美国对华技术出口管制视阈下中国机器人领域关键技术能力评价研究
2023-12-23张志娟朱保吉
何 潇,张志娟,李 波,朱保吉,高 卓
(中国科学技术信息研究所,北京 100038)
自2018 年以来,中美贸易摩擦不断升级,美国实行了更加严格的技术出口管制措施,加紧了对中国高技术产品出口的限制。2018 年11 月19 日,美国商务部的工业与安全局(Bureau of Industry and Security,BIS)面向公众征求意见,拟将14 项新兴与关键技术纳入商业管制清单(Commerce Control List,CCL),其中就涉及了机器人领域。同时中国国内部分关键核心技术缺乏自主创新能力,严重受制于人,需要依赖进口。在此背景下美国对中国展开的技术封锁,一定程度上造成了技术壁垒,导致中国出现诸多关键问题,亟待解决。
美国一直以来将出口管制制度作为其在相关领域确保自身优势地位、技术领先条件以及维护国家安全的重要手段,出口管制体系包含的商业管制清单中相关技术及参数一定程度上能够反映某领域全球关键技术发展前沿水平。有学者也曾提到商业管制清单中记载的技术是中国有待进一步发展突破的技术,可从商业管制清单中的相关信息及时了解并掌握中美技术差距[1-2]。本文从美国商业管制清单的相关管制技术信息入手,对中国关键技术能力进行分析,计算中美两国在机器人领域的关键技术能力差距值。《“十四五”机器人产业发展规划》中提到,机器人作为新兴技术的载体和产业转型升级的重要支撑设备,正在改变人类的生产和生活方式,为经济社会发展注入强劲动能。加快推进机器人产业高质量发展对于中国制造业发展意义重大。而中国机器人产业的一些关键技术及核心零部件等存在发展短板,受制于人,因此本文选择机器人领域进行研究,为中国机器人产业发展提供一定借鉴。
1 研究背景
当前关于美国对华技术出口管制的研究,多从出口管制的体系结构、制度和政策等较为宏观的方面进行定性分析,如彭爽等[3]对美国出口管制政策的演变与发展脉络进行了梳理,程晓光[4]对美国技术出口管制的法律体系、管理机构等方面进行了简要分析。