基于交通流预测的隧道照明控制方法研究
2023-12-28苗荣霞李洁馨
苗荣霞,张 洋,李洁馨,王 幸
(西安工业大学电子信息工程学院,西安 710000)
1 引 言
由于隧道半封闭的环境,隧道内外的亮度差较大,在进出隧道时视觉上会形成“黑洞效应”和“白洞效应”,致使驾驶人员产生“视觉迟滞现象”。本着安全驾驶原则,必须提供隧道照明。随着隧道规模与交通量的激增,照明系统的耗能也在逐年增大。对此,研究人员从照明灯具、控制方法等方面进行了诸多优化研究。近年来,新建隧道大都采用节能型灯具以及自动控制技术,虽然在节能方面有了一定的进展,但是还存在着适应性差和无法根据交通量及车辆行驶状态等实际环境进行调光的问题。目前主要的控制方法有车进灯亮控制和按需照明控制等[1]。车进灯亮控制在交通流量较大时频繁调光会造成开关损耗;按需照明控制在交通流量较小时则会因为大部分是无用照明而浪费能源[2-3]。针对此问题,设计一种基于交通流预测的控制方法,根据预测的交通流量选择最佳控制方法。
2 基于交通流预测的照明控制方法
2.1 总体流程与算法结构
所设计的控制方法总体流程如图1 所示。在交通流量较大时,选择按需照明的控制方法,保证隧道照明亮度;当交通流量较小时,选择“车来灯亮车走灯暗”的控制方法,既保证通行安全,又可以降低耗能,同时也可以降低灯具的损耗以增加照明设备的使用寿命。
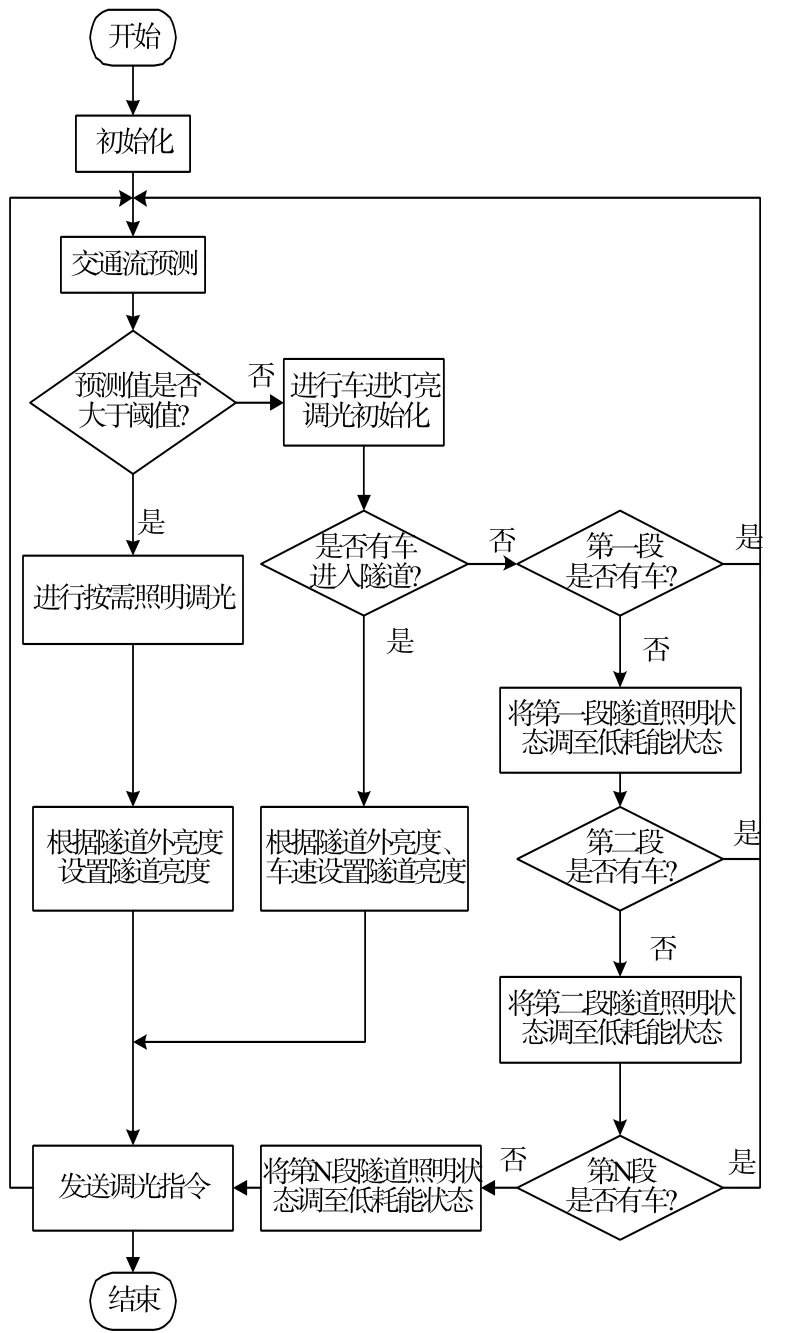
图1 按需照明总体控制流程
LSTM 算法结构如图2 所示。LSTM 算法整体上由记忆单元、遗忘门、输入门和输出门等部分构成。其中,记忆单元是LSTM 算法的核心,作为长期记忆的传送带,在图中用C 表示。输出门的输出值h 可当作当前时刻的短期记忆。因此LSTM 具有长短期记忆能力[4]。
