测雨雷达基本原理及在降水估测中的实践
2023-12-30李道彬
李道彬,胥 金,田 楠
(1.四川省水文水资源勘测中心,成都 610036;2.四川省广元水文水资源勘测中心,四川 广元 628000)
PRS-11/M型X波段双偏振多普勒测雨雷达可解决中小河流洪水高发区域的应急监测问题。本文主要针对四川省水文中心已建设的X波段PRS-11/M系统在降水估测率定方面的实践,通过近年的降水观测试验,进行提升降水估测精度方法的研究,包括雷达数据质量控制、雨衰订正、辅助观测设备的率定、降水估测方法的研究。
1 PRS-11/M系统介绍
PRS-11/M型X波段双偏振多普勒测雨雷达(以下简称PRS-11/M系统)是一种用于地球科学领域的大气探测仪器,主要用于观测台风及强对流性天气系统的对流结构,在降水估测方面应用广泛。具体技术参数如表1所示。
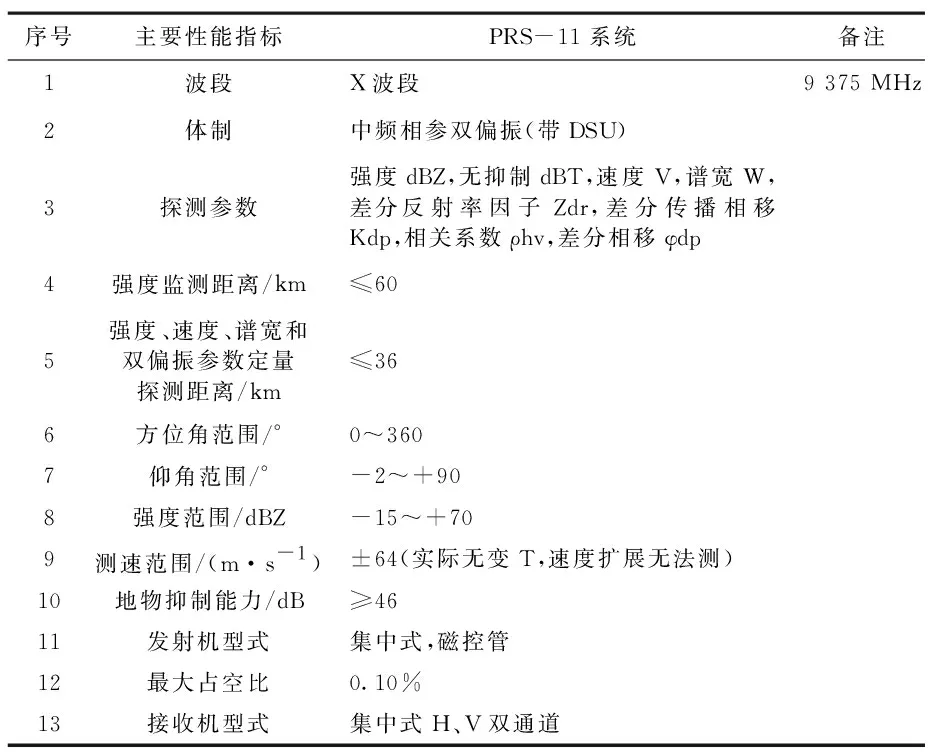
表1 PRS-11/M系统主要技术指标
2 降水估测应用研究
PRS-11/M系统于成都市双流区黄龙溪水文站开展了为期两年的观测应用试验,主要针对雷达探测模式、数据质控与率定方法、降水估测方法等开展了相关应用研究。
2.1 PRS-11/M系统探测原理
PRS-11/M系统的探测原理是将实时采集并完成质量控制后的雷达回波数据与雨滴谱仪数据进行融合,采用多种降水估测数学物理模型,完成5 min雨量的生成,覆盖以雷达为中心,半径60 km的范围。探测原理流程如图1所示。

图1 PRS-11/M系统探测原理流程