此外,也有学者对具体的管制文件内容深入分析,如周磊等[5]对实体清单(Entity List,EL)中的信息进行挖掘并分析美方对华技术出口管制的战略意图,如陆天驰等[6]以人工智能领域为例,利用共现分析对商业管制清单中的出口管制分类编码体系(Export Control Classification Number,ECCN)进行描述性统计分析,明确管制关键词及重点领域,总体而言较为缺乏基于商业管制清单的具体产品、技术用途和具体技术参数应用于特定技术领域的深入分析。对于关键问题的研究,多从政策、产业和制度等较为宏观的角度提出突破路径及识别模型等,如陈劲等[7]构建了识别甄选关键技术的“金字塔”模型并提出了三重视角下关键技术的突破路径;汤志伟等[8]通过对关键技术的概念和内涵进行分析,得出关键技术的识别原则和识别方法,并以电子信息产业为例进行实证研究,最后从技术、企业、产业和社会4 个层面提出相关政策建议,但是缺乏对关键程度的审视与评估。
综上所述,专利视角下将商业管制清单的具体内容与关键技术结合路径的研究较少。因此,本文以受美国技术封锁较为严重的机器人领域为例,首先从美国对华技术管制的商业管制清单中提取机器人领域的相关管制信息;其次建立基于专利数据的技术能力评价指标体系,计算关键技术的技术能力值;最后分析关键技术受管制的程度,了解中国机器人领域技术发展状况。
2 机器人领域技术管制项目分析
为了明确美国对中国机器人领域的管制情况,首先需要确定美国的商业管制清单中有关机器人的管制内容。
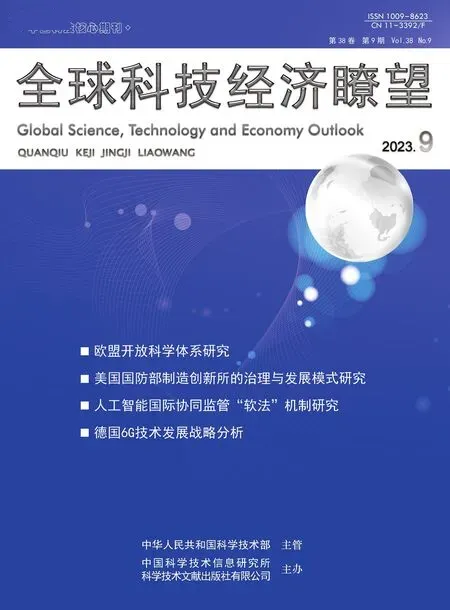
数据获取来源于美国商务部工业与安全局官网,通过2021 年更新的商业管制清单,提取清单中包含“robot”的管制项目内容,并通过对照受控国家列表(Commerce Country Chart,CCC),筛选出专门针对中国的相关管制技术,进行数据过滤、去噪后,得到涉及机器人的清单管制条目的具体信息见表1。
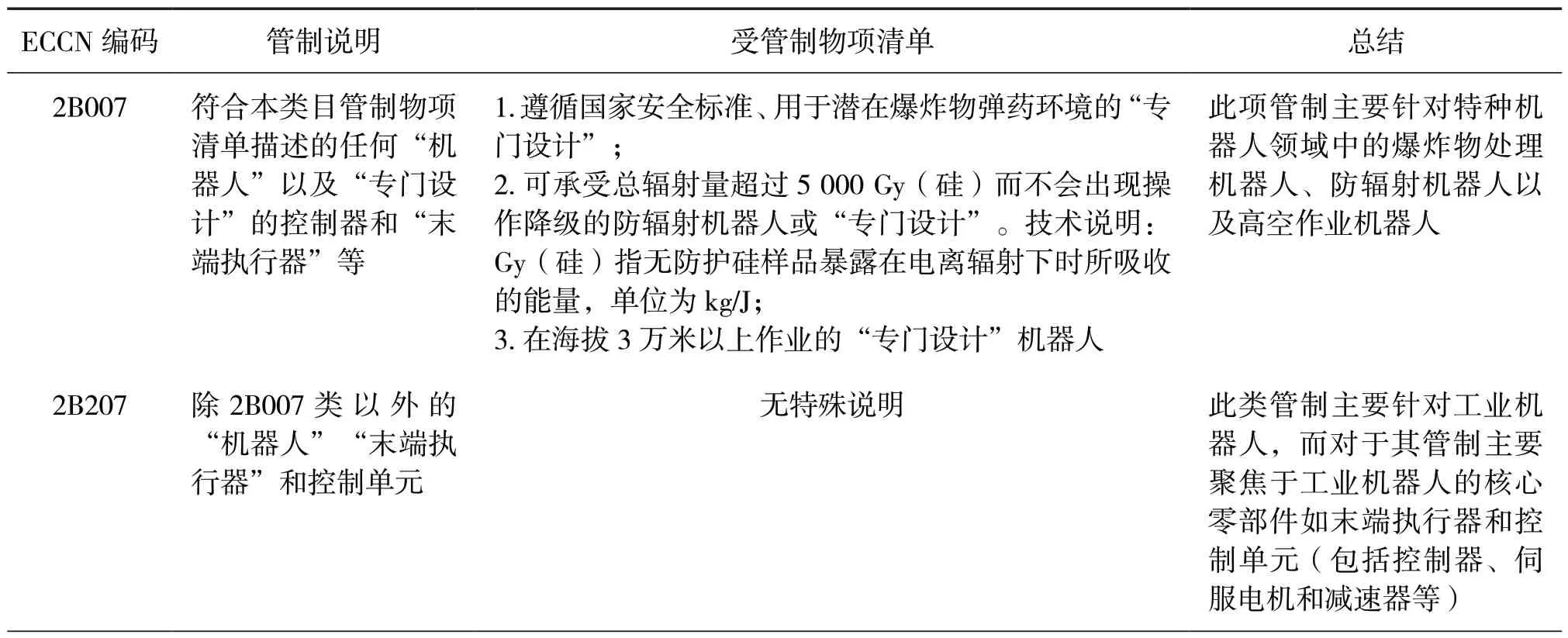
表1 美国商业管制清单中针对中国的涉及机器人的清单管制条目
除商业管制清单中的管制条目外,美国商务部工业与安全局于2018 年11 月19 日公开了一份拟进行管制的新兴/基础技术清单,包含14 类新兴技术,其中就涉及机器人领域的微型无人机和微型机器人系统、集群技术、自动装配机器人、分子机器人、机器人编译器和智能灰尘。列出的这几项新兴技术都是潜在的管制项目,一旦管制同样会造成针对中国的技术壁垒,因此也纳入本文研究范围。
