全自动驾驶列车唤醒逻辑流程阐述与分析
2023-12-27张坤,张豪
张 坤,张 豪
(中车青岛四方机车车辆股份有限公司,山东青岛 266111)
1 引言
随着全自动驾驶列车在城市轨道交通领域的推广,高度集中的控制系统代替了人工驾驶的操作,在全自动无人驾驶(FAO)模式下实现无人参与的列车库内自动唤醒、正线运营、回库、休眠、自清洁等全过程的智能控制,而列车的唤醒是系统智能“行使”控制功能的前提。本文设计了一种基于应用场景的快速唤醒控制技术,从唤醒方式、唤醒条件到信号系统发出唤醒指令、车辆接收指令,联动车辆各相关子系统实现自检、静动态测试、非预期事件发生的应对,直至列车的远程自动唤醒。
2 列车唤醒概述
列车唤醒是指从列车上电到列车具备投入运营条件的整个过程。列车唤醒包含3 种方式,分别为远程自动唤醒、远程人工唤醒以及本地唤醒。3 种方式的区别在于列车在唤醒过程中列车低压上电方式的不同。远程自动唤醒方式是列车自动监控系统(ATS)根据时刻表自动下发唤醒指令到列车,列车根据唤醒指令给列车上电。远程人工唤醒方式为调度员在ATS 工作站上操作,使ATS 系统下发唤醒指令到休眠唤醒模块,列车根据唤醒指令给列车上电。本地唤醒方式为司机在列车上通过激活旋钮激活列车,给列车上电。
3 列车唤醒测试
3.1 唤醒前提
列车能够被成功唤醒的前提与停车位置、预设模式或者全自动驾驶模式(FAM)开关位置、运行计划、车辆状态有着密切的关系,不同的前提条件组合分别对应不同唤醒方式,具体如表1所示。
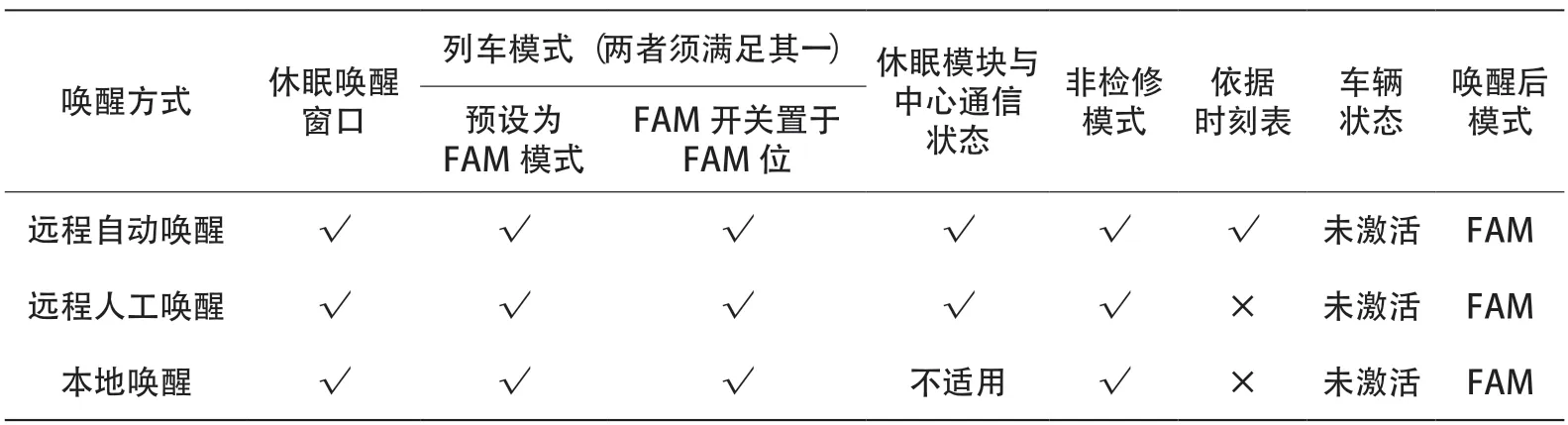
表1 列车唤醒前提条件

表2 唤醒测试结果影响分析表
3.2 唤醒检测
正常场景下,列车在低压上电完成后,进入唤醒检测,唤醒检测含上电自检、静态测试(含运转测试、联合测试)、动态测试。整个唤醒检测如图1 所示。

图1 唤醒检测示意
列车上电自检完成后,执行静态测试。上电自检和静态测试过程中,某一项或几项故障,允许继续执行直到静态测试完成,但不允许执行动态测试。动态测试过程中,若某一项故障,不允许继续执行动态测试。
3.2.1 上电自检
上电自检含低压上电自检和高压上电自检,在低压上电自检完成且无故障输出后,进行高压上电自检。
低压上电自检主要执行车辆低压系统和车载信号系统的上电自检。车辆低压系统自检主要为车辆网络、牵引、制动、车门、广播、辅助系统、空调、烟火、乘客信息显示系统(PIS)(含地面PIS 车载设备)、视频监视系统(CCTV)、数字集群通信系统(TETRA)等设备同时进行上电自检,自检结果由网络发送给车载信号系统。车载信号系统自检是对列车自动防护系统(ATP)、列车自动运行系统(ATO)、休眠唤醒单元、车载数据通信系统(DCS)等设备进行设备自检。
高压上电自检主要执行升弓控制、辅助逆变器、牵引逆变器等自检。当辅助逆变器供电系统充电机未能正常工作时,车载信号主机会上报中心报警,并输出停放制动指令及休眠指令,防止蓄电池过度消耗。
3.2.2 静态测试
静态测试包括运转测试和联合测试。
运转测试也指运转自检,运转测试包含空调启动自检和空压机运转自检。空调启动测试是指当列车控制及监控系统(TCMS)检测辅助逆变器运行正常且处于FAM 预备模式时,则发送启动测试指令给空调,空调接收指令后执行上一次停机之前的运行模式,并反馈启动测试结果。
空压机运转测试是指当TCMS 检测到辅助逆变器运行正常时,同时启动2 台空压机,直到总风压力达到测试要求后反馈测试结果。
列车联合测试是指在上电自检和运转测试通过后,进行联合测试。联合测试由车载信号主机主导,通过硬线或控制网络总线向车辆发送一系列测试指令,车辆接收指令后执行测试,并反馈测试结果给车载信号主机,形成闭环。联合测试包含制动系统测试、牵引/制动指令测试、紧急制动测试、车门功能测试。
