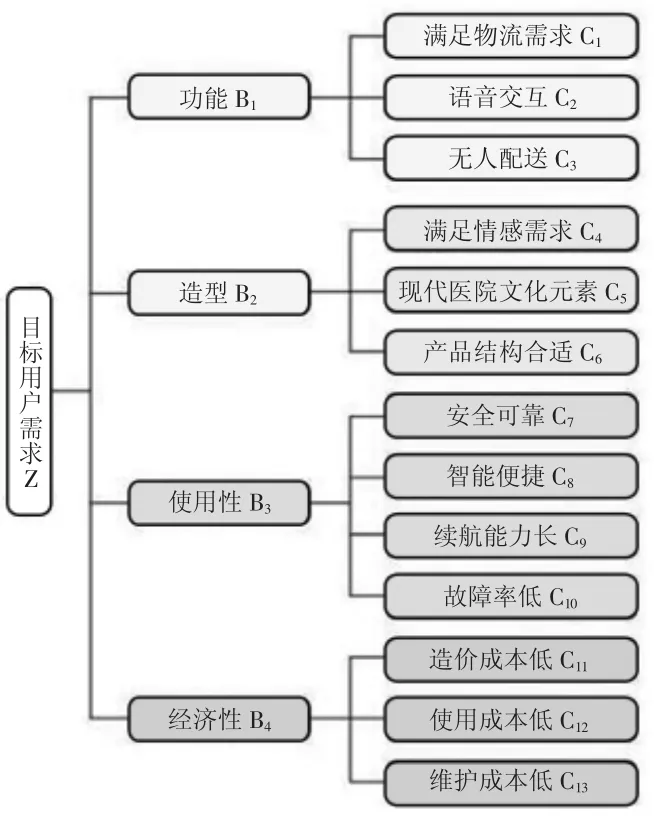
图1 用户需求层次模型
1.2 构建模糊互补判断矩阵
模糊互补判读矩阵是各指标层的两两比较,假定有a1,a2,...,an元素,建立关系矩阵
式中:rij为指标ai与指标aj相较于上一层指标的隶属度比较。
为了确定隶属度,根据Seaty 标度原则,设置1~9的模糊判断尺度。根据专家综合评分,由此可得出如下的模糊互补判断矩阵
1.3 模糊一致矩阵计算权重
在构造模糊判断矩阵时,需考虑其一致性,由于在实际决策中不能直接构造出具有一致性的判断矩阵,因此需要进行以下公式转换。
求矩阵R 进行乘积
进行公式变换
按列归一化求各指标权重值Wi
求综合权重
式中:几何平均值ωi计算
求判断矩阵的最大特征值λmax
对判断矩阵所得的权重进行一致性检验
式中:CI越接近0 值,表示一致性更大。CR值小于0.1时,该判断矩阵具有一致性。
为了解决模糊、难以量化的问题,使用加权平均模糊算子,将模糊评价矩阵与层次分析法得出的单排序权重进行合成运算,运算方式为单一元素的综合权重等于该元素所在层次权重乘以该元素指标层权重[8]。根据上列公式计算可得出单排序权重,综合权重以及一致性检验见表1。
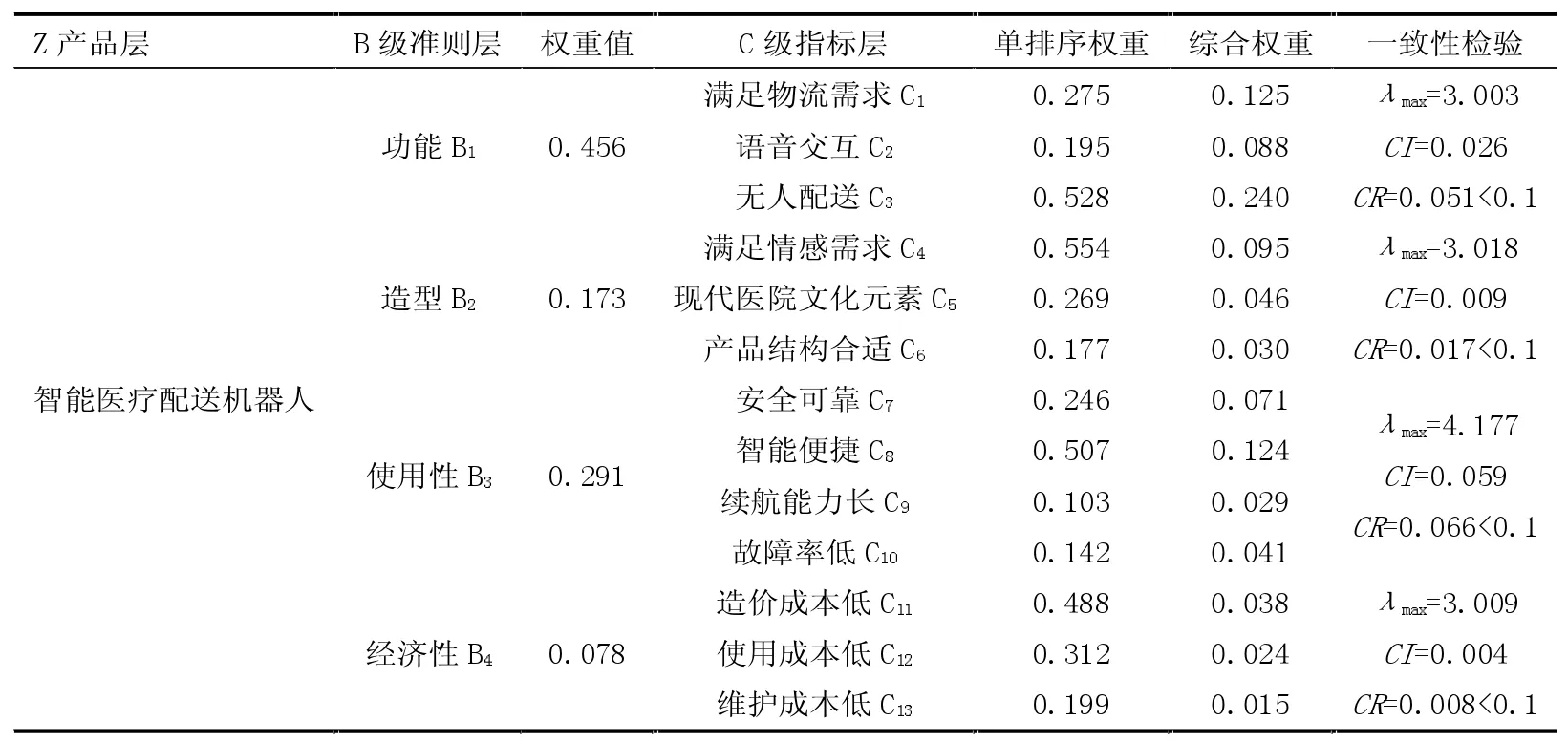
表1 单排序权重、综合权重、一致性检验汇总表
1.4 层次总权重排序
由表1 可看出在准则层评价指标权重最高的功能需求,其次是使用性、造型,最后是经济性。由于用户具有特殊性,所以对其在功能上需求较高,其次用户对医疗配送机器人较为陌生,所以在其使用上也存在需求。在指标层可看出在功能需求上,对无人配送、满足配送需求的需求度高,在造型需求上更偏向满足情感诉求,以及造型具有现代医院文化元素,在使用性需求上,对智能便捷与安全可靠有较高的需求,在经济性需求上,对于造价成本低有需求。语音交互、产品结构合适、续航能力长、故障率低、使用成本低、维护成本低需求较低。
2 智能医疗配送机器人设计要素分析