综上所述,本文所研究的机器人领域具体管制内容如表2 所示,可分为两种类型,一是子领域机器人(自动装配机器人、水下工作机器人、微型机器人、排爆机器人、抗辐射机器人、高空作业机器人、微型无人机),二是核心零部件(末端执行器、传感器、控制器、伺服电机和减速器)。由此可见,美国对机器人的管制主要集中在特种机器人和工业机器人领域。值得注意的是,早在2018 年的美国商业管制清单中,就存在对于能够实时进行三维图像处理或三维场景分析的服务机器人的管制,但是此项技术管制自2019 年起被取消,这与中国在机器人视觉三维成像技术方面取得的技术突破有一定关联。
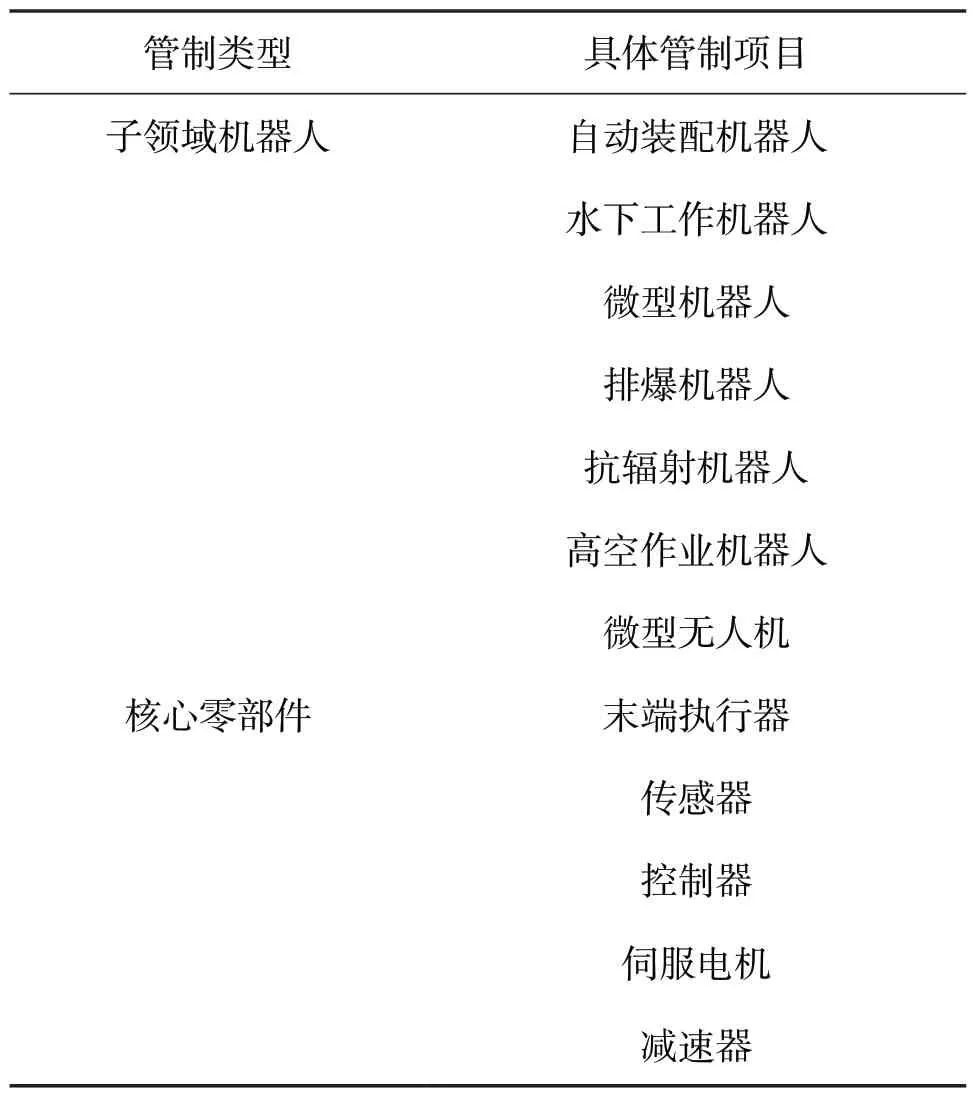
表2 机器人领域具体管制内容
3 中国机器人领域关键技术能力评估
专利信息是某国家或某领域的自主创新能力的直接体现。本文利用专利数据进行中国机器人领域受管制技术的关键技术能力值的评价分析。通过对受管制技术的专利信息的挖掘和分析,构建基于专利指标的技术能力评价指标体系,计算中国机器人领域受管制技术的关键技术能力得分。
3.1 构建基于专利的技术能力评价指标体系
指标体系的构建要遵循目的性原则、全面性原则和可行性原则,本文在秉承以上原则的同时,结合相关领域权威学者的研究成果以及关键技术能力的特点,从专利数量和专利质量两个方面构建以下评价指标体系。
3.1.1 专利数量指标
首先选取衡量专利数量的指标,专利数量指标可以依据各国累计的专利数量直观反映某国家的技术创新能力。本文选择专利申请数量及专利增长率作为专利数量指标。
一是专利申请数量,在一定程度上可以反映技术研发的概况。本文的专利申请数量即为子领域机器人和核心零部件各项管制项目的专利申请量。
二是专利增长率,指专利的数量随时间变化的百分率。本文的专利增长率用子领域机器人和核心零部件各项管制项目的专利申请数量的年均增长率百分比表示,计算公式如下。
其中,B为末年的专利申请数量,A为首年的专利申请数量,n=总年数-1。
3.1.2 专利质量指标
专利数量指标是在数量层面对专利指标进行衡量,而专利的质量也是至关重要的,因此在实际专利统计分析过程中,要将专利数量指标与专利质量指标有机结合起来,得到更具参考价值的分析结果[9]。通过查阅相关文献,本文选取3 个专利质量指标进行分析。
