无人机低空高光谱系统及应用研究
2023-12-27刘洪成叶发旺谭宏婕鲁纳川张川
刘洪成,叶发旺,谭宏婕,2,鲁纳川,张川
(1.核工业北京地质研究院 遥感信息与图像分析技术国家级重点实验室,北京 100029;2.中国地质大学(北京),北京 100083)
成像光谱仪基于谱段分光可以将被测目标光谱辐射值转换成光谱曲线,根据目标的辐射特性实现对地物目标的识别[1]。在地质勘查领域,由于岩石在红外波段范围内阳离子电子跃迁和阴离子团震动显示出诊断光谱特征,根据岩石的细致光谱信息可以揭示岩石矿物类型,从而有助于分析矿床成因及有关的地质信息,从而全面了解区域地质及蚀变带的空间分布,不仅可以满足地质普查和详查等不同空间尺度地质填图的要求,而且通过构建找矿预测模型还可实现对断裂构造、岩石类型和蚀变等控矿要素的有效识别[2-6]。
近年来,我国航空高光谱遥感技术获得了迅速发展,在识别与成矿密切相关的蚀变带、岩性和构造等成矿要素方面发挥了重要作用。孙雨[7]等用甘肃省敦煌市小金窝地区的CASI/SASI 航空高光谱数据建立了“整体谱形,特征参量协同”的蚀变矿物信息提取流程,成功提取了褐铁矿、绿帘石、绿泥石和云母等蚀变矿物。在新疆雪米斯坦地区,叶发旺等利用航空高光谱数据进行蚀变矿物填图[8-10],经过野外实地查证,矿物识别准确度较高。
目前应用于地质勘查的高光谱传感器体积和重量均偏大,只能搭载到有人飞机上,受到空域申请等因素制约,飞行成本高、灵活性差,机上操作过程繁琐,使得高光谱技术的推广和应用受到很大限制。近几年来,随着无人机技术的快速发展,低空高光谱遥感技术平台研发取得了很大进展,小型无人飞行器为矿产资源勘查提供了新的成熟平台支持,适用于无人机搭载的轻小型高光谱成像设备成为研究热点。目前,国内对于低空无人机高光谱遥感技术的研究局限于可见光-近红外波段,但是与地质勘查相关的矿物光谱特征均在短波红外波段[11]。本文重点介绍无人机载短波红外高光谱成像系统的研制过程,在新疆雪米斯坦地区开展了试验应用,取得了良好的应用效果。
