自动化猫道设计在石油钻机上的应用研究
2023-12-28彭长江
彭长江
(中石化江汉石油工程有限公司,湖北 武汉 430070)
近年来,我国机械自动化水平逐渐提高,在此情况下,我国钻机行业具有越来越高的自动化程度,现阶段,我国已经研制出符合国际标准的石油钻机主体配套设备,相对来说,石油钻机外围配套设备还较为落后,存在危险系数高、劳动强度大等特点。在此种情况下,相关学者需要将石油钻机配套设施自动化水平作为未来重要研究方向,实现生产工具优化,在此过程中强化自动化猫道的设计和应用属于重要途径,可以在提高石油钻机工作效率的同时,使其配套设备具有更高自动化水平和安全性。
1 国内外自动化猫道发展现状
现如今,国内对钻井平台猫道的自动化研究起步时间短,对钻井平台猫道进行自动化研究的企业很少,大部分企业采用的是常规的猫道输送原油的方式,所以国内的自动猫道很少,比如,中国石油化工公司研发的一种自动猫道装置,它采用了液压缸和双摇臂,通过摇臂的动作,可以将汽缸输送到较高的高度,其在实际应用中具有适用性强、运输速度快的特点,但是也存在很明显的缺点,如能源消耗大、油压过高等。与国内相比,国外在设计石油钻机自动化猫道方面主要分为以下三类:(1)固定式自动化猫道。这种全自动猫道的主要特征在于它采用了一种固定的结构来进行设计,同时猫道的运转是在一条固定的铁轨上进行的,而猫道上的插槽则是用来运送管道。这一类型的自动猫道的构造比较简单,但是它仅能够在插槽中传送管柱,在进行装配作业时容易造成管柱的损耗,从而缩短了井下管柱的使用寿命。(2)提升型猫道。此种自动猫道主要组成部分为液压机构,内部管架为管柱输送工具,当管柱和钻机平台在水平上处于相同位置时,在推送装置的影响下管柱会运行到钻机位置。(3)机械手型。这种结构与常规的猫道结构有很大的不同,它是由机器人的手臂来进行的。这种设计思想的优点在于工作效率高、自动化程度高,但机器人的操作必须使用高负载的液压功率系统,相关企业需要投入非常高的成本用于运输、安装以及维修等工作,在大型石油钻机作业中较为适用。
2 石油钻机自动化猫道运行原理
在石油钻机实施钻井作业的过程中,自动化猫道运行原理能分为上钻台和下钻具两个方面:(1)在上钻台时,如果它是在较低的工况下,在猫道主体内是一个比较平坦的地方,当钻杆式的液压油缸伸出来以后,支架的一端就被提了起来。在自身的引力影响下,钻具开始向着卸料台的斜面进行滚转,在滚至卸料台本体时,将达到卸料架限位销位。这时离钻头最近的那一面的拉板液钢就会伸出来,这样就能起到顶起拨板的作用,如果这些情况都得到了解决,那么与限制销接近的钻头也会被抬起来,当钻头的高度超出了限制销后,在很小的一段时间里钻杆会朝着拉板斜道上滚,直至它滚进云梁的沟槽中,这时就会将安全销钉汽缸的保险销钉挤压出来,使主要液态的钢材处于伸长的状态,将前面的支撑架顶起来,把主梁推到预定的地方,这样主系统中的双向液压电动机就会开始工作,带动链轮进行各种动作。