一是专利被引次数,是基于被引的专利质量评价指标,即某项专利被其他专利所引用的次数。本文的专利被引次数即为子领域机器人和核心零部件各项管制项目的被引次数计量。
二是发明专利所占比例,是衡量专利质量的另一项重要指标。本文的发明专利所占比例是指子领域机器人和核心零部件各项管制项目的发明专利数量占其所有专利数量的百分比,计算公式如下。
三是科学强度(Science Strength,SS),是基于引用的专利质量评价指标,该指标所反映的是分析对象的专利技术与最新科技发展、科学研究的总体关联程度及水平。本文研究的科学强度通过参考科学文献的数量进行计量。
基于以上分析,构建出关键技术能力评价指标体系(见图1)。一级指标包括专利数量和专利质量,二级指标包括专利申请数量、专利增长率、专利被引次数、发明专利所占比例和科学强度。
图1 技术能力评价指标体系
3.2 数据来源及处理
基于以上从美国对华商业管制清单中提取的相关管制项目,本文以德温特(Derwent Innovations Index,DII)专利数据库作为数据来源,通过查阅相关文献、行业报告等资料,确定相关术语关键词,包括对关键词的同义词、上位词、下位词和缩写式等不同表达方式的扩展,构建专利检索式,各管制项目的专利检索式及检索结果如表3 所示,分别将检索条件限制申请国为“CN”及“US”,检索时间范围为2012 年1 月1 日至2022 年1 月1 日,得到中国及美国的相关技术的专利指标。
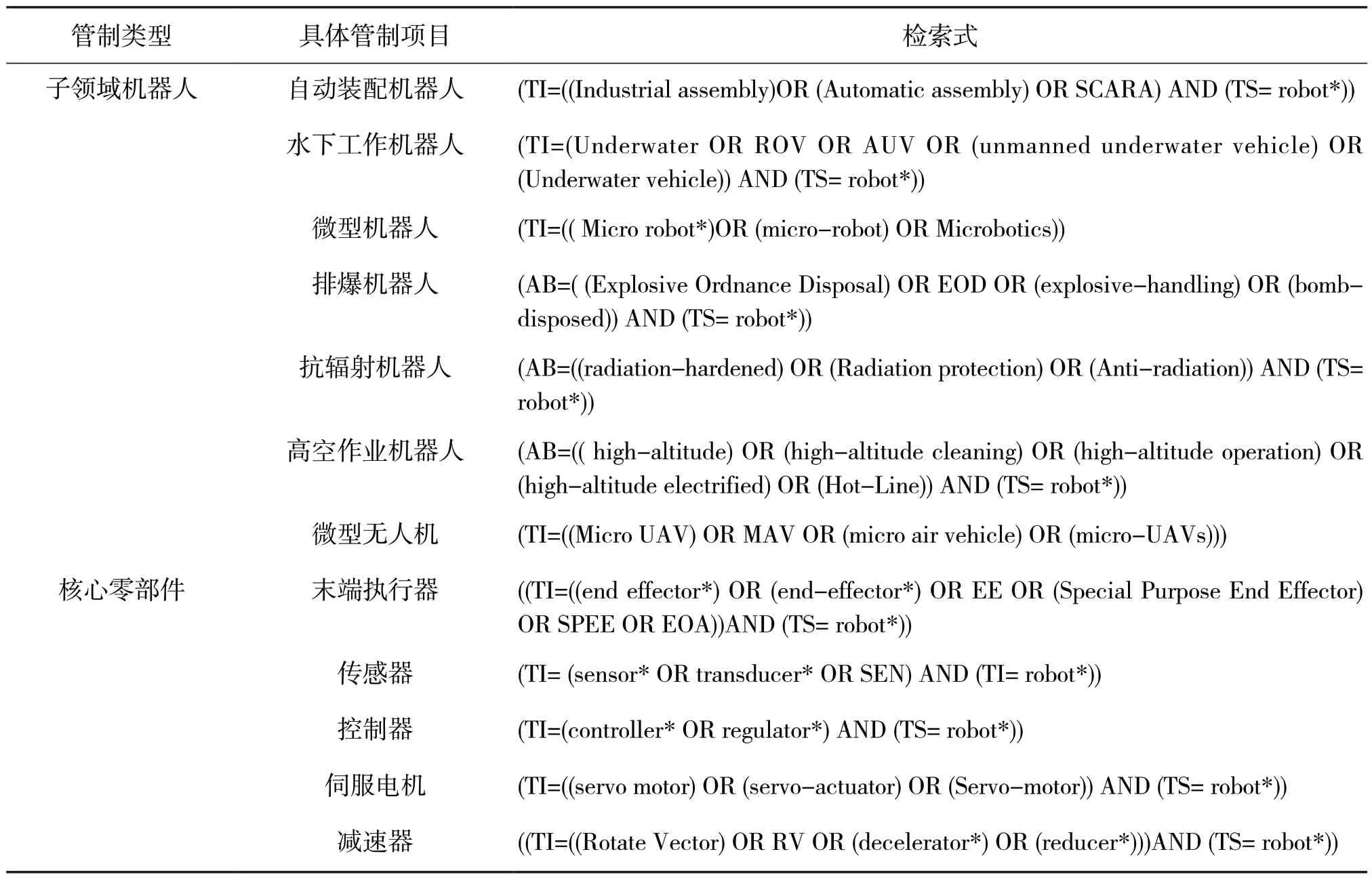
表3 受管制技术专利检索式及检索结果
3.3 机器人领域关键技术能力评价分析
3.3.1 技术能力评价值
熵值法是一种客观赋权方法,主要通过计算各个指标的信息熵值,然后根据各指标的相对变化程度及自身信息量的大小确定指标的权重[10]。因此本文基于以上中美两国专利数据,采用熵值法进行指标的权重赋值并分别对两国的技术能力评价值进行计算,并用美国技术能力值减去中国技术能力值代表两国的技术能力差距值,明确各项技术的差距。其中子领域机器人和核心零部件两部分进行独立计算并排名,具体评分结果如表4 所示。
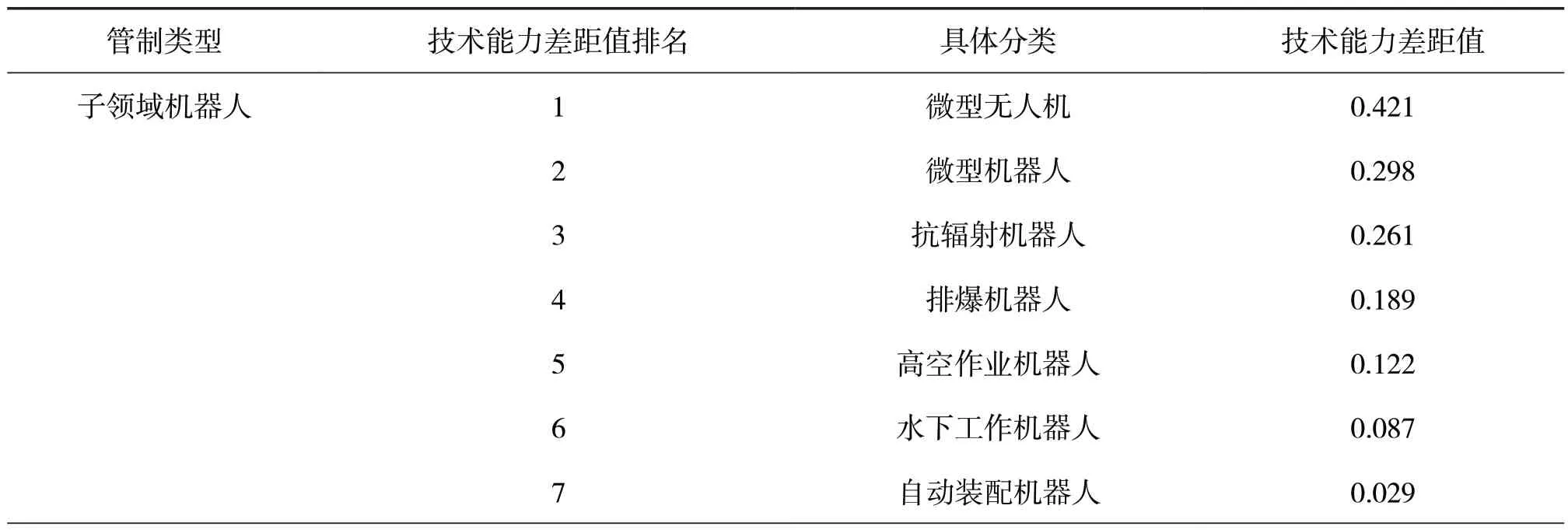
表4 机器人领域受管制技术能力差距值