1 轻小型短波红外成像光谱仪成像系统
1.1 短波红外成像光谱仪物镜光学设计
短波红外成像光谱仪光路结构如图1 所示,成像物镜采用透射式镜组结构,工作光谱范围介于1 000~2 500 nm 之间,短波红外波段区间采用像方远心设计。前置镜头部分包含光阑、望远物镜和狭缝三个组件。望远物镜属于短焦距、宽谱段和相对孔径较大的系统,需要校正包括球差、像散和色差等在内的七种像差。主要技术参数如表1 所示。

表1 成像物镜技术参数表Table 1 Technical parameter table of imaging objective lens
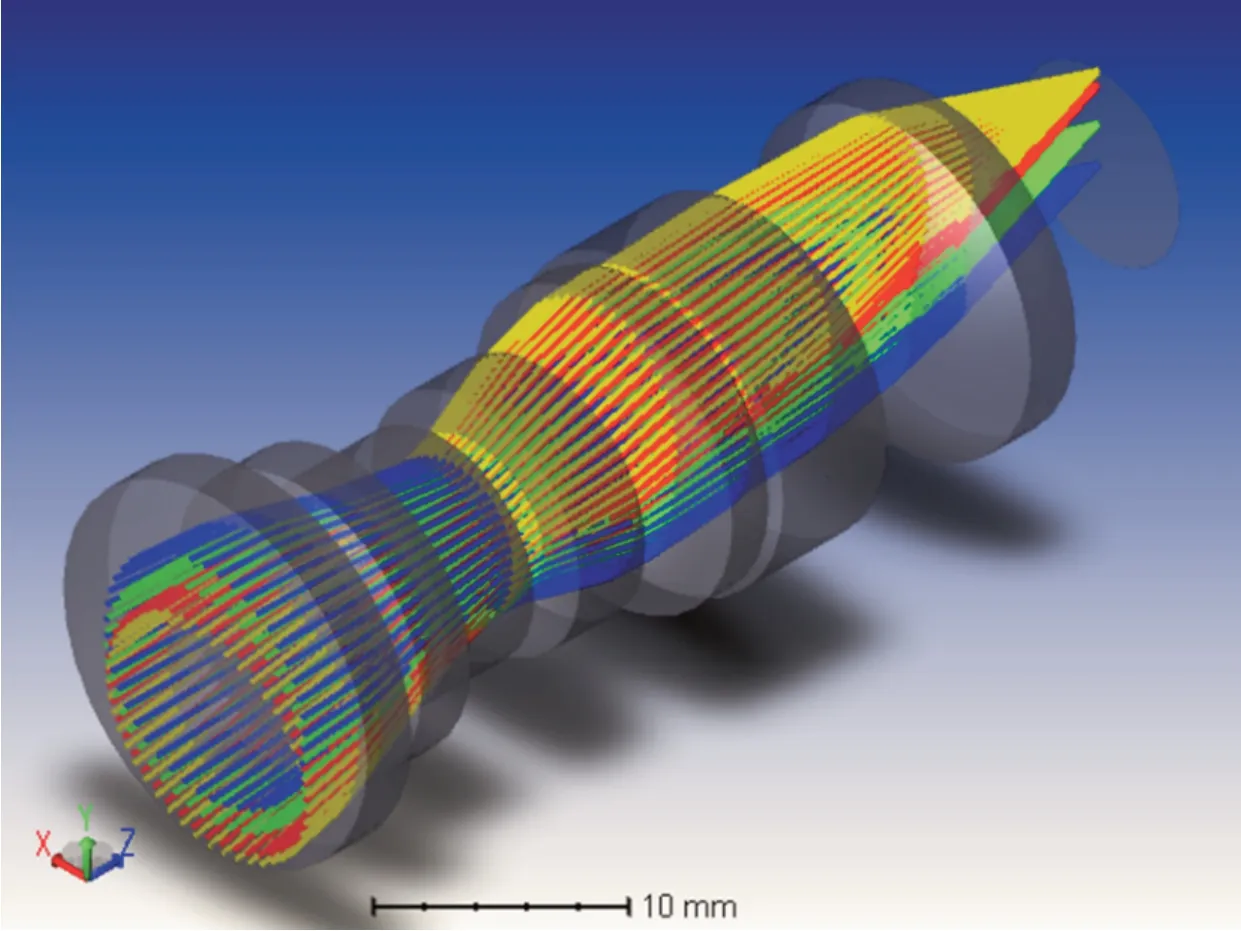
图1 成像物镜光学结构图Fig. 1 Optical structure diagram of imaging objective lens
1.2 短波红外成像光谱仪分光系统光学设计
无人机载重有限,短波红外成像光谱仪分光模块采用棱镜-光栅型分光组件,以实现系统轻小型化的目的。光路示意图如图2 所示,该设计通光效率高、机械结构体积小的特点,其独特的管状结构,保证了分光系统为同轴系统,有利于光校和系统的结构设计,主要技术参数如表2 所示。

表2 分光系统技术参数表Table 2 Technical parameter table of splitting module

图2 分光系统光路结构图Fig. 2 Splitting module of the optical system
系统在1 000~2 500 nm 波长区间的全局点列图如图3 所示,色散系统的谱线弯曲和非线性校正效果优秀。
