纯电动汽车机电复合制动控制措施
2023-12-29李恒熙
摘要:电动汽车能够有效利用可再生能源,具有清洁无污染特点,但受制于动力电池技术影响,存在续驶里程有限等缺陷。为保证纯电动汽车制动安全,提高制动能量回收利用率,对纯电动汽车机电复合制动系统组成及控制原理、模糊控制电机制动力分配、前后轴制动力分配的动力分配方式等方面进行讨论,并提出纯电动汽车机电复合制动能量回收控制措施。
关键词:制动踏板;纯电动汽车;模糊控制;能量回收;机电复合制动
中图分类号:U469.72 收稿日期:2023-07-12
DOI:10.19999/j.cnki.1004-0226.2023.09.003
1 纯电动汽车机电复合制动控制系统
1.1 机电复合制动系统组成
纯电动汽车在制动过程中,其内部电机可提供制动力矩,在制动力矩的作用下,纯电动汽车可产生制动效果。同时,电机在纯电动汽车制动过程中处在发电工作状态,能够依托能量管理系统,将部分纯电动汽车动能进行回收,将其存储到纯电动汽车电池当中[1]。即纯电动汽车在制动期间,能够同时完成生成制动力矩、回收消耗动能的工作,有助于延长电动汽车行驶里程。此外,由于电动汽车制动环节所需要的转矩要大于电动机能够产生的转矩,所以通常情况下,纯电动汽车制动系统组成应包括机械制动系统与电机系统,即本文所要研究的复合制动控制系统。但如何有效分配电机制动力矩与机械制动力矩,成为当前最迫切的问题。
1.2 机电复合制动控制原理
分析机电复合自动控制原理,需要从机械制动以及电机制动这三个方面进行讨论。a.机械制动。此种制动方式需要借助液缸或气缸与制动盘的摩擦,促使纯电动汽车实现车辆减速。b.电机制动。此种制动方式需要在特定制动需求的影响下,利用轮胎与地面的摩擦,依托传动系统促使电机发生转动行为,从而保证电机的发电工作状态。并且,由电机电枢产生的制动电流在整个过程中,会通过AC/DC变换器转换作用,以电能形式存储到电储存装置中。需要注意的是,电机制动方式能够提升纯电动汽车能量利用率,可以有效延长车辆行驶里程。c.基于前驱的纯电动汽车复合制动系统。通常情况下,前轴制动力矩组成包括机械制动力矩与电机制动力矩,后轴制动力矩则依靠机械制动系统提供动力。具体来说,可按照如下公式系统性理解机械复合制动控制原理:
Fc=Ff+Fr (1)
Ff=Fe+Fmf (2)
Fr=Fmr (3)
式中,Fc为总制动力;Fe为电机制动力;Ff、Fr分别为前轮制动力和后轮制动力;Fmf、Fmr分别为前轮机械制动力与后轮机械制动力。
2 纯电动汽车机电复合制动动力分配
2.1 纯电动汽车模糊控制电机制动力分配
对于复合制动系统来说,电机是重要的组成部分,直接影响纯电动汽车能量再生利用、制动安全[2]。因此,为最大限度保证车辆制动环节安全性,需要从两个方面进行控制:a.在综合性考虑电机工作特性曲线后,需要进一步明确电机功率以及制动力矩受电机转速的影响特征;b.在电机制动回馈环节,为避免发生严重的电池损害问题,提高紧急情况出现时电机制动作用的测出效率,还需重点考虑纯电动汽车总制动力、电池SOC等影响因素。而上述两方面涉及模糊控制器,因此需要基于模糊控制,并借助专家经验设计而来的模糊规则,有效控制复杂对象[3]。
对于模糊控制器来说,车速、总制动力、电池SOC都是重要的输入变量,而在结合纯电动汽车差异性工况所提出的制动需求、行驶状态要素进行考虑后,可将纯电动汽车制动需求总制动力F按照由小到大的顺序,排成论域区间,并在[0,2 500]之间对应L、M、H、HB四个模糊集;可将纯电动汽车车速V排成论域区间为[0,100]之间的L、M、H三个模糊集;可将纯电动汽车电池SOC按照论域区间[0,1],排成由小到大的VL、L、M、H、HB五个模糊集。此外,模糊控制器输出比值k应选取电机制动力与总制动力比值,并且该比值可分为分别代表0,0.1,0.2,…,1的f0,f1,f2,…,f10这11个模糊集。