受到管制的子领域机器人中关键技术能力值差距最大的是微型无人机,关键技术能力值差距最小的是自动装配机器人,表明中国自动装配机器人发展形势较好;受到管制的核心零部件中关键技术能力值差距最大的是减速器,发展形势严峻,关键技术能力值差距最小的是末端执行器,技术能力值甚至反超美国。
3.3.2 关键技术能力综合评价分析
技术能力值差距最低的是自动装配机器人,属于工业机器人范畴,是柔性自动化装配系统的核心设备。根据中国电子学会发布的《2021 年中国机器人产业发展报告》,中国工业机器人所占市场份额为53%,而特种器人所占市场份额仅为11%,差距悬殊的市场份额在一定程度上也导致了自动装配机器人的技术能力得分高于其他子领域机器人[11]。国际机器人联合会发布的《2020 年世界机器人报告》显示,2020 年有71%的工业机器人部署在了亚洲,其中中国的安装量增长了20%,出货量为168 400 台,这是有记录以来单个国家的最高数值[12]。虽然数量出彩,但是中国的工业机器人在精度、可靠性和稳定性等方面难以与国际顶尖标准水平相匹敌,仍存在一些核心关键零部件有待研发。
自动装配机器人还未正式进入美国对华商业管制清单,但是位于美国拟管制的14 项新兴与关键技术之列,并且自动装配机器人的部分核心零部件如控制器、传感器和末端执行器已遭管制,因此应在保持竞争优势的基础上加强精度的提升,以防未来被管制而阻碍产业发展。通过专利分析,发现中国自动装配机器人的IPC 分类号主要集中在B25J(机械手)、B23K(焊接)、B65G(运输或贮存装置),可以看出中国在自动装配机器人的技术集中于机器人的本体研发设计。中国电子学会发布的《中国机器人产业发展报告(2021 年)》中提到,随着智能时代的到来,机器人的发展趋势不再是局限于本体的灵活性和自动化,而更多的技术创新应该围绕安全的人机协同、人工智能和物联网等重点方向展开[11]。对于中国工业机器人的控制器、传感器等受管制的现状,应多关注工业机器人的智能化发展。
剩余的子领域机器人均属于特种机器人,相较于工业机器人,特种机器人的工作环境和作业条件要求更为复杂,因此特种机器人的技术攻克主要集中于其自身结构、控制单元、自身防护及环境兼容性。中国在国家863 计划支持下,已在水下机器人、微操作机器人和管道机器人等方面已开展相关研究,取得了一定的研究成果,这也是水下机器人和微型机器人的技术能力得分高于其他种类的特种机器人的一大原因[13]。虽然中国特种机器人发展较早,但是未形成产业规模,自主创新成果少,总体上与技术发达国家还有一定差距。
