基于激光扫描技术的土石坝三维整体变形监测技术
——以通江县方田坝水库为例
2023-12-30姚福拴王玉山肖恩尚李树勇
姚福拴,王玉山,伍 彪,石 峰,肖恩尚,李树勇
(1.中国水电基础局有限公司,天津 301700;2.上饶市水利局,江西 上饶 334000;3.四川大学水力学与山区河流开发保护国家重点实验室,成都 610065)
0 引言
土石坝是一种充分利用当地材料的坝型,由岩土散粒体材料通过外力压密填筑形成,土石坝如果产生过大的变形,将不能满足拦洪蓄水的要求,而不均匀变形往往又会引起坝体裂缝,导致集中渗漏,给工程带来危害。土石坝施工过程中的变形分布和演化对土石坝的稳定性有重要影响。
三维激光扫描技术是一种非接触性快速测量技术,又称“实景复制技术”,是继 GPS 技术之后的又一次技术革命[1],该技术可以实现目标物→点云数据→实景模型的逆向化建模过程,可以改变传统的单点监测模式,实现对目标物整体的动态测量。经过多年的研究,三维激光扫描技术逐渐成熟,在滑坡、基坑、隧洞、桥梁及建筑物变形监测中均得到了有效应用。罗德安等[2]提出了基于三维激光扫描技术的整体变形监测理论,并验证了该技术在整体变形监测中的可行性;Ventura et al.[3]、Chigira et al.[4]、徐进军等[5]利用三维激光扫描技术对滑坡变形演化进行监测分析,监测精度为毫米级,取得了满意的结果;陈致富等[6]对三维激光扫描技术监测基坑变形进行了探讨,针对该技术在基坑监测中存在的问题提出了一些解决办法;董秀军等[7]在高陡边坡调查中运用三维激光扫描技术解决了高陡边坡数据获取难的问题;S. Fekete et al.[8]、李海波等[9]将三维激光扫描应用到隧洞当中,测量出了洞室开挖围岩的超欠挖量;E.H.Wang et al.[10]应用三维激光扫描技术测量桥梁的受力构件的变形情况,为桥梁安全评估提供了依据;张舒等[11]、李强等[12]采用三维激光扫描技术测量了地表沉降量,获取了地表的变形情况。
目前,国内土石坝变形监测通常采用GPS或全站仪等传统的单点式监测方法,缺乏整体变形资料。三维激光扫描技术可以高精度、快速、完整地扫描坝体,通过多站点扫描,能够采集完整的大坝点云数据,通过点云拼接配准、模型重构等手段可以构建精准的三维数字模型,采用叠差变形测量技术能实现对水库大坝的变形监测。本文以通江县方田坝水库大坝为例,基于三维激光扫描技术对大坝整体变形监测技术方法进行了研究,研究成果作为传统监测手段的补充,克服了传统监测手段的不足,可为大坝的整体变形监测方案制定提供技术参考。
1 点云数据采集
1.1 工程概况