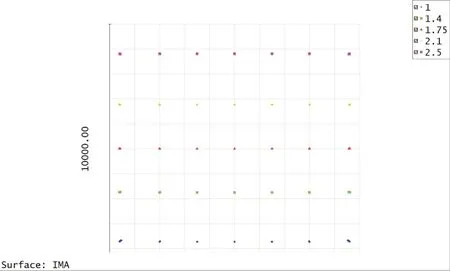
图3 分光系统全局点列图Fig. 3 The global spot diagram of the splitting optical system
系统在1.0、1.75 和2.5 μm 处的单色点列图如图4 所示,弥散斑RMS 半径均小于15 μm,满足小于光谱分辨率要求。

图4 分光系统单色点列图Fig. 4 The spot diagram of the splitting optical system
1.3 短波红外成像光谱仪系统装调
短波红外成像光谱仪装调测试过程是对光谱仪光学系统主要模组,包括:短波红外物镜、分光模块和红外焦平面阵列的关键性能指标进行测量和检验,以此为基础完成仪器光学系统装调,并开展整机的性能检测及光谱定标工作。
首先,对短波红外探测器的像元响应均匀性和盲元数量及位置进行测试,为仪器光谱定标工作提供基础数据支持。
其次,对成像物镜的焦距、视场角及焦面位置进行测量,为后续的系统装调工作提供基础。完成红外焦平面阵列、光谱成像模块和成像物镜间的安装及调整,通过调整各模块相对位置关系,保证像面位置准确,系统光谱维和空间维成像质量达到设计指标。
最后,通过测定色散图中光谱维坐标与色散波长绝对值间的对应关系,完成仪器波长位置的定标,测定仪器在工作波长范围内光谱响应曲线,完成辐射定标。
1.4 光学成像系统室内测试
采用蒙特卡罗法分析光学成像系统像元在各项光学元件制造和光机结构装调过程中的误差,分析结果表明:标准值和90 %统计值像元弥散斑半径均方根小于1/2 像元,短波红外成像光谱仪空间频率16.67 line/mm 处的MTF 值均高于0.85。
2 无人机低空高光谱系统集成