首先,对于商业管制清单中明确列出受管制的水下工作机器人、高空作业机器人、排爆机器人和抗辐射机器人进行分析。中国水下机器人发展较早,具备一定的研究基础,技术能力得分差距较小。水下机器人的全球专利申请数量排名前3 位的专利权人分别为哈尔滨工程大学、沈阳自动化研究所和浙江大学,均为中国的研究机构,可见中国在水下机器人方面取得了一定的研究成果。2018 年,“海星6000”机器人是中国首台自主研制成功的6 000 m 级有缆遥控水下机器人装备,已在多个海域获取了环境样品和数据资料,然而日本早于1993 年就已研发成功工作水深为11 000 m 的深海无人潜器“海沟号”[14],结合美国对中国水下机器人的传感器方面的管制,其与国外领先机构在探测水平、导航定位等方面仍存在较大的技术差距,未来要加大力度开展水下机器人的关键技术如动力驱动技术、通信与导航技术以及控制技术的研究。高空作业机器人、排爆机器人和抗辐射机器人技术能力差距值相当,这3 类特种机器人在中国的研究起步都比较晚,缺乏自主研究基础。排爆机器人、高空作业机器人和抗辐射机器人都是应用于高危环境下的处理设备,中国与国外先进研究发展的差距主要是对于环境的耐受及识别应急程度,即使有部分研究成果,也因为技术精度不足而缺乏可靠性,从而遭到了美国的相应管制,未来的发展中应注重环境适应性、智能程度以及发展形态等方面的发展。
其次,被美国列入拟管制技术但还未进入商业管制清单的微型机器人和微型无人机。由技术能力差距值可以看出,中国的微型机器人和微型无人机与美国的差距最大,尤其是微型无人机,技术能力差距值高达0.421。中国在国家自然科学基金、863计划等的资助下,高等院校和科研院所针对微型机器人和微操作系统进行了研究,并分别研制了原理样机[15]。微型机器人的应用领域越来越广泛,逐渐延伸至医疗等领域。作为潜在的被管制对象,中国应加大研发力度,在微机器人应用系统中逐步使用能实现大输出力矩、高运动精度和强行进能力等运动特性的新型驱动系统。微型无人机的技术能力差距值在子领域机器人中最高。微型无人机应用于军事领域最早由美国提出,随着技术的发展,一些民用微型无人机也相继问世。目前美国是微型无人机领域技术最为先进的国家,微型无人机的全球专利申请量排名前30 位的主要申请人中有21 家美国机构,占比为70%,涉及WING 航空公司、威罗门飞行公司、波音、霍尼韦尔、高通等大企业。