QFD(质量工程展开)是为了把用户或市场的需求转化为设计要求。HOQ(质量屋)是QFD 的核心部分,通过直观的框架演示产品开发中需求转换[9]。设计师在产品研发过程中通过HOQ 形式把用户需求分成设计要求、工艺要求、生产要求等,再进行分类归纳,将其转化为相对应的技术要求。QFD 能根据需求找出核心设计要素,提高了设计效率。
根据FAHP 所分析出的需求权重转化为设计要素重要度,分析出设计要素权重排序。求重要度权重
式中:Rij为质量屋关系数值;Wi为需求权重。
建立智能配送机器人质量屋。根据用户需求,设计师与行业专家对用户需求转化为设计要素,整理出15 个设计要素,根据对智能配送机器人的用户需求与设计要素进行相关性分析,构建智能医疗配送机器人的“用户需求-设计要素”质量屋,如图2 所示。在关系矩阵中,“5”表示两者间强相关,“3”表示两者间中相关,“1”表示两者间弱相关,空白表示两者间不相关。
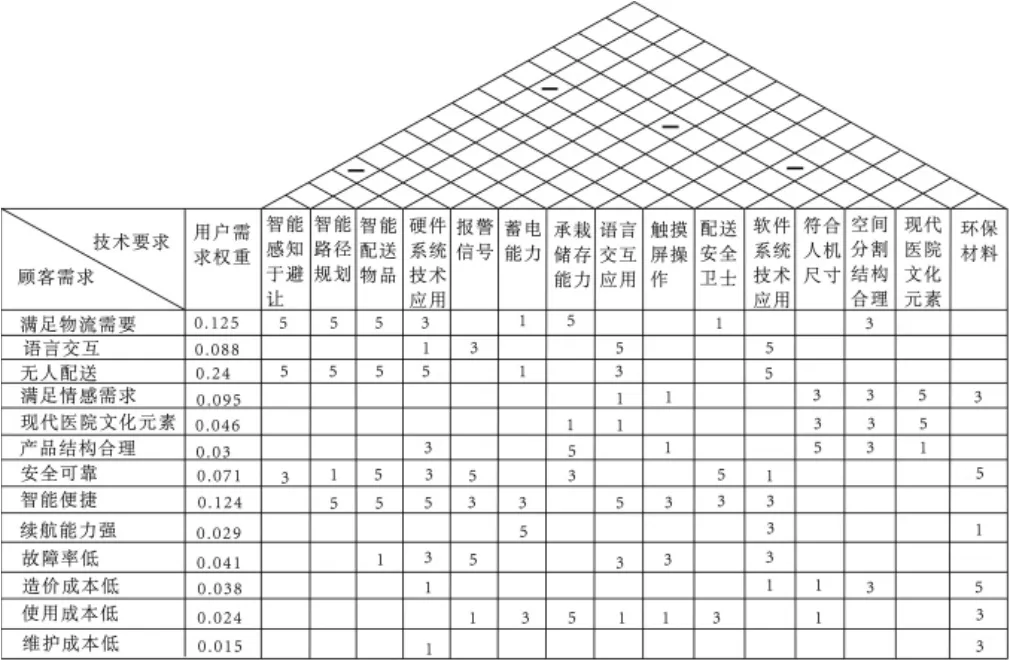
图2 智能医疗配送机器人质量屋
3 智能医疗配送机器人设计矛盾分析与解决策略
TRIZ 理论提供解决问题的方法,通过设计过程中遇到的冲突进行问题矩阵,利用原理工具找到与之相适应的解决方案,很大程度上可以找到设计的解决策略[10]。
3.1 智能医疗配送机器人设计矛盾分析
通过设计要素之间的相关性分析,确定设计系统中是否存在冲突,设计要素间存在的负相关情况,表明有技术或物理冲突。由图2 可知,智能医疗配送机器人主要存在1 对技术矛盾与2 对物理矛盾。根据TRIZ 理论,将冲突问题转化为TRIZ 相关问题见表2。
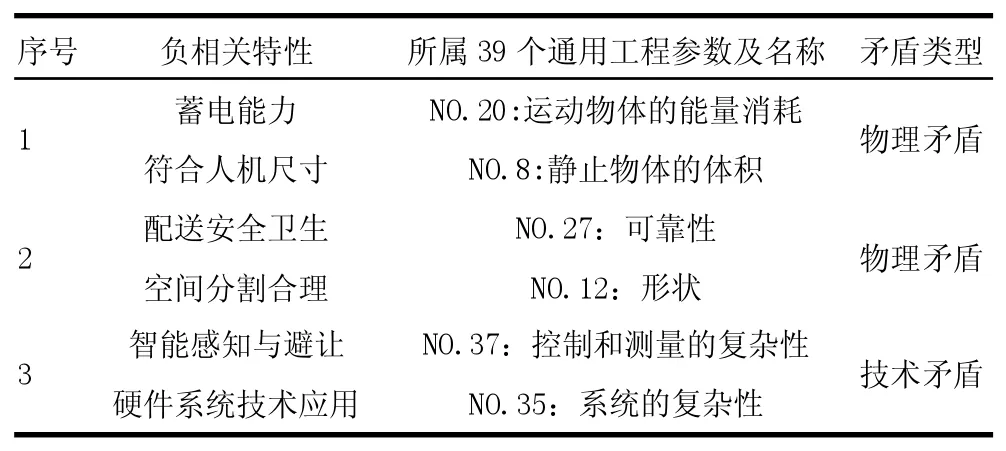
表2 冲突问题的TRIZ 问题转化
3.1.1 蓄电装置矛盾
蓄电池为配送机器人的整体运行提供电能,置于配送机器人机体,蓄电池容量大有利于提升续航能力,但是占用了配送舱的空间,反之,若减少蓄电池容量,增大配送舱体,会造成续航能力低,因此构成了物理矛盾。
3.1.2 配送舱矛盾
配送舱是配送过程中最重要的载体,机体大小决定配送效率,舱体卫生决定物品质量安全,由于配送物品的不一致性,对舱体的大小有不同的要求,物品的不同属性,对舱体空间有不同需求,故越要保证物品的安全卫生,则对空间分割要求越高,舱体设计难度增大,因此构成了物理矛盾。