2.1 无人机低空高光谱系统组成
无人机低空高光谱系统集成采用供电电源、稳定平台等与固定翼垂直起降无人机的集成测试基础上,通过固定翼垂直起降无人机开展搭载电源、高精度惯导、智能飞行控制系统的飞行测试,无人机载高光谱成像仪系统组成及使用主要设备如图5 所示。
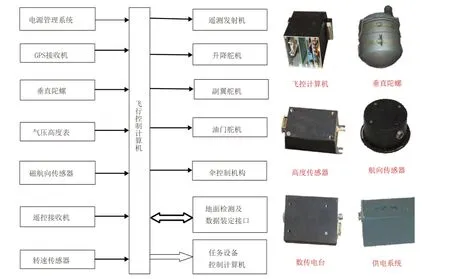
图5 无人机低空高光谱系统组成及使用主要设备Fig. 5 The system components and major equipment of UAV hyperspectral imager
2.2 无人机低空高光谱安装机械结构
为了避免无人机起降过程和发生意外情况下对设备的损伤,本次使用的CY20G 型无人机载荷仓采用内置设备放置方式,如图6 所示,光谱仪镜头部分置于载荷仓下面,高光谱成像仪则内置于固定在载荷仓的稳定平台上。稳定平台如图6 上图具备角度自动补偿功能,可以完成±5°范围的角度补偿。
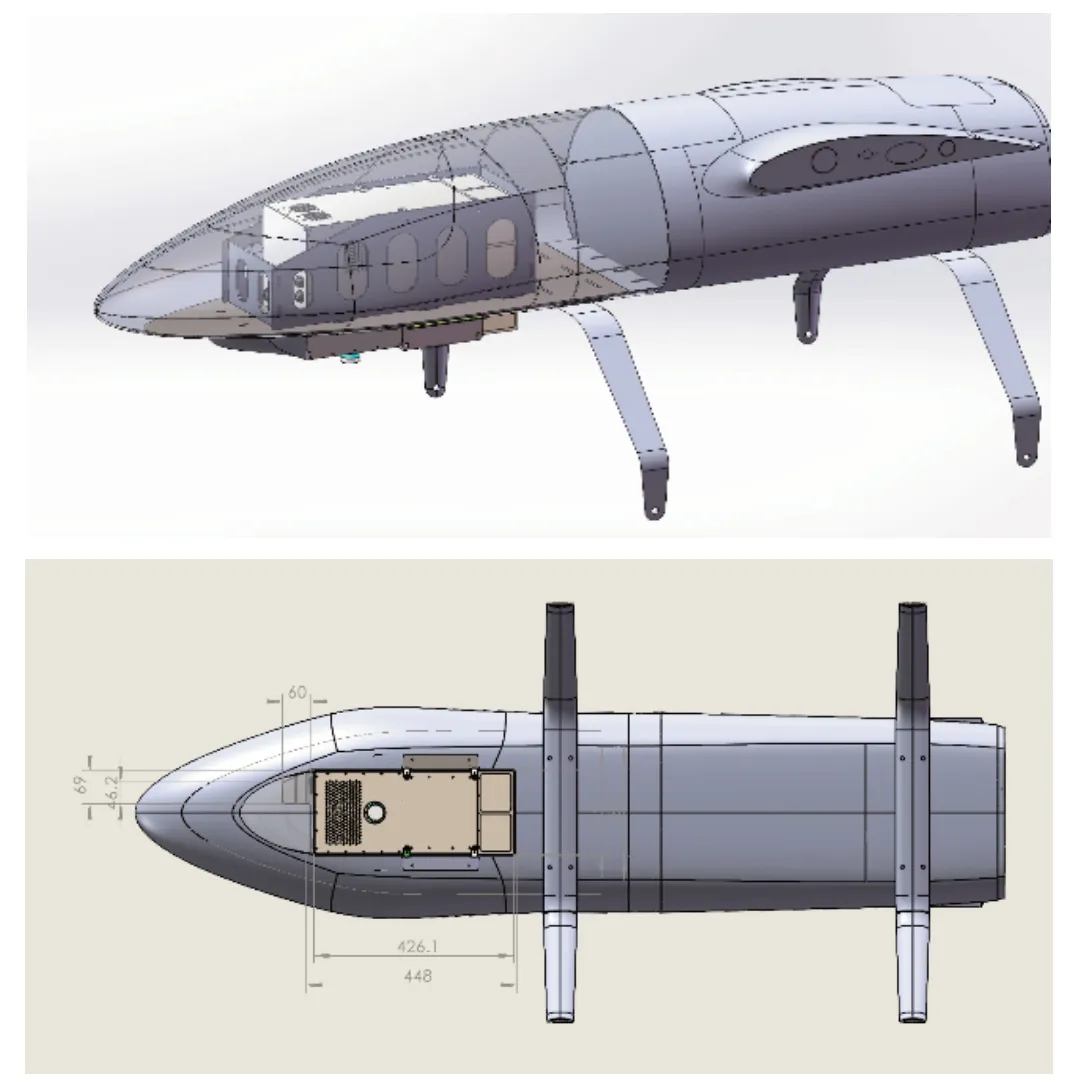
图6 无人机低空高光谱挂载示意图Fig. 6 Schematic diagram of UAV mounting
3 研究区地质概况
3.1 研究区选择
研究区及其邻区是我国重要火山岩成矿带,各种成矿地质要素(控矿构造、火山机构和热液蚀变等)较发育,铀(铍)及多金属成矿带找矿潜力大。主要发育一套以华力西中、晚期为主,由辉长岩、辉绿岩—闪长岩—二长花岗岩一正长花岗岩序列组成。以富碱、铝弱过饱和为特征的同熔型岩体为主体的侵入岩,晚期岩体为造山期后A 型花岗岩,常与晚石炭世—早二叠世潜火山岩体伴生[12]。研究区是一个以铀、铍为主,伴有钼等矿化的共生成矿带(图7)。
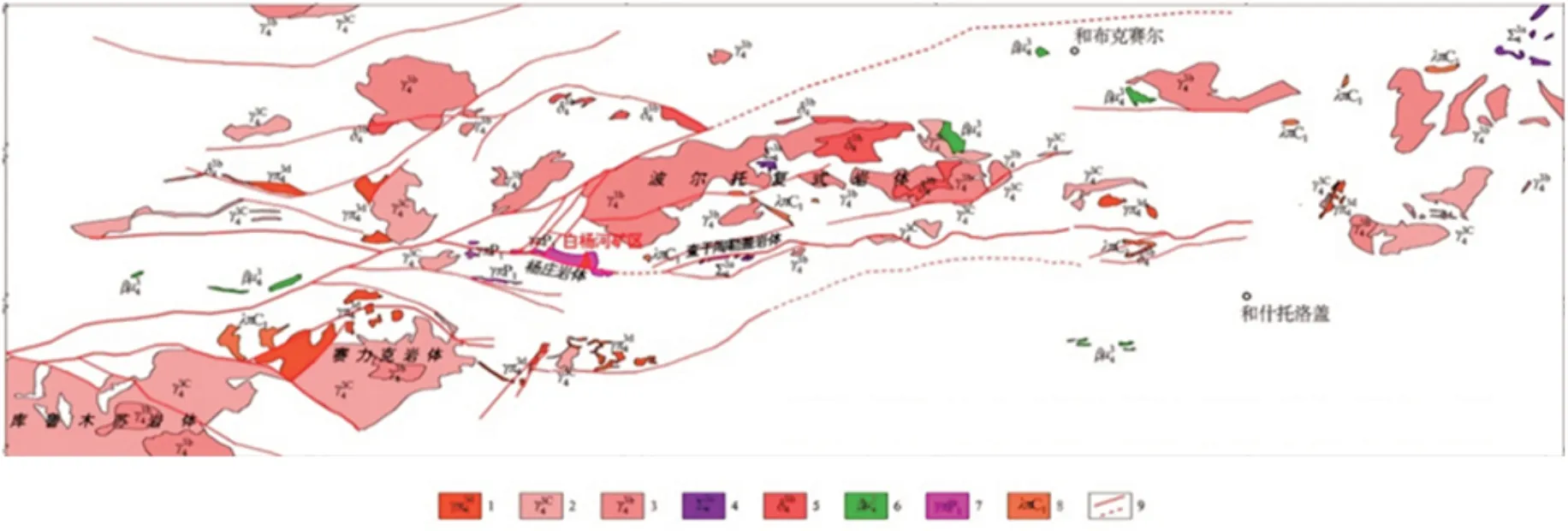