一般情况下,除要运用较为平滑的gauss2mf型函数外,在选用输入数值时,尽可能选取三个具有较小系统稳定性影响的数值。同时,为有效提高模糊控制器输出分辨率,其输出量K隶属函数应选择trimf型这种比较陡峭的函数。此外,整个模糊控制推理过程需要应用Mandani法模糊逻辑,并采取重心法(centroid)解模糊。
除此之外,如果电动汽车需要行驶在较为拥堵的城市路段,并且整个行驶过程速度偏低、电池SOC较低,则电机是提供该纯电动汽车制动力的主要依靠;但如果此时电池SOC相对较高,则机械制动系统可提供一部分制动力矩。当纯电动汽车所行驶路段为高速公路下长坡路况时,如果此时电池SOC相对较低,则该车辆总制动力需要由电机制动力承担;如果此时SOC比较高,则电机制动可以不参与或少参与车辆制动过程。
2.2 纯电动汽车前后轴制动力分配
在分析纯电动机汽车前后轴制动力的分配时,需要按照理想制动力分配、基于ECE法规则的制动力分配、电机制动系统优先的前后轴制动力分配的顺序进行。
a.理想制动力分配。当纯电动汽车在制动过程中,为保证整体制动过程的安全性,要求车辆前后轴按照I曲线完成制动力分配,并且在充分利用地面附着系数的时候,可有效避免发生后轮侧滑、前轮失去转向能力的问题。但在能量回收角度考虑此种分配方式,会发现这种分配方式对于前轴来说,所分配制动力相对较少,由此会降低电机制动提供的制动力矩,难以保证纯电动汽车制动过程产生的相关动能。
b.基于ECE法规则的制动力分配。根据联合国欧盟经济委员会所制定的ECE法规,可知当前对于双轴汽车提出了关于前后制动器制动力的新要求。具体而言,对比ECE法规的制动力分配与影响制动力分配曲线,可明确在同等制动强度下,前者可为纯电动汽车前轴提供更为丰富的制动力,但由于此种分配方式远离I曲线,所以即便具有高效化回收制动能量的优势,也无法保证纯电动汽车电机在制动过程中的安全性。
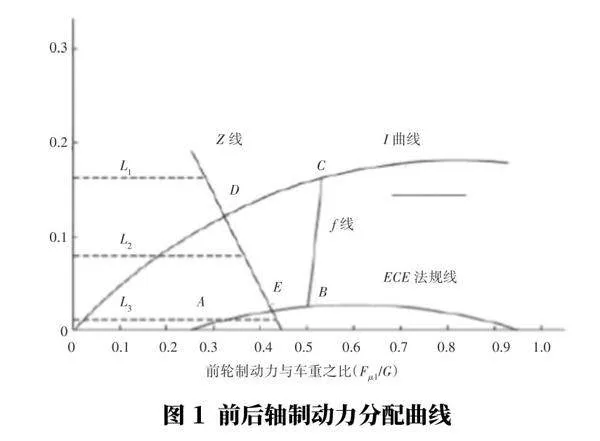
c.电机制动系统优先的前后轴制动力分配。如图1所示,可以明确在既定的制动强度(确定的一根z线)下,如果所选择分配点靠近OC曲线,这种分配方式可以最大限度地利用路面附着系数,具有明显提高制动过程安全性的作用;如果所选择分配点靠近OA、AB、BC曲线,则此种分配方式可以向纯电动汽车前轴提供更多的制动力,有助于推进电机参与纯电动汽车制动过程,并实现回收多项能量的目标。
需要注意的是,电机发动功率除了受以上相关因素影响外,还会受到自身特性约束,所以即便是向电机分配制动力,也未必保证机电复合控制系统会回收所有能量。再加上电动汽车制动能量存储环节,为减少发生电池损伤,需要针对性考虑电池状态。因此,在具体分配制动力前,应多维度考察各项自动执行机构现阶段的工作状态[4]。
对此,本文认为有必要重点考虑电动汽车前轴电机制动力,即优先由电机提供制动力,然后通过对前后轴机械摩擦制动力进行调整,确保各项制动力分配点能够靠近I曲线。如果结合图1中L1虚线进行分析,即代表着电机所提供制动力Fe在一定制动强度下,会小于D点所对应的Fu1。此时,应按照D点分配前后轴制动力,并且前轴制动力与机械制动力和电机制动力的和相等。分析图1中的L2虚线,则可明确如果电机所提供制动力Fe与Fu1相等时,则应该按照DE线段中的Fe=Fu1点进行分配。此时,前轴制动力与电机制动力相等。分析图1中的L3虚线,则可认为在Fe比Fu1大时,应按照E点完成车辆前后轴制动力分配工作,且此时前轴制动力应与电机制动力相等。假使在该过程中,纯电动汽车需要较大的制动强度,则应保证I曲线与Z线交叉点位于C的右侧。同时,为确保纯电动汽车制动过程中的稳定性和安全性,建议所有在I曲线上的前后轴制动力分配点都应该由机械制动系统提供动力。
3 纯电动汽车机电复合制动能量回收控制措施