3.1.3 配送技术矛盾
智能感知与避让是配送的重要支撑,目前导航过程中,落地环境较为复杂,对测量距离精度有更高的要求,系统复杂性就会增加,极大地增大了生产过程中的难度,因此构成了技术矛盾。
3.2 智能医疗配送机器人矛盾解决策略
通过TRIZ 的通用工程参数,得出智能医疗配送机器人创新设计中相对应需解决问题的TRIZ 理念发明原理。根据原理与智能医疗配送机器人相关知识、技术进行结合,获取可行性高的智能医疗配送机器人的创新设计方案。
3.2.1 蓄电装置设计
根据TRIZ 理论40 个创新原理得出3 号发明原理解决矛盾,原理与矛盾表述见表3。

表3 蓄电装置矛盾解决原理
根据3 号原理,将配送机器人机身分为装置蓄电池、配送舱2 部分。蓄电池装置放置于配送机器人后下端,与配送舱区域分开,为了增大配送量,前端配送舱设计较大,将蓄电池装置设计成智能充电模式,及时供给电量,增加蓄电能力。
3.2.2 配送舱设计
根据TRIZ 理论40 个创新原理得出1 号发明原理解决矛盾,原理与矛盾表述见表4。

表4 配送舱矛盾解决原理
根据1 号原理,将配送舱进行模块化设计,分为2种配送舱体模式,一种为配送用户医疗相关物品模式,另一种为配送餐食模式,根据2 种模式的物品大小进行舱隔大小设计。
3.2.3 配送技术设计
根据TRIZ 理论40 个创新原理得出23、24 号发明原理解决矛盾,原理与矛盾表述见表5。
根据24 号原理,升级传统识别系统,采用激光雷达传感器与双目视觉传感器并行的系统进行定位,内置位置追踪、障碍物传感器进行智能避让,避免单一系统对硬件的过度依赖,通过视差的方式实现距离的测量,并在系统中建立多维世界,运用自适应的算法,对动态实体进行准确的轨迹预测,避让行人、障碍物等。根据23 号原理,将传统四轮驱动替换成可旋转360°的万向轮,使配送机器人在感知到较小的空间,能够完成转弯操作,以便适应复杂的医院环境。
4 智能医疗配送机器人创新设计方案
根据TRIZ 理论矛盾解决策略进行创新性构思,对各方案进行优选,利用计算机辅助建模、渲染。设计过程中参考用户需求与设计重要度排序,对产品进行方案确定,方案效果图,如图3 所示。产品的主要创新点包括以下内容。