其中,雨滴谱仪数据作为系统的重要支撑,在雨衰订正、Z-R关系拟合、降水高度计算等模型运算中对参数影响很大。但降水区域覆盖的雨滴谱仪个数过少甚至无覆盖时,模型运算的参数会采用上一时次参数或默认参数,将产生一定的误差,影响最终雨量的探测精度。
本文研究的主要内容是验证多普勒雷达测雨系统观测数据的可靠性,其比测对象为传统的雨量计(自动翻斗雨量计或人工雨量计)。比测方法为多普勒雷达测雨系统与其观测范围内各处雨量计观测数据进行对比并计算其偏差值,最后,计算雷达与整个范围内雨量计偏差的均值。
按图1所示,率定的主要内容涉及到从PRS-11/M系统原始数据的生成,到5 min面雨量产品的生成,主要包括以下几个方面的内容:①PRS-11/M系统原始数据的率定;②雨滴谱仪数据的率定;③各雨量场反演方法参数的率定。
2.2 PRS-11/M系统原始数据的率定
从雷达原理出发,原始数据的率定主要包括以下3个部分,雷达探测性能参数的率定、雨衰订正的率定和数据质量控制的研究,以及雨滴谱仪数据的率定。
2.2.1 雷达探测性能参数的率定
作为雨量分布反演的主要输入,雷达原始数据的准确性和精度将直接影响雨量分布反演的准确性[1]。为了更好地保证雷达原始数据的准确性和精度,必须对雷达探测性能参数(包括灵敏度、动态范围、探测距离、强度定标、天线到位精度等)进行严格率定。
2.2.2 雨衰订正的率定
从雷达气象学理论分析,大气中的气体分子、云滴、雨滴、冰雹及干雪等均会造成雷达电磁波的衰减。一般用衰减系数来描述目标物对电磁波衰减的强弱,其定义是:雷达波功率在目标物中传播单位距离后,由于目标物的衰减作用,所减少掉的分贝数,即:
k=-10lgpr/pro