图7 雪米斯坦火山岩带侵入岩体分布图(底图据参考文献[12])Fig. 7 Geological sketch of the Xuemisitan volcanic belt(modified after reference[12])
3.2 研究区航空高光谱矿物填图
前人航空高光谱矿物填图结果如图8 所示,雪米斯坦地区及周围主要发育低铝绢云母、中铝绢云母、高铝绢云母、绿泥石/绿帘石和碳酸盐等多种蚀变矿物[13-15]。其中,高铝绢云母与中铝绢云母在空间上重叠较多,但中铝绢云母分布范围更广,这两种矿物主要分布在矿点的北侧及其北东部的较大范围;低铝绢云母与其他矿物重叠较少,主要分布在矿点的西南地区;在矿点东南部,可见碳酸盐与低铝绢云母重叠,周围发育绿帘石/绿泥石,它们总体均呈NE 向展布。雪米斯坦地区铀矿点空间分布在以低铝绢云母为主的西部与以中铝、高铝为主的东部的接触带的叠加地段。
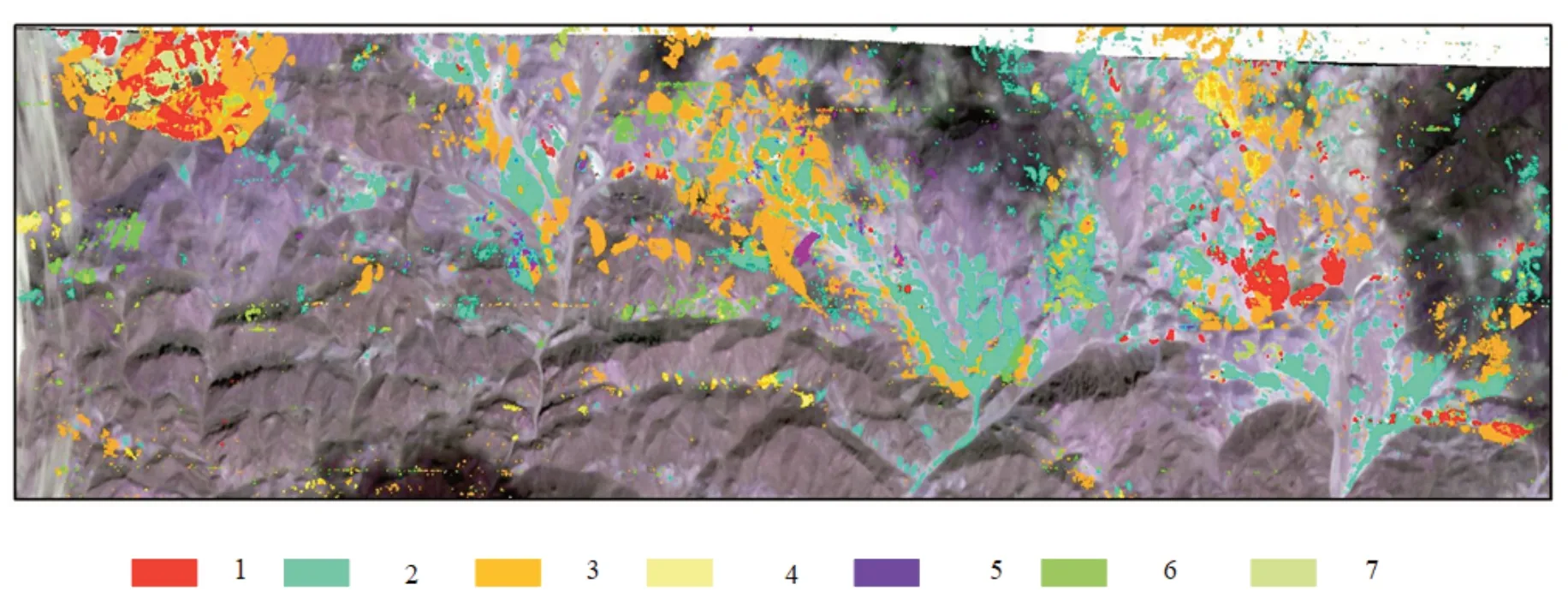
图8 新疆雪米斯坦地区航空高光谱矿物填图Fig. 8 Mineral mapping of airborne hyperspectral data in Xuemisitan area
4 无人机低空高光谱数据处理获取及处理
4.1 初始参数设置
高光谱成像仪需要配置的参数为积分时间和帧频,无人机需要配置的参数为飞行高度和飞行速度并规划航线。
高光谱成像仪帧频理论上可以自由设置,它与无人机飞行的速高比有关,如公式(1)所示:
式(1)中:v/h—速高比;IFov—瞬时视场角,毫弧度;f—高光谱成像仪帧频,Hz;ρ—重叠率,%。
无人机飞行高度与高光谱成像仪的空间分辨率和视场宽度紧密相关,如式(2)和(3)所示:
式(2)和(3)中:R—空间分辨率,mi;L—线视场宽度,行数;h—飞行高度,m;IFov—瞬时视场角,毫弧度;Fov—总视场角,毫弧度。
由于瞬时视场角和总视场角由镜头和高光谱成像仪参数决定,可认为是定值,那么飞行高度越高,空间分辨率越低,线视场越宽。因此,在能够保证空间分辨率满足要求的情况下,飞行高度越高越好。在确定飞行高度之后可以利用式(1)确定飞行速度。
无人机航迹规划时需要根据作业范围进行设计,航带之间保留一定的重叠率为后续航带拼接预留空间。飞行高度确定后线视场宽度可以确定,考虑重叠率后可以确定航带间距。
光谱仪拍照间隔与其总视场、重叠率和飞行高度、飞行速度有关,如式(4)所示:
式(4)中:T—拍照间隔,s;h—飞行高度,m;v—飞行速度,m·s-1;Fov—总视场角,毫弧度;ρ—重叠率,%。
4.2 飞行作业
基站布设在无建筑物遮挡、周围比较空旷的区域。定标场应分别选择物质成分单一、地形平坦、光谱特性差异较大且无交叉、面积不小于 10×10 个像元的两类地物作为明暗地物。
本文采用ASD 地面光谱仪,对设置的反射特性均匀、面积不小于 5×5 个像元的黑布、白布进行了同步光谱测量,用于后期的光谱重建计算,如图9 所示。

图9 飞行作业及定标黑白布布设实景图Fig. 9 Scene graph of flight operation and calibration target
4.3 光谱重建
采用基于“白布+均匀地物”的经验线性法对获取的无人机高光谱数据进行光谱重建,完成反射率的计算。光谱重建后定标黑白布光谱曲线和ASD 地面光谱仪实测黑白布光谱曲线对比图如图10 所示。典型特征吸收峰位置偏差为±2.0 nm,均小于光谱分辨率。

图10 光谱重建前后黑白布光谱曲线图Fig. 10 Reconstructed spectral curves after calibration with target