在这段时间内,钻具顶部的吊卡被卡死,完成了钻井平台的全过程。(2)下井时,第一个起作用的是起吊,它将钻杆往云顶上移动,推动小车与钻头的底座相接触,小车本身就有导向装置,可以用来驱动钻头,最后整个装置都会被吸入云龙的凹槽中,而在这个过程中安全栓也会起作用。当回收主要液态钢时,将会回收出安全针,接着起动推棒液开始工作,在运转期间,首先,将钻具移动到云梁凹槽上,将液压钢板驱动到猫道主体上的拉拔板,然后把钻具从猫道中推出来并送到排杆架上,至此,整个猫道下钻工具的整个过程就结束了。
3 石油钻机自动化猫道设计策略
3.1 科学调整送钻柱装置构成
送钻柱装置主要包含链条、踢出机构、传送本体、被动链轮总成、液压驱动马达、小滑车、安全销总成、主动链轮总成、调节顶丝等部分。使用石油钻机的过程在本质上就是依靠送钻柱装置向前或向后带动管柱,在系统实际运行过程中,管柱整个过程都会被固定在送钻柱装置中部V 形槽,而且安全销会设置在其传送本体两边,进而保证管柱固定在V 形槽中。小车实际运动中将带着管柱向着与之相同的方向移动,在拉杆的影响下,小滑车和链条同步动作,链轮转动带动链条运动,从而为顺利运行小滑车提供保障。
3.2 确定技术参数
在石油钻机猫道自动化控制中,运输管柱长度应始终处于最大状态,即13.5m,相应钻台面需为12 ~12.2m 高度,相对湿度要求为≤90%(+20℃),最大工作负荷为45kN,单根运行周期为120s,环境温度为-20 ~50℃,自重为32880kg,运输管柱最大直径为φ508mm,最大输出功率为55kW,该动力猫道如图1 所示。
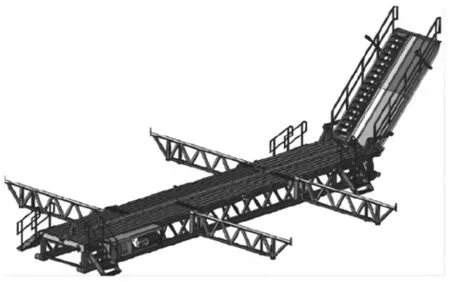
图1 动力猫道示意图
3.3 电气控制系统
在运动系统时保证参数合理非常重要,设置15A、220V/50Hz 的控制单元,75kW、380V/50Hz 的2 路动力电源。在控制系统监控工作方面,相关人员应努力做到稳定性高和效率高,以西门子PLC 相应的无线控制标准为依据,对司钻一体化控制、紧急控制、无线遥控等综合控制模式进行科学安排。
当PLC 控制器运转时,若发生局部故障,则当系统发生异常时,操作员可以通过当地的紧急操作台来实施系统检测,从而确保在维护过程中,该系统仍能正常运转。利用远距离无线远程控制方式,实现了对整个系统的远程控制与管理。在使用本系统时,有关人员应该采用按键式的自动控制模式,既要保证其动作的连续性,又要保证位置的准确性。在司钻一体化操作方式下,通讯是通过以太网实现的,从而形成了司钻一体化操作工作方式。
3.4 动力猫道操作流程