方田坝水库位于小通江河右岸一级支流冯家沟上游河段,坝址位于通江县民胜镇方山村内,属于小(1)型水库,具有城乡供水、农业灌溉及防汛抗旱等功能。大坝正常蓄水位577.5 m,坝顶高程581 m,顶宽6 m,坝长365 m,最大坝高41.5 m,最大坝底宽194.9 m,心墙位于坝体中部偏上游1.5 m,厚0.8 m。该水库原为20世纪70年代建成的小(2)型水库,大坝为黏土心墙坝,除坝基局部渗漏外大坝运行基本正常。根据相关规划、水库建设条件及周边综合利用要求,将其扩建为具有城乡供水、农业灌溉等综合利用功能,并作为抗旱应急水源的小(1)型水库。水库大坝扩建应用了纵向增强体心墙新坝型,在国内尚属首例。新建大坝采用刚性混凝土作为增强体心墙,新坝型为混凝土心墙土石坝。该坝型是直接在老坝基础上进行加高,并浇筑混凝土心墙,这种方式既能提升施工速度,又能降低施工成本。由于此类工程并无先例进行参考,因此,施工过程中的坝体变形规律和特征尚不清楚,有必要对施工过程中的坝体变形进行全面监测。
1.2 方案布置
使用三维激光扫描仪获取大型工程的三维点云数据时,一个扫描站点不能获取全部的工程信息,往往需要通过多个站点共同配合,最后拼接成一个整体。点云数据在拼接过程中会产生误差,拼接次数越多,误差也就越大。如果扫描站点设置过多,在点云数据拼接配准时就会使误差增大;如果扫描站点设置过少,激光的入射角度越大,获取的目标物点云数据就会减少,会导致目标物表面部分几何信息失真,无法达到监测目的。因此,需要选择合适的站点间距,在尽可能少的扫描站点中获取完整的目标物点云数据。
站点间距应该根据最大入射角确定,假设扫描仪与目标物之间的距离为S,站点之间的间距为D,激光发射的方向与扫描仪到目标物的垂直方向的夹角为最大入射角θ,以最大入射角扫描重叠的区域为M,如图1所示。

图1 站点间距与扫描重叠区示意
根据几何关系,可以得到:
(1)
根据研究经验[13],H=D/2,H=S,即θmax=45°时能够满足要求,此时D=2S。Lichti et al.[14]通过试验表明,当θmax>65°时,配准误差开始急剧上升,因此,取θmax=65°时,H=2.1S,即D=4.2S。所以,在满足扫描需求的要求下,测站间距的设置范围为(2S,4.2S),此时,扫描重叠区的范围为20%~30%。
结合方田坝现场勘探结果和站点间距设置范围,本次变形监测控制点设置方案为:在坝肩左侧设置2个站点、右侧设置1个站点,沿坝顶面设置4个站点,坝体上游侧和下游侧各设置2个站点,共计11个站点,可采集完整的坝体点云数据,控制点分布如图2所示。

图2 控制点分布
2 点云数据处理
2.1 基于Delaunay三角网改进的ICP算法
三维激光扫描仪在控制点获取的点云都有独自的坐标系统,点云配准时首先将不同站点的三维点云数据转换到统一的坐标系统(本文使用的是大地坐标系统),然后通过“重叠区”将点云拼接成完整的坝体。