4.4 几何校正
无人机载成像光谱测量数据几何校正处理算法根据透视成像中物点-投影中心-像点之间共线条件方程,利用惯导精确测量成像瞬间透视中心的外方位元素,即探测器焦平面推扫单元中心的位置以及成像仪瞬间的姿态和位置信息,将惯导系统提供姿态数据经成像时间插值得到的每个线阵的姿态数据转换至内方位元素的姿态数据实现直接地理校正,从而校正像元的几何畸变,使其能够表达地表当时当地的真实地理几何信息。经过几何校正后检查点定位中误差检测记录如表3 所示,几何校正效果图如图11 所示,每个像元的空间分辨率为0.2 m,检查点中误差≤2个像元。
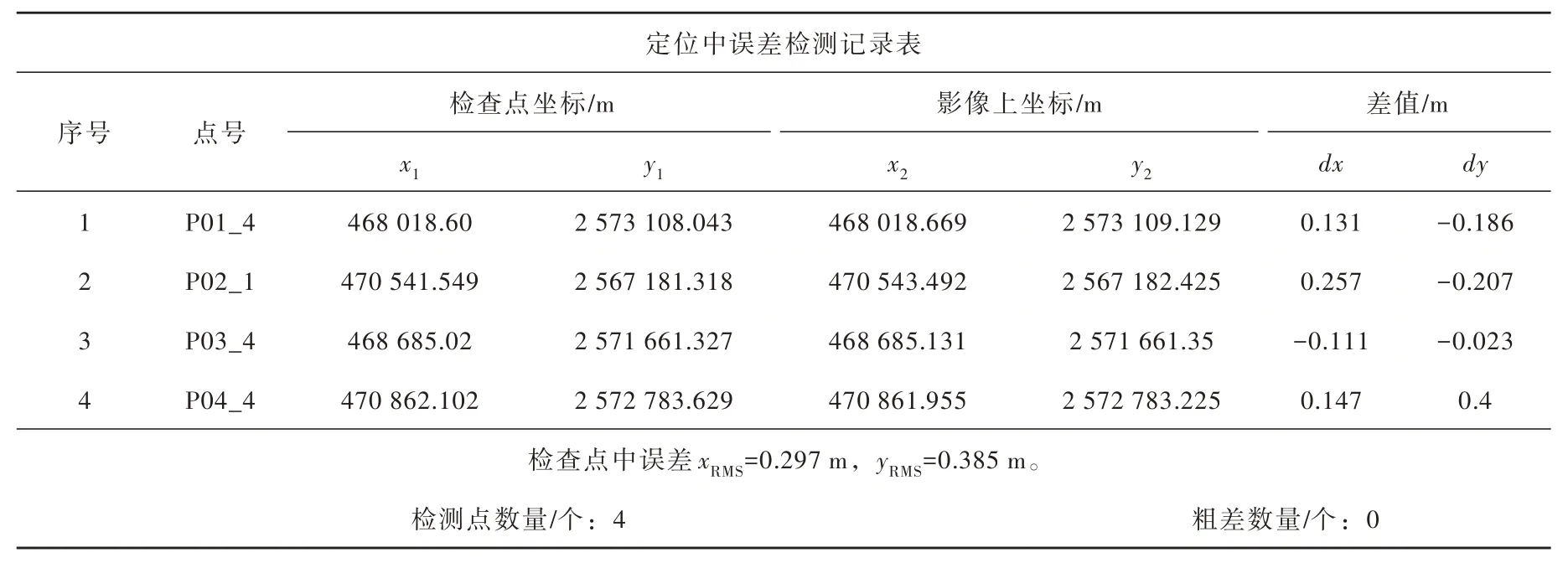
表3 几何校正中误差记录表Table 3 Error detection record table after geometric correction
5 矿物识别和填图
5.1 典型矿物光谱曲线特征
不同类型岩矿短波红外波段光谱特征曲线具有系列光谱特征,且光谱吸收峰位置和深度与岩矿物质组成有密切关系,例如:高岭石的诊断吸收特征位于2 165 和2 210 nm,在2 320 和2 350 nm 处也出现吸收特征。绿帘石主吸收峰位于2 250 nm,次吸收特征位于2 350 nm。碳酸盐类吸收特征位于2 300~2 340 nm 之间。根据不同矿物吸收位置的不同就可以对矿物进行分类。
5.2 端元波谱分析
基于短波红外影像像元光谱曲线与地面非成像光谱仪实际测量标准岩石样品的光谱曲线对比,计算像元光谱曲线和实测标准岩石样品光谱的相似性,识别主要诊断特征峰位置和组合,提取无人机高光谱影像中不同矿物的端元光谱,如图12 所示。