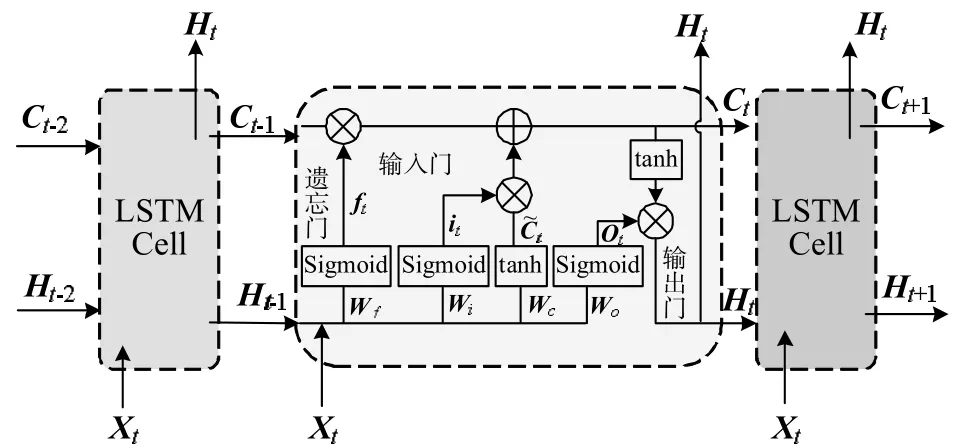
图2 LSTM 算法结构图
LSTM 各个部分的作用以及表达式如表1 所示,综合各表达式,便可共同构建交通流预测模型。
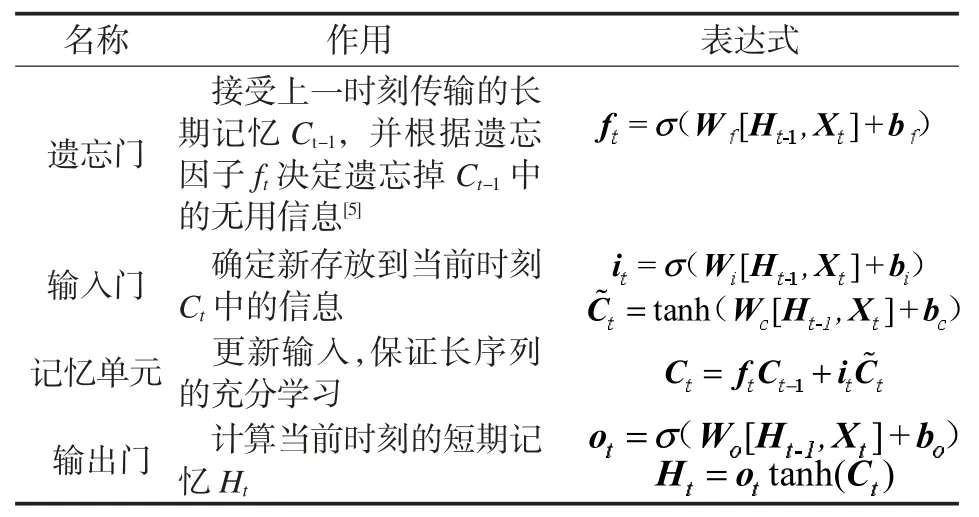
表1 LSTM 各部分表达式
2.2 构建数据集
选取某路段一段时间的交通量,时间间隔为5分钟,共有数据920 个。选取其中700 个作为训练集,剩余220 个作为测试集。部分数据如表2 所示。
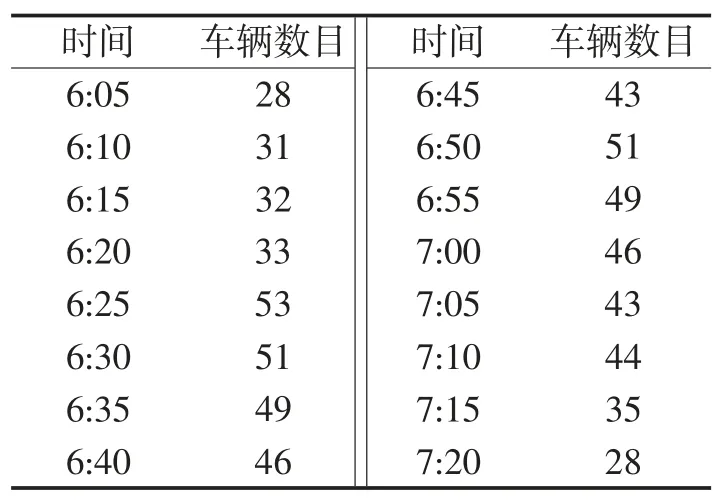
表2 部分训练数据集
在训练过程中,对LSTM 模型的隐藏层级、隐藏层神经元数目、学习效率等参数进行寻优,同时观测在不同参数设置下模型评价指标RMSE 的变动状况。RMSE 为均方根误差,其定义为:
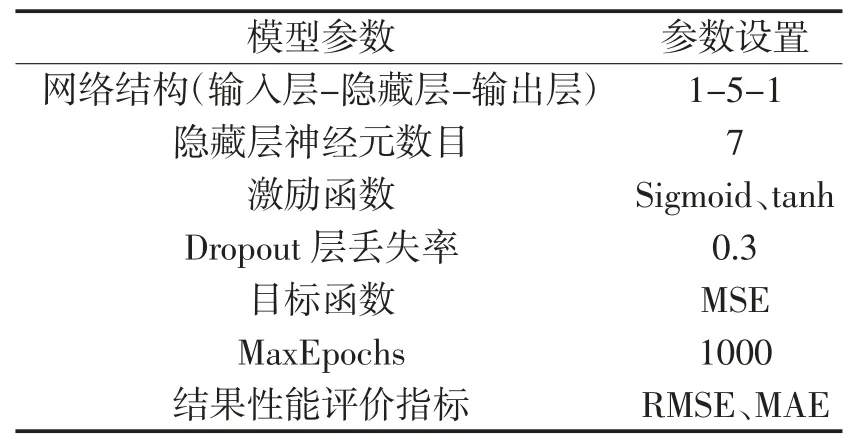
表3 LSTM 预测模型参数表
根据表中各参数对预测模型做出调整,对数据进行训练和测试。训练集预测结果图如图3 所示。可见预测值与真实值两者曲线将近重合,预测效果良好。测试集的训练效果如图4 所示。与图3 相比可见,测试集的拟合效果相对训练集较差,真实值相对于预测值有一定的滞后性,但是整体效果良好。

图3 LSTM 模型训练集预测结果对比

图4 LSTM 模型测试集预测结果对比
同时对模型的训练和测试集进行指标运算。预测结果如表4 所示。其中MAE 为平均绝对误差;MAPE 为平均绝对百分比误差。从数据可以看出训练集的模型预测结果接近97.5%,测试集的模型预测结果高达95%,均有良好的训练效果。

表4 训练集模型预测结果表