式中,pro为无衰减时雷达波传播单位距离的功率;pr为有衰减时雷达波传播单位距离的功率;k为衰减系数,单位为dB/km。
雷达波长越短,受雨衰影响越严重。PRS-11/M双偏振多普勒测雨雷达系统采用X波段体制(波长3 cm),雨衰订正是X波段雷达应用中比较重要的一个问题。
2.2.3 数据质量控制
在利用PRS-11/M系统的参数进行降水估测时,雷达数据本身的质量对其影响较大,因此在进行降水估测前,需对雷达数据进行质量控制。本系统目前采用的质量控制方法包括:滑动平均方法、中值滤波方法、FIR滤波方法[2]。本文重点针对FIR滤波方法进行分析。
设有限冲激响应FIR滤波器的单位冲激响应为h(k),那么一个长度为M的FIR滤波器的系统函数为:
(1)
它是次数为M-1的z-1的一个多项式。一个输入信号x(n-k),通过FIR滤波器输出信号y(n),可以表示为:
(2)
式中,k为雷达径向距离库序数;M为FIR滤波窗口的大小[3]。
从图2分析可以得出,FIR滤波能对红圈所示的降水强中心进行较好地还原,同时,对于回波边缘因脉冲积累不足造成的离散点进行有效抑制。
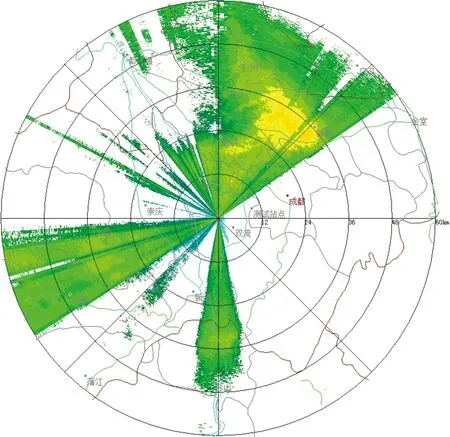
(a)滤波前
2.3 雨滴谱仪数据的率定
PRS-11/M系统除了测雨雷达外,还包括7部激光雨滴谱仪,分布于雷达周围,半径60 km以内。雨滴谱仪作为测雨雷达系统的一个辅助探测系统,用于衰减订正参数的拟合以及Z-R关系参数的确定。激光雨滴谱仪在整个系统中起到“标校源”的作用。
2.4 各雨量场反演方法参数的率定
2.4.1 单偏振Z-R关系法
常规雷达的降雨估测公式:
R1(Zh)=a×10b×Zh
(3)