图3 智能医疗配送机器人方案图
功能区域设计,分为3 个部分,包括底座、机体、顶部。底部主要装置万向轮、平衡感应器、激光雷达、避障传感器和双目视觉摄像头等硬件系统,机体有配送舱与蓄电池箱2 部分,顶部装置触摸屏、ID 卡识别区、语言交互区等。触摸屏操作与配送舱属于用户常用功能区域,设定高度较高,避免用户经常深蹲、弯腰等动作。
配送舱体模块化设计,2 种配送模式,在餐食配送上,由于餐食分量大小大致相同,所以采用相同大小的配送舱隔,这种模式不仅可以增加配送量,也能增强保温功能。在配送医疗物品上,由于物品包含药品、衣物、医疗器械等,尺寸大小不一,所以采用不同尺寸的配送舱隔,这种模式不仅能配送不同物品,也能保证物品的安全卫生。
无人配送设计,采用激光雷达传感器与双目视觉摄像头并行系统进行定位识别;避障传感器进行避障;高平衡传感器保障配送过程平稳运行;人工智能方法与预先设定路径方法结合进行路径规划;ID 卡识别区保证用户存、取物品安全,避免错拿、误拿等行为;自动回充系统检测电量不足时,能自主找到预先设定好的电源进行快速充电,保证续航能力;报警系统,在发生自身故障时,实时发出报警信号。语音交互,提醒用户在使用前、使用中、使用后事项,减少用户操作失误。
造型外观设计,采用仿生设计,根据服务人员的外形进行抽象设计,让用户体验到被服务的感觉;采用对称设计,视觉具有稳定性,符合当前医院形象。
5 结论
FAHP、QFD 与TRIZ 的集成设计模式在智能医疗配送机器人创新设计上具有可行性与有效性。该集成模式首先通过FAHP 确定QFD 的用户需求权重值,将用户感性思维通过系统化、数字化的形式体现出来,提高了QFD 中确定用户需求等级时的准确性。其次通过QFD 将用户需求转化为技术要求,确定设计重要度排序及发现设计要素之间的矛盾。最后应用TRIZ 理论寻找解决策略,设计出功能划分区域合理、配送舱安全卫生、具有无人配送功能及造型符合视觉体验的医疗配送机器人。这种集成设计模式能够在一定程度上弥补设计理论单一现状,可为相关配送机器人创新设计提供参考。