由于大坝扫描站点多、点云数据量大,拼接配准时不仅要消耗大量的时间,而且会导致误差增大。为了改善这些问题,本文采用基于Delaunay三角网改进的ICP算法对数据进行处理,通过软件中的内置函数Delaunay,首先,将空间中无组织的散乱点集剖分成一个个不均匀的三角形网格,然后,在迭代过程中迅速搜索最近点,快速完成迭代过程。
该方法通过奇异值(SVD)分解法进行最优化解析,通过求取误差函数的最小值进行计算。在迭代过程中,函数迭代一次就可以返回各点的邻近点,然后利用函数迭代返回的线索矩阵快速准确地获取每个点的邻近点。通过这种方式能够迅速找到基准点云与待配点云之间的映射关系,再使用解算方程得出两组点云的变换矩阵并使其一一对应起来,最后就可以解出基准点云与待配点云配准的最优解。
具体求解过程是:假设基准点云为X,待配点云为Y,Z是两组点云集合的重合点集,P是重合点集中的任意一点,在基准点云和待配点云中的坐标分别为xi,yi,N是P在X、Y上的坐标向量,(R,M)是待求的变化参数,分别代表旋转矩阵和平移矩阵,配准的总误差函数为:
(2)

(3)
将各点坐标平移到以各自点集重心为原点的坐标系中,即:
(4)
将式(4)带入式(2)中,总误差E为:
(5)
此时,只需求解R,使E达到最小值,位移向量为:
(6)
将式(6)代入式(5)中,可得:
(7)

(8)
通过对矩阵进行奇异值(SVD)求解,可以得到两个矩阵,分别是U和V,因此可以得出结论:RH(Trace)为最大值时R=VUT,当R解算之后,通过式(6)可以求出位移向量T,快速完成迭代。试验表明,基于Delaunay三角网的ICP算法迭代收敛性很好,误差小,收敛速度得到了大大提高。配准后的大坝点云模型如图3所示。
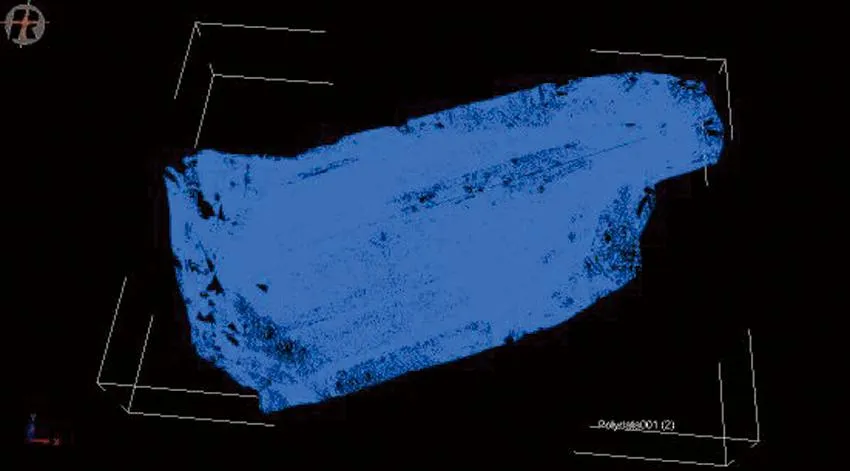
图3 大坝点云模型
2.2 叠差变形测量技术
通过点云配准之后,可利用Geomagic软件构建精准的三维数字模型,将第一期的三维数字模型作为基准模型M,第二期的模型作为待测模型N,采用叠差变形的测量方法进行变形计算,叠差变形测量原理如图4所示。
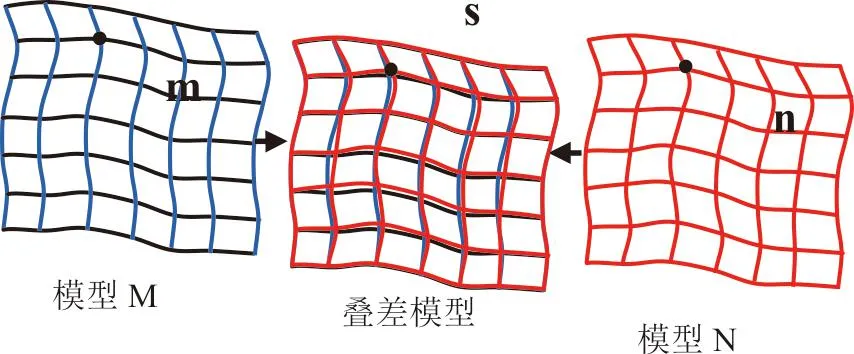
图4 叠差变形测量原理示意
从上图可以知道,模型M中的任意一点m的坐标值为(x,y,z),在模型N中的同名点n的坐标为(x1,y1,z1),因此,m、n两点之间的距离S就是两点之间的变形,变形值为:
(9)
式中,△xs、△ys、△zs分别为点m和点n在x、y、z方向上的变形值,具体表达式见式(10)。
(10)