式中,Zh为水平偏振反射率,单位为mm6/m3。
当降水强度较小时,利用Z-R关系法估测降水可以达到较好的精度,根据相关资料,在对流性降水过程中,系数a、b经验值可取a=300、b=1.4,在层状云降水过程中,系数a、b经验值可取a=200、b=1.6。PRS-11/M系统因为引入激光雨滴谱仪作为辅助探测设备,a、b取值可以采用激光雨滴谱仪动态拟合完成,通过试验,采用连续15 min的雨滴谱数据进行最小二乘法拟合,可以有效提升a、b估值的准确率,从一定程度上提升降水测量精度。
2.4.2 双偏振参数反演
本文采用的是KPP-ZDR-R关系法。对于降水强度很大的情况,ZH和ZDR可能会受到冰雹的干扰,而KDP不受绝对定标误差和衰减的影响,即使在雨中混有球形冰雹时,其估值依然准确,所以选择R4公式形式:
(4)
式中,ZDR为差分反射率因子,是反映以反射率因子为权重的降水粒子的平均轴比的物理量;KDP为差分相移变率,为水平、垂直偏振波在降水区的传播常数增量差;通过前期研究表明,系数a、b、c可取a=7.049、b=0.9411、c=-0.456。
3 实测降水过程分析
对PRS-11/M系统2017-2019年降水资料进行分析(主要资料为2017-2018年),重点按降水过程进行评估。
3.1 2017年4月15日降水过程
雷达探测范围内降水过程时间为:2017年4月15日23∶00 ~ 2017年4月16日13∶00,地点:黄龙溪水文站。该过程为混合型降水过程,包括:层状云降水和对流云降水,部分雨量站点12 h雨量超过20 mm。该过程雨量雷达累积雨量相对于雨量站雨量整体一致性较好,两者相关性较好(见图3和表2)。