电机制动力在能量回收过程中会受到控制策略、行驶速度以及电池SOC相关因素的影响,所以一般情况下,在制定能量回收策略期间,需要针对性考虑纯电动汽车运行条件,并充分结合驾驶员制动需求,提出最适宜的控制策略。其中,运行条件主要是指汽车速度大于10 km/h、SOC的值小于90%。
经过测量及标定纯电动汽车液压制动系统,可确定车辆制动踏板开度、制动强度关系。其中,当制动踏板开度为0%~19%范围,则可认为该状态下的车辆处在机械制动踏板空行程,整个行驶过程可以避免出现制动误触和拖滞。然后,当制动踏板开度达到10%状态,为提升自动响应速度,可通过增加电机制动力的方式,将制动踏板空行程增加到10%。
总体来说,以液压制动为基础,通过增加电机制动的方式,伴随踩下制动踏板的行为,可以实现回收制动能量的目标[5]。但在此期间,为同步保证回收制动能量与制动安全,需要依托不同制动强度选择有针对性的制动策略。例如,在0<Z≤0.1时,通常只伴随电机制动。但如果继续踩下踏板,在Z处于0.1~0.8区间范围时,则会同时产生机械制动与再生制动,此时车辆应做减速处理。如果Z持续增加,上升到0.8以上,则仅由机械制动进行作用。
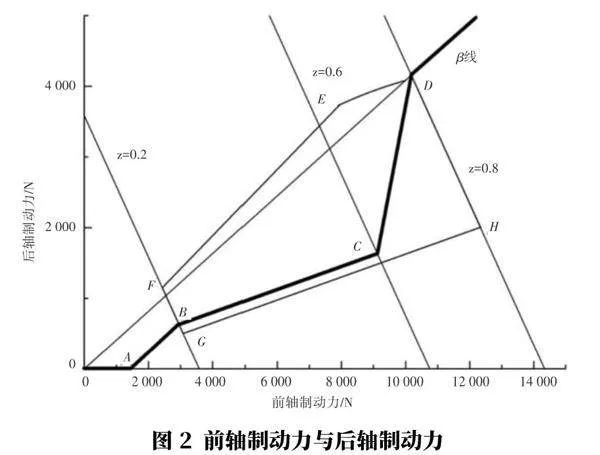
此外,结合前后轮利用附着系数、ECE制动曲线,可进一步确定制动力分配系数范围,即系数β在0.68~0.86区间范围内,此时前轴制动力与后轴制动力如图2所示。
如果制动强度Z在0.2~0.8范围内时,此时制动力分配范围主要在DEFGH区域。在该区域内通过合理分配前后轴制动力,可以达到电机制动力最大化,并确保将电机制动力分配给前轴,即如OABCD曲线所示。
a.纯电机制动。
OA段为纯电机制动区间,此时制动强度范围在0~0.1之间,制动踏板开度在0~19%。总体来说,此种状态属于轻度制动,即车辆制动需求依靠电机制动即可满足,对于制动法规以及制动强度要求不高。
b.中低复合制动。
AB段为中低复合制动区间,此时制动强度范围在0.1~0.2之间,通过逐步引入机械制动力,可有效叠加恒定电机制动力,并将制动强度提高到0.1。
c.中等复合制动。
BC段为中等复合制动区间,此时制动强度范围在0.2~0.6之间,需要实现电机制动力最大化,即应尽可能选用最大的前后轴制动力分配系数β,提高前后轴制动力,借此有序增加附加电机制动力。
d.中高复合制动。
CD段为中高复合制动区间,此时制动强度范围在0.6~0.8之间,为进一步保证制动稳定性,需要逐渐减小电机制动占比,避免出现制动车轮抱死、驾驶异常等情况。通常,当制动强度Z=0.8时,电机制动力为0。
e.纯机械制动。
在D点以后的区间为纯机械制动范围,该区间制动强度大于0.8,属于紧急制动区间。一般情况下,考虑到安全性因素,在车辆发生紧急危险状况时,需要关闭再生制动系统,即完全依靠机械制动方式进行制动。
4 结语
本文基于保护纯电动汽车行驶安全,提出了充分回收运行动能以及制动力矩的思路,并讨论了不同的动力分配方式以及能量回收策略,进一步优化了车辆运行动能转化效率,以便能从多个维度入手提升纯电动汽车机电复合制动控制与分配效果。
参考文献:
[1]张庆永,朱志亮.纯电动汽车机电复合制动控制策略分析[J].福建工程学院学报,2022,20(3):232-238+243.
[2]刘威,祁宏钟,刘新田,等.纯电动汽车串联式再生制动控制策略建模与仿真[J].轻工机械,2019,37(1):70-73+77.
[3]杨凤敏,汪伟,王汝佳,等.基于模糊控制的纯电动汽车再生制动控制策略研究[J].江苏理工学院学报,2021,27(4):68-75.
[4]张炳力,闻静,黄鹤,等.智能纯电动汽车再生制动力控制策略研究[J].合肥工业大学学报(自然科学版),2019,42(1):13-18.
[5]潘盛辉,许平,宋仲达,等.基于改进NSGA-Ⅱ算法的纯电动汽车机电复合制动控制策略研究[J].现代电子技术,2018,41(7):97-101.
作者简介:
李恒熙,男,1974年生,高级工程师,数控技师,研究方向为中职教育——机电类教育。