通过叠差变形的测量方式可以知道目标物任意一点的变形值(包括三维坐标方向的变形值),同时,也可以表达点、线、面、整体的变形情况。
3 土石坝变形分析
本次试验通过获取方田坝不同时期的三维激光扫描点云数据进行分析比较,采集数据时大坝处于施工期,上下游未开始蓄水,变形的主要原因是自重荷载和心墙与坝壳之间的差异沉降。
3.1 整体变形分析
采用Geomagic软件构建精准的三维数字模型,将第一期扫描获取的三维数字模型设置为基准模型,第二期的模型设置为待测模型,通过叠差变形测量技术,计算大坝的三维变形情况,如图5所示。
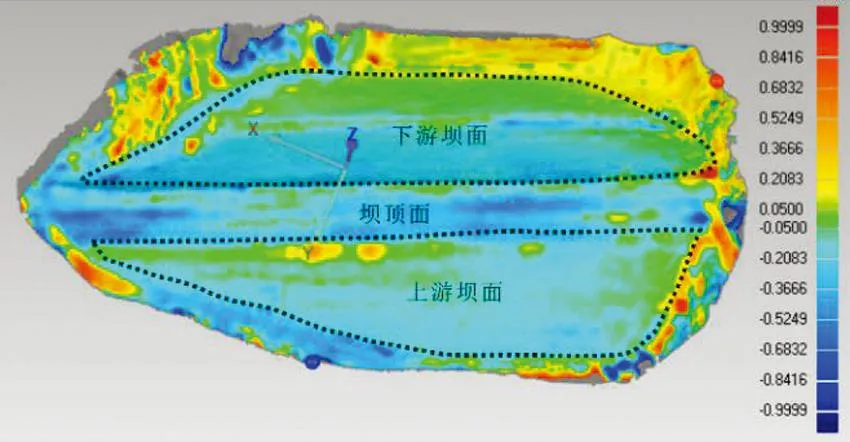
图5 整体变形分布
图5以沿曲面法线方向为正,与法线方向相反为负。从图5中可以看出,两期扫描数据的平均变形值22.91 cm,大坝坝面及坝顶变形值均在20 cm左右。坝体各区的变形量随高程的上升而增大,坝顶面最大,坝体的变形主要表现在自重作用下的流变,坝体因流变产生的平均沉降量在20 cm左右。个别区域和大坝与山体连接处变形较大,结合现场情况,出现这种差异的原因主要有两个:一是大坝与山体连接处有道路,来往车辆与人员较多;二是大坝仍在施工期,道路上容易堆积泥土等杂物。
根据土石坝设计规范,坝顶变形量不宜大于坝高的1%。已知最大坝高为41.5 m,因此,22.91 cm<41.5 m×1%=41.5 cm。所以,变形满足规范要求。
3.2 点变形分析
通过提取上游坝面、坝顶面及下游坝面等各区域的特征点可有效地了解各特征点的变形值,更好地理解大坝的变形情况。特征点选取时应避免坑洼、堆土等人为导致的区域,分别以上、下游坝面及坝顶面为对象选取特征点,获得各点的变形情况,如图6所示。

图6 特征点变形分布
从图6、图7和表1可以看出,两期扫描数据的特征点平均变形值为18.85 cm,在大坝坝顶选取的9个特征点中,最小变形值5.14 cm,最大变形值为27.63 cm。通过对特征点变形值对比分析可知:特征点在X轴方向上的变形值最小;在Y轴方向上的变形值较小;在Z轴上的变形位移数值最大,与平均变形值数值相近且变化一致。由此可知,特征点的变形位移主要表现为Z轴方向上的沉降变形。

表1 特征点变形值 cm
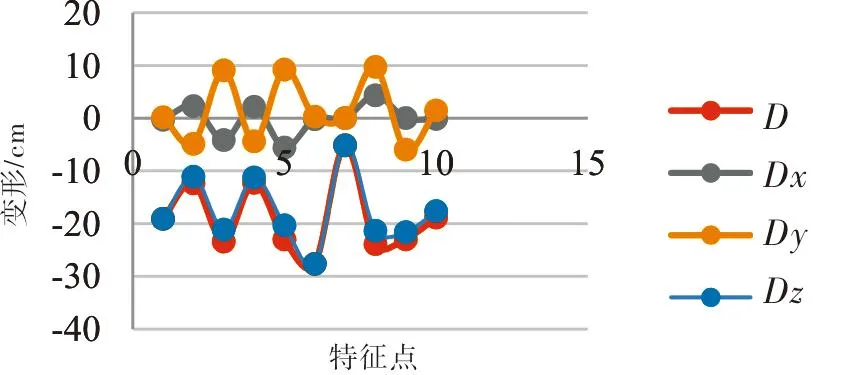
图7 特征点变形
3.3 线沉降变形分析
特征点变形仅能反映出离散的变形特征,不能反映出连续的线性变形特征。分别在YZ平面和XZ平面截取剖面,可以直观地反映出大坝在剖面上的沉降变形规律,如图8所示。
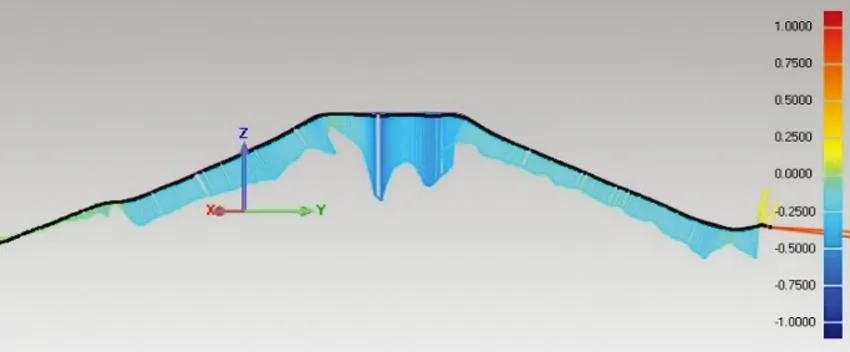
(a)YZ平面剖面线