中国仅有两家机构上榜,分别是大疆公司和北京航空航天大学。对比中美两国微型无人机的技术布局,发现美国的技术集中在G06F(电数字数据处理)、H04W(无线通信网络)、H04L(数字信息的传输)、G06N(基于特定计算模型的计算机系统),技术重点在于计算机的控制系统以及电通信技术;而中国的技术布局则集中在B64C(飞机、直升机)、B64D(用于与飞机配合或装到飞机上的设备)、G05D(非电变量的控制或调节系统)、G01S(无线电定向、无线电导航),技术重点偏向于装置设计及无线电控制系统,可见中国与美国在微型无人机方面的主要差距在于高精度导航控制和通信系统。
最后,关于工业机器人的核心零部件,如末端执行器、传感器、控制器和减速器等。减速器和伺服电机的技术能力差距值最大,其中减速器的差距尤为突出。核心零部件占工业机器人总成本的72%,其中减速器占36%[16]。减速器有谐波减速器和旋转矢量减速器两种,目前中国的谐波减速器可以实现国产化,但是旋转矢量减速器的80%市场份额依赖进口。伺服电机虽与国外差距逐年缩小,部分实现国产化,但在精度、速度和性能方面仍存在不足。控制器差距值略高于末端执行器,相对而言,控制器是中国与国外技术差距最小的领域,但依然受到高精度及高性能方面的管制;中国的机器人传感器存在精度不够、性能不高等问题,应提高对环境的判别能力。而末端执行器的技术能力差距值最低为-0.034,甚至反超美国,这是因为中国工业机器人的专利主要是集中在机器人的本体设计,多围绕夹具、机械臂关节等技术分支进行专利布局,技术相对成熟,应在保持现有优势的基础上继续实现技术创新,避免受到商业管制的影响。
4 结论与建议
4.1 研究结论
由上述分析结果可以得到以下3 点结论:(1)美国对于中国机器人领域的管制项目主要集中在子领域机器人和核心零部件两个方面,其中子领域机器人中,受管制的是工业机器人和特种机器人两种。(2)关键技术能力值差距最小的是工业机器人领域的自动装配机器人。特种机器人领域的水下工作机器人、高空作业机器人、排爆机器人、抗辐射机器人、微型机器人和微型无人机技术能力差距值依次增加,其中微型无人机关键技术能力差距值最大。(3)核心零部件层面,首先末端执行器得益于中国专利对于机器人本体设计的专利布局,其关键技术能力差距值最小,甚至反超美国;其次控制器和传感器的相关关键技术,存在精度和性能的缺陷;而工业机器人的核心零部件伺服电机和减速器的技术能力差距值都较高,技术差距较大。