在动力猫道作业中,起钻是首个作业过程。有关人员要根据实际情况,将钻具放置在排管架的左边,施工人员要确保管排架的布局符合标准,最常用的位置是伸入的位置。将钻杆放进倾斜装置。将外倾机构及操纵保险销钉置于延伸位置,使钻柱提升至高于保险销,并将钻杆插入猫道中间进钻装置内。同时,根据工程的具体条件,对外倾机构展开了合理的设计,以保证该装置能够达到工程的各种要求。操纵绳双动卷扬机,将牵引装置推向钻杆机构,直至安放到位。接着操纵小车,在动力的作用下驱动小车,使钻具在钻台上移动。倾斜机构如图2 所示。
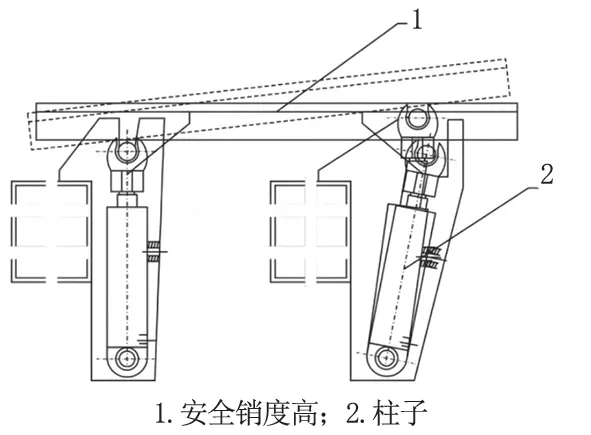
图2 倾斜机构示意图
由有关人员根据司钻组合系统的工作状态,使用钻具进行顶驱作业,并将钻杆下入V 形槽。当所有的钻杆钻进V 型槽后,确认它和挡板非常接近时才将吊卡打开。在这个过程中,钻杆一定要移动到与V 形槽完全接触的位置。然后,根据系统的操作规程来启动双动绞车,根据实际的使用要求将送钻柱装置降到与猫道水平面相齐的位置。之后,根据标准进行安全销作业,作业结束后再收回。根据说明书,并且把钻杆从V 形槽中推出来。最后,为了保证内倾斜机构稳定运行,务必将钻杆推到管排架处,然后将内倾斜机构调整到初始状态。踢出机构如图3 所示。
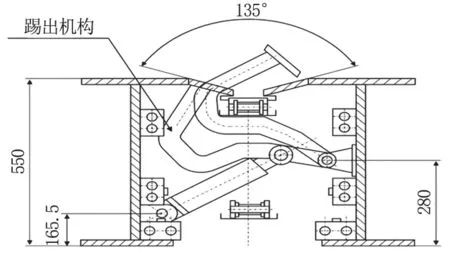
图3 踢出机构示意图
4 石油钻机自动化猫道设计应用案例
在开采某油井时相关人员使用了石油钻机猫道自动化设计方式,该油井具有如表1 所示的井身结构。
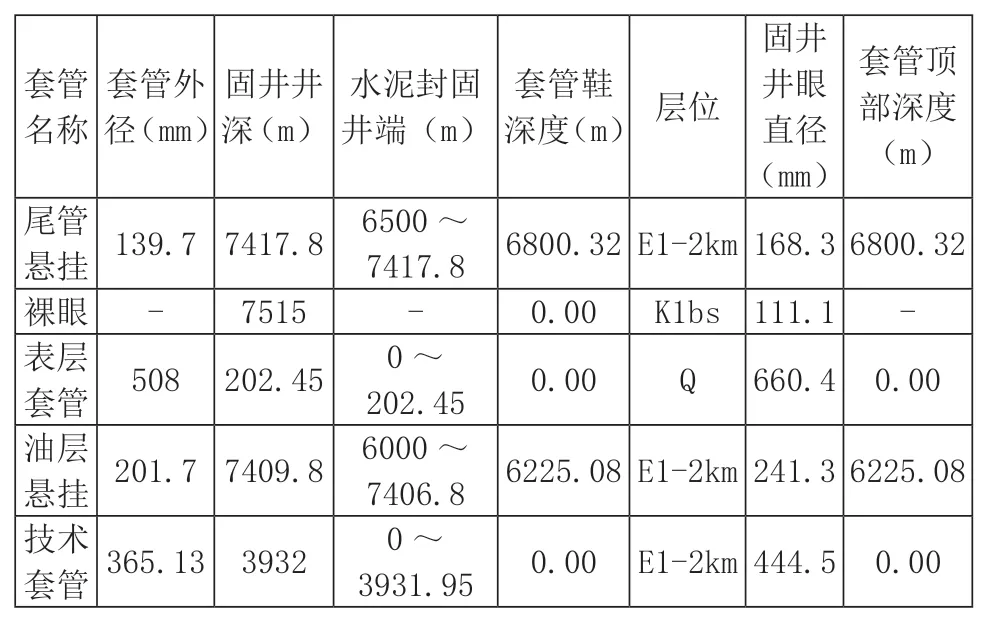
表1 井身结构情况
在开采该油井的过程中,气井钻井液密度附加值为0.07 ~0.15g/cm3,在进行实际操作时,可按照真实情况调整。很多钻井企业在工作中以油基钻井液体系为主,钻进时使用密度下限值,大幅度提升了井下施工的安全性。表2 为各井端密度设计情况。
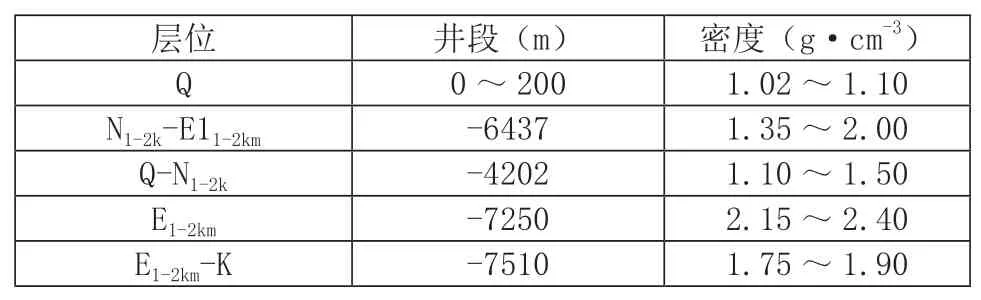
表2 各井段密度设计
相关人员在经过讨论后,决定使用ZJ90DB-S 钻机钻井,井下各个地点平均可达到7000m 深度,最大深度为7515m。要求将5-1/2”钻杆调整成5”钻杆后实施5开钻作业,而且应该接入新5117.26m5”钻杆,在开展作业时钻杆为表3 所示数值。

表3 常用钻杆数值
5 结语
近年来,我国钻井勘探技术越来越完善,在很大程度上提升了钻井机械的自动化操作水平。在落实钻井工作的过程中,要想使钻井工作具有更高的工作效率和安全性,相关人员可以合理搭配使用启动卡瓦、铁钻工、钻杆自动化处理装置、钻具自动排放装置以及动力猫道等。另外,在落实优化设计工作时,应科学调整送钻装置构成、合理确定技术参数、构建电气控制系统、制定动力猫道操作步骤等,依靠以上措施能够使我国石油钻机操作自动化水平得到有效提升。