从图8中可以看出,在YZ平面上,上游坝面沉降值大于下游坝面沉降值,坝顶沉降值最大,心墙位置处沉降出现“拱效应”。因为一方面堆石体自身参数的离散性较大,坝址区又存在10 m厚的覆盖层;另一方面防渗体采用变形较小的混凝土心墙,所以方田坝坝壳的沉降速率大于心墙沉降速率,坝壳对心墙将产生竖直向下的拖拽力,心墙内部应力增加,相当于承受了坝壳部分的重力,坝壳内部应力减小,出现“拱效应”。在XZ平面上,坝顶段两端沉降较小,最大沉降值出现在中间坝段,沉降变形从坝体两端向中部逐渐增大,即沉降变形分布表现为中部的沉降量大于河岸两侧的沉降量且逐渐减小。这是因为坝体内部颗粒之间的孔隙被压缩,颗粒之间相互作用产生沉降,由于左右坝肩的存在,土体间的传递就会被阻碍,这种阻碍会一直向左右两岸传递,从而导致中间坝段的沉降量大于两岸方向的沉降量。可以看出大坝监测沉降变形分布规律良好,符合工程经验。
4 数据对比验证
由于大坝处于施工期,大坝表面监测设备还未建成,所以本次试验使用全站仪对布置在大坝各区域的11个控制点进行测量,得到了二期控制点的坐标值。为检查三维激光扫描技术监测结果的可靠性,先将全站仪测量的两期控制点坐标进行差值并设为基准坐标,再将三维数字模型中两期控制点坐标进行差值并设为待测坐标,最后用待测坐标减去基准坐标并取绝对值,结果见表2。

表2 待测坐标与基准坐标差值绝对值 mm
从表2可以得到,参考坐标与测试坐标差值绝对值最大不超过4 mm,表示点云数据拼接后构建的三维数字模型中的控制点与全站仪测量的控制点坐标略有差别,误差不超过4 mm,其中x和y方向的误差不超过3 mm,误差基本可以忽略不计,证明三维激光扫描技术相对传统全站仪监测技术来说,满足精度要求。同时,不仅能得到控制点的变形情况,还可以高效地得到整个大坝任意位置的变化情况,凸显了三维激光扫描技术在大坝变形监测中能够进行大坝整体动态监测的优点。
5 结论
本文以方田坝水库大坝为研究对象,通过三维激光扫描技术对坝体进行扫描,通过点云拼接、配准、模型重构等建立了方田坝坝体的三维数字模型,使用叠差变形测量技术从整体、特征点、剖面三个层次对坝体及心墙进行了变形分析。结果表明,坝体各区的变形量随高程的增加而增大,坝顶面最大,主要表现为Z轴方向上的沉降变形;大坝变形分布表现为中部的变形大于河岸两侧的变形且逐渐减小,混凝土心墙变形小于堆石体变形,出现“拱效应”,这与心墙的材质相关。该技术实现了大坝整体三维变形监测,突破了传统的以点监测为主的模式。
采取了两种技术方法对方田坝水库大坝变形进行分析,将三维激光扫描技术得到的变形结果与全站仪测量技术计算得到的结果进行对比分析,对比显示变形数字相近、变化规律一致,证明将三维激光扫描技术用于大坝变形监测具有一定的应用前景,将该技术用于生产实践具有一定参考价值和现实意义。