3 模糊PID 控制算法及仿真
3.1 照明系统传递函数数学模型
隧道灯光照明模型是一个多输入多输出模型,隧道内不同区段的灯光亮度是相互影响的。多输入多输出模型中照明亮度与输入电压的PWM 的占空比之间的离散时间的传递函数可定义为:
式中y(k)为系统输出;u(k)为系统输入;q-n为移位算子;a 为缩放增益,b 为偏移量。将设备的输入电压与LED 亮度的线性关系带入上式模型,即得到照明系统的传递函数[7]:
3.2 模糊PID 控制算法
为了使节能效果与照明效果兼顾,选择模糊PID 控制算法,其结构图如图5 所示。控制器利用采集到的洞外环境亮度和车速运算出照明亮度值,并利用由隧道各区段安装的传感器测得的实际亮度作为反馈。将输入量以及反馈输入量的偏差值以及偏差变化率作为模糊控制器的输入量,由模糊规则库进行模糊推理,在线输出△KP、△KI、△KD对KP、KI、KD三个参数进行自整定,利用整定后的参数对隧道内各区段的照明设备进行PID 调光。

图5 模糊PID 控制结构图
根据按需照明的亮度值,确定偏差和偏差变化率的论域。本研究中实际工程隧道长度为7920m,洞外亮度最大值约为3600cd/m2,隧道设计行车速度80km/h,按照现场条件确定入口段的亮度折减系数K 约为0.0372,并确定隧道入口段最大照明亮度为133.92cd/m2。按照上述参数,可设定偏差论域为[-120,120],偏差变化率论域为[-60,60],输出△KP、△KI、△KD论域[8]分别为[-3,3]、[-3,3]、[-0.3,0.3]。为简化模糊化过程,将模糊控制器的输入输出都分为{NB、NM、NS、Z、PS、PM、PB}7 个子级,所得到的输入量隶属度函数曲线如图6 所示。

图6 模糊输入隶属度函数设置