图12 典型矿物精细化识别端元光谱曲线Fig. 12 Fine identification image and corresponding spectral curve of typical minerals
5.3 矿物信息识别
矿物信息识别是将高光谱影像像元光谱曲线与实测标准矿物的光谱曲线作对比,从而提取矿物信息。比较航空高光谱SASI 矿物填图,无人机获取高光谱数据对于光谱特征相近,或地表发育规模较小的地物分类效果更好,矿物信息识别结果如图13 所示。
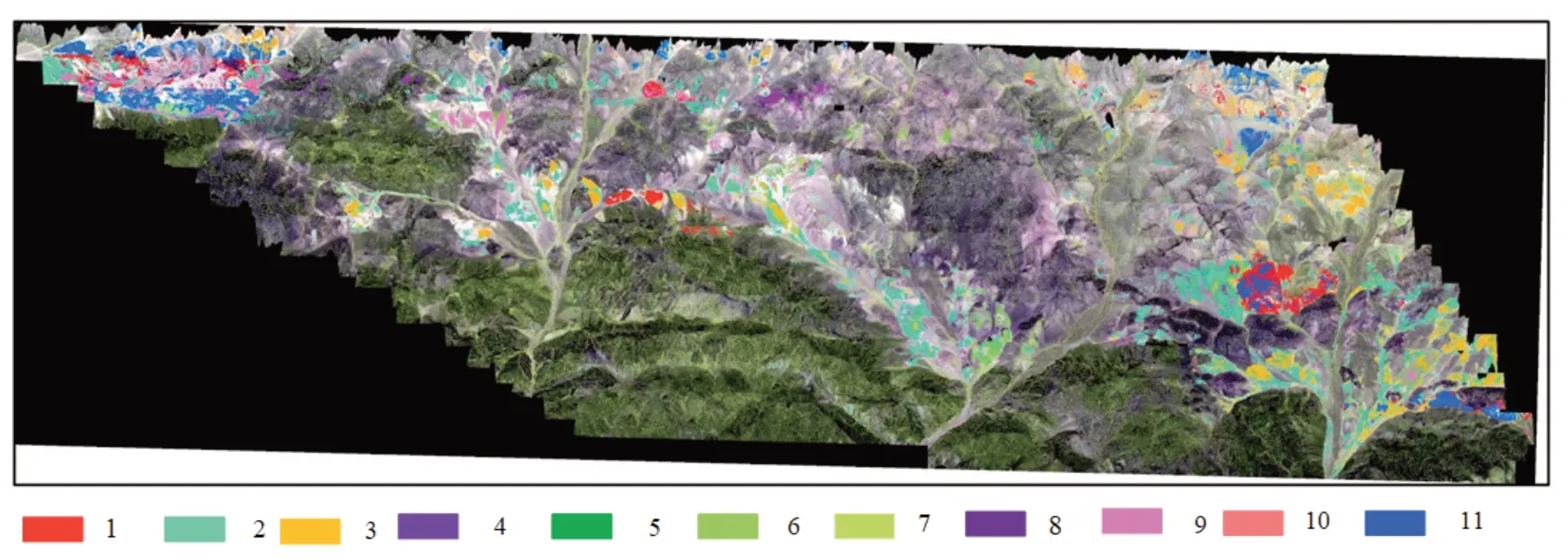
图13 典型矿物高光谱数据填图Fig. 13 Typical mineral mapping of hyperspectral data
6 结 论
1)利用透射式光栅研制短波红外光谱仪全视场弥散斑半径均方根均小于1/2 像元,利用单色仪在室内进行成像测试,MTF 值大于0.85,成像效果好。经过辐射校正后,在地面布设靶标,典型光谱特征吸收峰位置偏差为2.0 nm,均小于光谱分辨率。
2)无人机低空高光谱矿物填图与同一地区航空高光谱矿物填图结果进行对比,结果表明:两种高光谱数据提取的矿物在空间分布上一致性较好,无人机低空高光谱影像空间分辨率较高,不仅可以识别航空高光谱识别出的所有矿物,还可以识别出伊利石、明矾石等典型矿物,识别出的矿物种类更加丰富,且根据蚀变矿物特征吸收峰位置的细微差别,可以将一些矿物更进一步细分,从而实现围岩蚀变等成矿要素信息的精准、高效识别。
利用卫星和航空遥感技术实现大范围普查,再通过无人机低空高光谱实现详查,对于人迹罕至的找矿空白区、交通不便地区地质勘查工作具有重要的意义。无人机低空高光谱遥感技术可以为地质勘查提供更丰富的信息资源,是新形势下生态环境保护和铀资源勘查互融共生、互促共进的全新创新模式,值得大力推广到自然资源普查、生态环境监测和灾害应急监测等领域。