制动系统测试过程为当制动系统检测到测试条件满足,由TCMS 向信号系统提出制动测试申请,信号系统同意后向车辆发送制动测试允许信号,车辆系统接收信号后开始执行制动测试。完成后通过TCMS 向信号系统反馈测试结果。
牵引/制动指令测试是指信号系统通过硬线给车辆发送牵引/制动指令,牵引/制动系统通过网络将牵引/制动指令反馈给TCMS,信号系统收到TCMS 反馈的牵引/制动指令后,判定牵引指令测试成功。
紧急制动测试过程为信号系统给车辆发送紧急制动施加/缓解指令,车辆接收到指令后将紧急制动状态反馈给信号系统。
车门功能测试是指信号系统向车辆系统发送开关门指令序列,序列顺序为先开右侧,再关右侧,再开左侧,再关左侧。车辆执行指令后通过TCMS 将车门状态反馈给信号系统。
3.2.3 动态测试
完成静态测试且无故障输出,进入动态测试。此时车载信号主机输出跳跃指令、方向与级位(牵引、制动)信息,车辆系统根据指令、方向、级位信息开始进行动态测试,跳跃动作完成后,车载控制器(VOBC)向车辆TCMS 发送跳跃距离值,车辆将跳跃执行反馈给信号。
4 唤醒异常处理
4.1 司机钥匙异常激活
在自动唤醒的不同阶段司机钥匙激活处理策略如下所述。
上电自检阶段,该流程不受司机钥匙激活影响,上电自检完成后有钥匙激活端的VOBC 自检成功后成为主控端。
静态测试阶段检测到司机钥匙激活后,退出当前的测试流程,若静态测试失败,具体处理如下:
(1)车载信号主机输出紧急制动(EB);
(2)门控测试过程,输出开/关门指令执行完毕后,车载信号主机输出切除门使能,不再执行后续的测试;
(3)其他测试过程,停止当前测试,不再执行后续的测试。
4.2 FAM 模式开关位置异常
在自动唤醒不同阶段,当FAM 模式开关检测未在FAM 位时其处理策略如下:立即终止当前测试动作,VOBC 控制列车不移动,等待司机钥匙激活后进行手动唤醒流程或者再次将 FAM 模式开关恢复至FAM 位,再次进入自动唤醒流程。
4.3 测试异常
自动唤醒流程不同阶段测试项异常后的处理策略如下。
低压自检阶段主要包括2 个方面的自检,分别为车载信号设备自检和车辆设备自检。
(1)车载信号设备的自检。当速传、应容器传输模块(BTM)、网络、雷达等自检失败后,系统间隔一定时间后再自检1 次,若2 次都失败后,则判断上电自检失败,若第二次自检成功,则判断上电自检成功。
(2)车辆设备自检。系统自检失败或旁路开关在旁路位,则判断自检失败,当前系统自检失败后,后续系统不进行该项测试,测试结果显示未检查。
在高压自检阶段,高压自检测试是后续测试前提条件,若高压和风源测试异常,则判定本端测试失败并跳过本端后续所有测试项,切换到另外一端继续测试。
在静态测试阶段,当第一次测试失败后,立即发起再一次测试,若2 次测试均失败后,则判断静态测试失败,若第二次测试成功,则判断测试成功。
在动态测试阶段,跳跃接口的测试最多进行2 次。
5 测试结果影响分析
全列车上电后,列车各设备对自身状态进行自检,对影响行车安全、行车、乘客体验的系统进行分类分析,并给出建议,以提高列车的上线运营的能力,具体如表 2 所示。
6 结语
全自动驾驶系统有效减少工作人员及设备数量,降低运营和维护的成本,并通过唤醒设计及实现策略实现唤醒过程中各子系统协同联动,完全无须人工介入。同时根据各子系统对安全、行车、乘客体验的影响,约定唤醒成功的条件,提高唤醒成功率,减少唤醒所需的时间。在唤醒方式的设计上,不仅设置运行计划中列车的远程唤醒方式,同时配置人工唤醒方式,为车辆提供非预期事件发生时的应对策略。
全自动驾驶系统在提高系统的自动化程度、提升运营组织的快捷性、提高运营人员的效率等方面表现出极大的优势,唤醒技术的设计与实现策略更是最大程度的减少人工作业量,同时增强信号系统的可操作性,提升系统的智能化水平。