4.2 发展建议
第一,完善机器人产业政策,为机器人产业发展提供支持。通过聚焦国家战略和产业需求,明确机器人产业发展的薄弱环节及目标定位,加强机器人领域的关键核心技术攻关支持力度,如加强设立机器人产业基金、组建机器人创新联合体、加快培养机器人产业创新人才等举措的政策布局,发挥政策的合理引导与精准扶持优势。合理优化配置要素资源,构建科技、产业、金融、人才和知识产权等方面的政策协调机制,积极给予资金支持,形成政产学研用深度融合的强大优势。
第二,关注工业机器人智能化发展,保持机器人产业竞争力。对于中国机器人领域相对优势的技术,应结合当前国内外发展前沿的研发热点,对相关技术进行更新迭代,保持在相关技术领域的竞争力,发挥先发优势。当前机器人的全球发展趋势越来越偏向于安全的人机协同、人工智能和物联网等重点方向,而非先前的仅局限于本体的灵活性和自动化的技术。在工业机器人智能化的全球趋势下,中国应多关注具备优势的自动装配机器人的智能化发展,深度结合机器学习、深度学习和人工智能等技术,培养工业机器人具备更加智能的感知、决策和执行能力以及更加精准的定位和导航能力,实现符合未来发展趋势的人机协同生产、精细化生产等。
第三,加强特种机器人的环境耐受及识别应激性能。特种机器人在军事领域尤其是高危环境中的应用是十分必要的,因此应大力拓展机器人的应用领域,加强对于特种机器人的技术攻关,提升特种机器人的环境耐受及识别应急性能,推动机器人系统集成商专注细分领域特定场景和生产工艺。中国与美国在微型无人机方面的主要差距在于高精度导航控制和通信系统,对于环境耐受及识别应激的要求都非常之高,因此未来中国应加强此方面的技术攻关。
第四,提升机器人领域核心零部件的精度、速度等关键性能。由于中国机器人产业起步较晚,因此伺服电机、减速器等核心零部件与国外在精度、速度和性能方面存在较大差距。如减速器中的旋转矢量减速器严重依赖进口,未来应着重提升旋转矢量减速器的相关技术水平,加强核心零部件及核心技术的攻关和提升产业的自主创新能力,提高机器人核心零部件的功能、性能和可靠性;伺服电机虽已部分实现国产化,但在精度、速度和性能方面仍有待提升,未来中国应重点关注伺服电机的精度、性能提升。