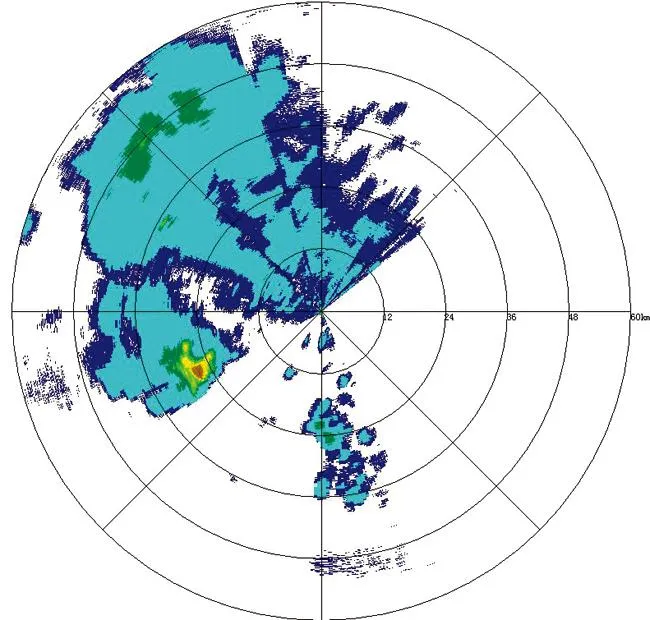
图3 2017年4月15日23∶10开始连续时刻雨量场分布

表2 评估结果
2017年4月15日23∶00~2017年4月16日13∶00累积雨量对比如图4所示。
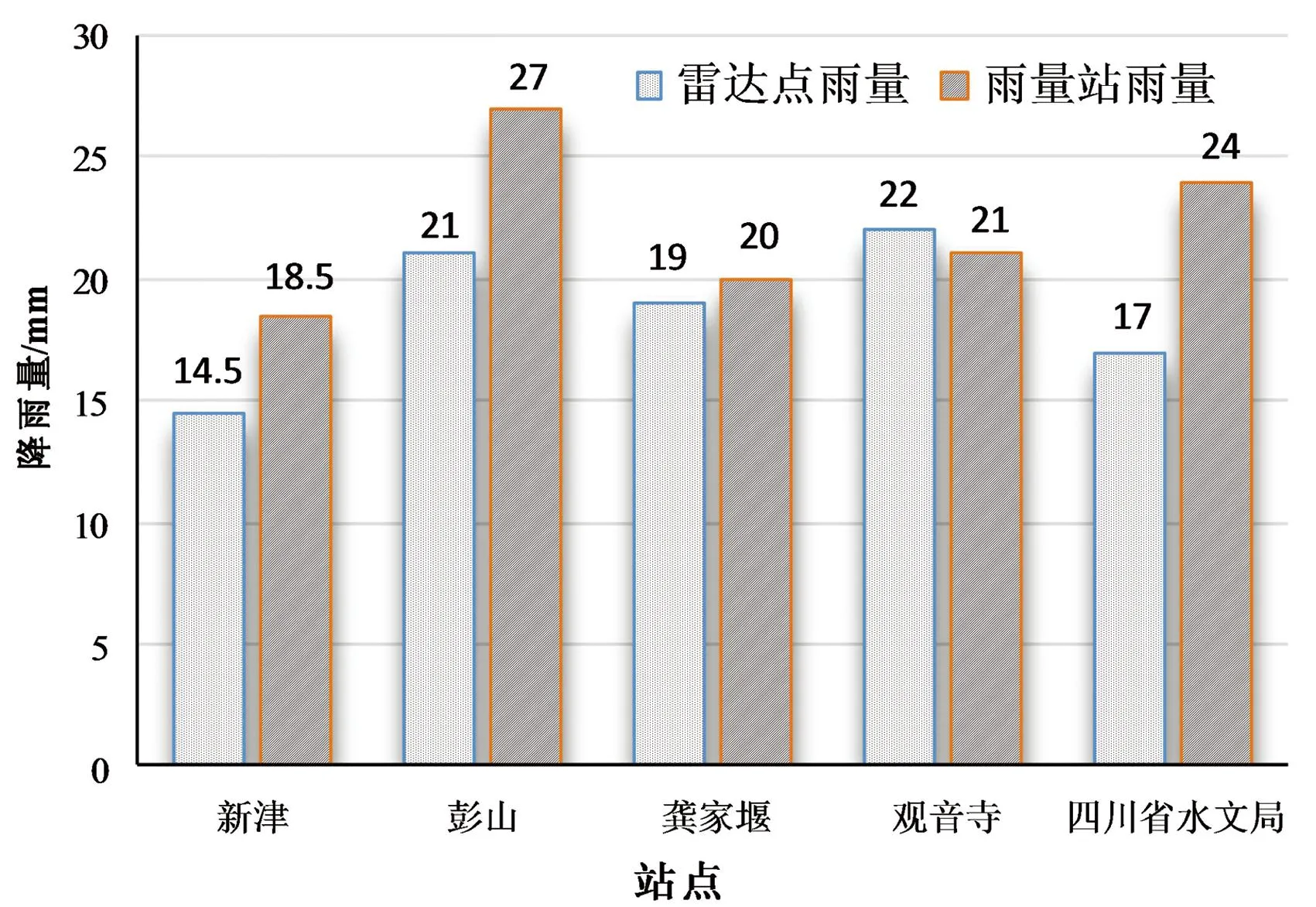
图4 雷达累积雨量与雨量站雨量对比
3.2 2018年6月13日降水过程
雷达探测范围内降水过程时间为:2018年06月13日03∶00-2018年06月13日23∶00,地点:黄龙溪水文站。该过程为混合云降水过程,均匀降水过程中伴有局地强中心,持续时间长,超过12h,部分雨量站点雨量超过30 mm。该过程雨量雷达累积雨量相对于雨量站雨量整体偏小,两者相关性较好,相对误差较小(见图5和表3)。
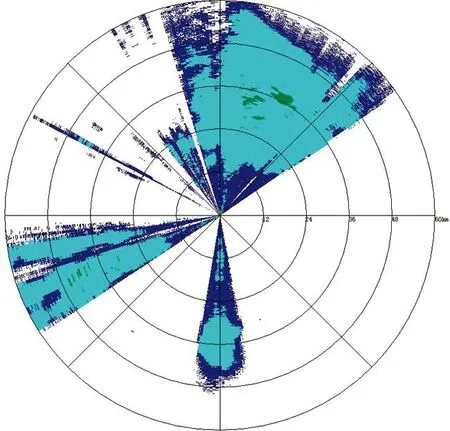
图5 2018年06月13日03∶00分开始连续雨量场分布

表3 评估结果
2018年06月13日03∶00-2015年06月13日23∶00时段累积雨量对比如图6所示。
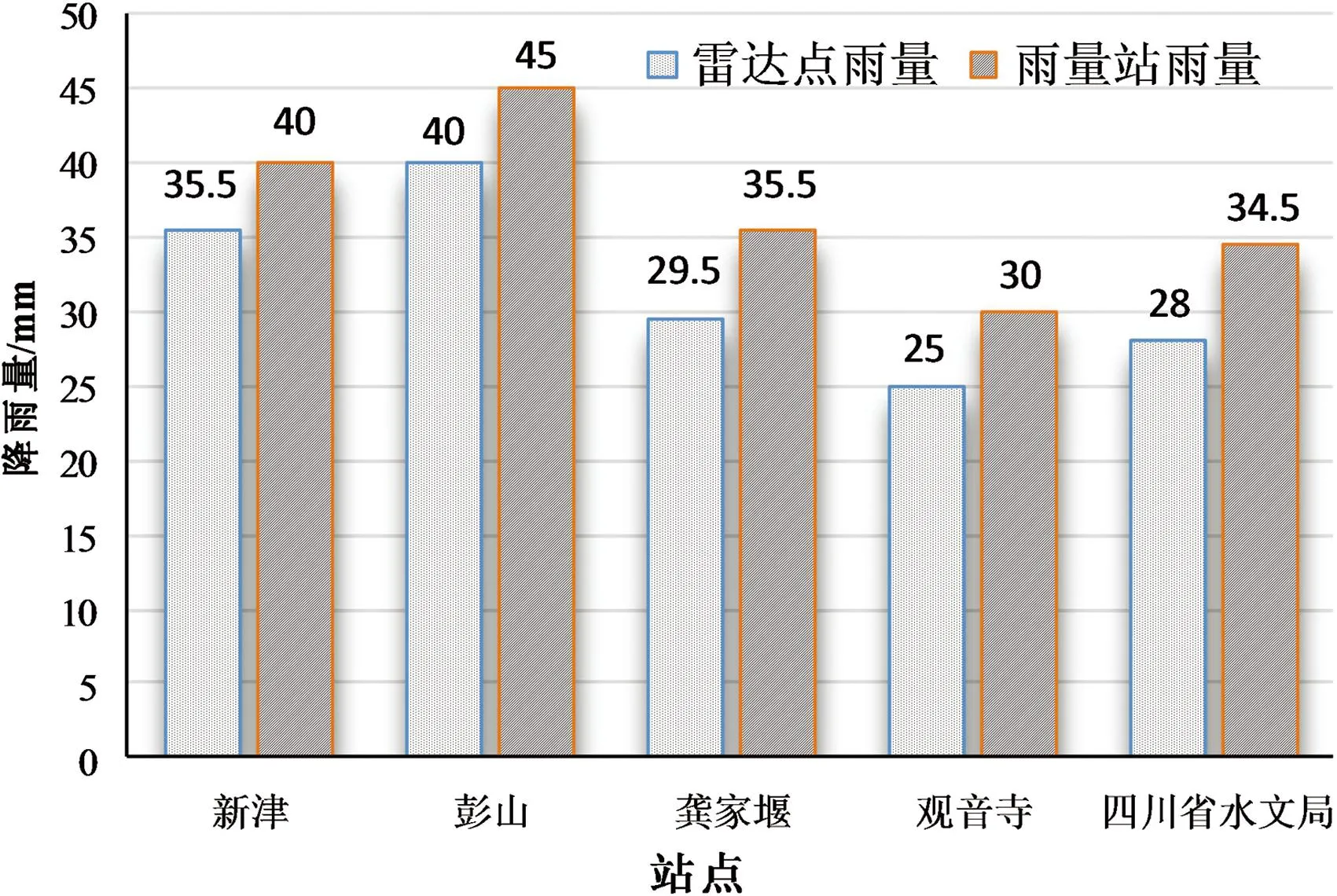
图6 雷达累积雨量与雨量站雨量对比
4 结语
雨量雷达与雨量站对同一次降水过程存在误差的原因除了两者自身的系统误差外,从原理上分析,雨量雷达是通过探测降水回波强度进行降雨量反演,而雨量站是直接测量;从探测目标分析,雨量雷达是测量空中降水,而雨量站是测量地面降水,考虑到雨滴在空中的碰并、蒸发等因素,雨量雷达测量值应略大于雨量站测量值。