根据设定输入输出隶属度函数,然后设定模糊控制规则,控制规则如表5 所示。偏差和偏差变化率作为模糊控制器的输入,依据模糊控制规则,在线对PID 的三个参数进行调整。根据输入误差以及误差变化率设定49 条模糊控制规则[9]。
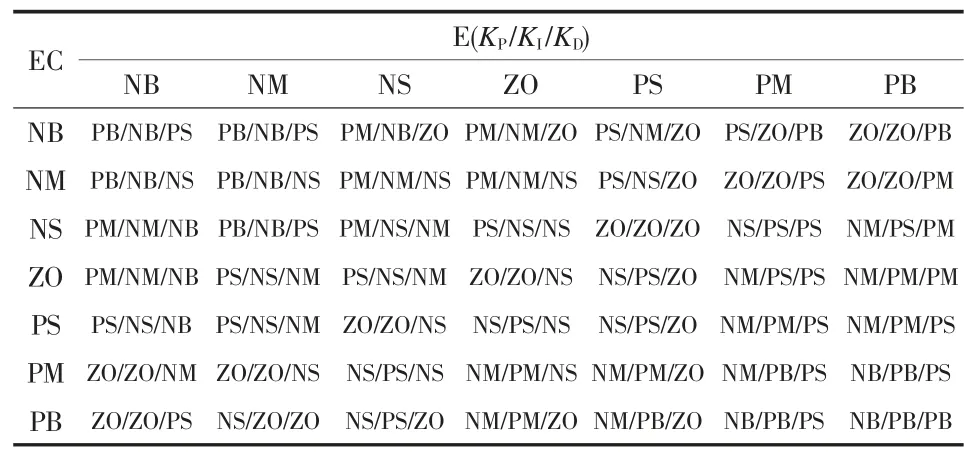
表5 模糊控制规则表
3.3 算法仿真
仿真第一部分为按需照明控制,以入口段亮度调节为例,将实际光照强度作为输入,基于隧道实际环境,入口段亮度折减系数为0.0372,光照强度和折减系数运算后作为模糊PID 控制的输入;第二部分为车进灯亮控制,当检测到有车辆行驶时,控制器输出需求亮度,当无车辆行驶时,照明设备调至低耗能模式;第三部分为基于交通流预测控制,先根据预测的交通流量选择控制方法,当交通流大于设定阈值,选择按需照明控制方法,小于阈值则选择车进灯亮控制方法。
模糊PID 输出的按需照明控制和车进灯亮控制的输出比较仿真结果如图7 所示。仿真表明,模糊PID 控制算法可以对照明设备进行精确控制,达到需求亮度,且误差较小。

图7 不同控制方法对比图
通过对比三种控制方法,经相关计算,基于交通流预测的控制方法相较于车进灯亮控制方法开关损耗减少84.3%;相较于按需照明控制方法节能8.49%。优化节能的效果显著,达到了设计预期。
4 结束语
从控制方法入手进行优化,提出基于交通流预测的隧道照明控制方法,利用模糊PID 算法对灯具进行控制。使用LSTM 交通流预测算法对车流量进行预测,测准确率高达95%以上,预测效果较好;利用预测的交通流量对未来一段时间的照明控制方法进行选择。基于交通流预测的照明控制方法避免了传统控制方法在具体应用中存在的问题,更大发挥了智能控制的精度,在满足照明需求的同时,最大程度节约耗能。
