基于流体力学原理的扫地机器人自动倒垃圾系统
2023-12-22谢文皓成思杰谢蕤宇
谢文皓,成思杰,谢蕤宇
(上海高仙机器人深圳研发部,广东 深圳 518000)
0 引言
扫地机器人自动倒垃圾系统在现代生活中具有重要意义。随着人们生活水平的提高和生活节奏的加快,自动化设备的需求逐渐增加。扫地机器人[1]作为智能家居的一部分,已经在家庭和工作环境中得到广泛应用。然而,传统的扫地机器人需要人工定期清空尘盒。塞满垃圾的尘盒容易把手弄脏,也难以一次性倒干净,尘盒中的海帕积攒的毛发、灰尘也不易清理,容易堵塞扫地机风道,使扫地机无法持续性正常使用。如图1 所示,常规扫地机器人会搭配一个集尘基站[2]来实现扫地机自动清理垃圾,扫地机启动以后,就回到集尘基站并自动对接,将尘盒中的垃圾自动吸入集尘基站,实现自动清理垃圾的问题。然而,图1 产品的系统仍然存在一些局限性。首先,扫地机尘盒中的垃圾无法彻底清理干净,仍需要手动清理,甚至需要定期水洗才能清理顽固垃圾。其次,若垃圾中存在毛发等,排出时,极易缠绕和堵塞风道。基于此,以满足用户的需求,本研究是对自动倒垃圾系统进行改进,并提高其性能和可持续性。主要研究目标是应用流休力学原理开发一种高效且智能的扫地机器人自动倒垃圾系统,提高自动倒垃圾系统的性能,提高扫地机器人自动处理效率的问题,以提高用户的使用便捷性。

图1 常规扫地机器人自动倒垃圾系统原理图
1 流体力学原理在自动倒垃圾系统中的应用
1.1 伯努利原理与应用
伯努利原理[3]是由瑞士科学家丹尼尔·伯努利于18 世纪提出。伯努利原理是流体力学中的基本原理,它描述了在不可压缩流体中沿流线的速度和压力之间的关系。它基于一个基本概念,即在不可压缩流体[4]中,当速度增加时,压力降低,反之亦然。这个原理可以表达为:
其中,P代表压力,ρ代表密度,v代表流体的速度,g代表重力加速度,h代表流体的高度。由于在一个流体风道中c值是恒定的,对于高度变化不大的扫地机风道的流体来说,ρ、g、h都是近似不变的,流体速度v增加会导致流体压力p降低,从而产生压力差推动垃圾运动。
依据伯努利原理,倒垃圾是否干净,关键在于出尘口附近风速v出是否足够大,出尘口的气压P出是否足够小。当(P-P出)*S截>fmax时,就能推动灰尘进入出尘口,进入到基站内,如图2 所示。其中,P代表灰尘颗粒其他方向的气压;P出为出尘口的气压;S截为灰尘颗粒截面积;fmax为灰尘颗粒的最大静摩擦力。所以,出尘口附近的风速越大,倒垃圾就会越干净。

图2 出尘口附近气压减小后可以推动灰尘移动
1.2 旋风吹尘技术的原理与应用
自动倒垃圾系统中的旋风吹尘技术是一项关键的创新,它利用流体力学原理实现了高效的垃圾清理和倒垃圾过程。这项技术的基本原理是在尘盒侧面增加一个小侧门,在倒垃圾时形成一个旋风,将尘盒内的垃圾卷起并排放到集尘基站中。如图3 所示,各部位具体使用原理如下:

图3 旋风吹尘尘盒原理图
集尘基站启动后,基站的风机会向外界排风,将基站的尘桶、扫地机的尘盒空气排出,形成负压。小侧门打开形成旋风,尘盒内气压小于外界大气压P,所以尘盒的小侧门就会由于压力差打开,外界空气通过小侧门高速进入尘盒,导致尘盒底部的空气流速急剧增加,高速气流冲击圆形尘盒壁后形成旋风。
根据伯努利原理,当流体速度增加时,压力降低。因此,尘盒底部的旋风是尘盒内压力最低的区域,而其它区域气压较高,这就产生了一个压力差,将尘盒内的垃圾吸入了旋风之中。特别是尘盒死角中的顽固垃圾和可能存在的堵塞物质,如毛发,都能卷起。之后,垃圾将排放到集尘基站,卷起的垃圾随着旋风的运动被送到尘盒的出尘口附近。由于出尘口截面积小,风速高,气压低,垃圾被低气压吸出后进入对接好的集尘基站,最后完成了垃圾的倒出和清理过程。
这个过程高效而迅速,自动清理垃圾的频率仅需每天一次,垃圾排出更干净彻底。该系统也更好的解决毛发等特殊垃圾难以排出的问题,有效避免了垃圾堆积和堵塞。
2 自动倒垃圾系统的设计及实验测试
2.1 基站密封结构设计
在自动倒垃圾系统中,扫地机需要将尘盒内的垃圾倒入集尘基站,因此应提高出风口附近风速,确保风道密封良好,以防止垃圾被空气逆流或泄漏出来。密封设计的关键在于扫地机与基站的对接部分。为了实现密封,我们在扫地机的出尘口和集尘基站的对接口6 上安装密封套3。密封套3 设计成薄壁梯形,由硅胶材料制成,以提供足够的弹力,能够在扫地机对接稍有偏移时也能形成有效的密封,防止空气和垃圾外泄。此外,我们还在基站上设计了扫地机前轮导向槽4 和后轮导向槽1,以确保扫地机在驶上基站平台5 后,通过对轮子的导向限位,对接时能够准确对准基站对接口6。为防止扫地机驶上基站平台5 时,前轮压坏密封套3,在密封套中部设计了防压块2,具体设计如图4 所示。

图4 基站密封套和轮子导向槽的设计
2.2 扫地机旋风吹尘尘盒设计
2.2.1 尘盒小侧门的设计
尘盒小侧门的形状、小大、位置都影响着尘盒内旋风的风速,决定了垃圾是否能倒干净。根据流体力学原理,小侧门的截面积大小直接影响着风速。因此,测试过程中需要仔细考虑小侧门的形状和截面积,并通过三维CAD 设计[5]进行结构设计和手板验证。实验表明,小侧门开启后的形状应该是一种能够加速气流的近似喇叭形,外侧大,内侧小。这种形状有助于减小流体的阻力,从而提高风速,倒垃圾最干净。小侧门的位置应该设计在尘盒的侧面偏底部,以确保气流能够顺利进入后,沿着尘盒底部内壁旋转。一方面能减小能量损失,另一方面也能让气流冲击到尘盒底部的所有死角,将死角顽固垃圾都卷起。改良后的扫地机如图5 所示。

图5 集尘基站改良密封后的扫地机
2.2.2 尘盒内壁的设计
尘盒内壁的设计对于小旋风的形成有着一定的重要性,要提高小旋风的风速,加强小旋风卷起垃圾的效率。首先,尘盒内壁应该设计成光滑的近似圆柱形,使得侧门进入的高速气流能在内壁的导向下形成旋风。同时避免旋风路径上出现尖角、死角,以减小气流啸叫声,防止垃圾缠绕堆积。
3 实验
3.1 出尘口风速与倒垃圾效果实验
为了研究出尘口风速与倒垃圾效果的关系,使用一款配有旋风吹尘尘盒的扫地机,分别匹配两种不同的集尘基站依次测试。设定1#基站是原型,2#基站在1#基站的基础上,提高了扫地机出尘口的风速。
首先,将扫地机尘盒内放入20 g 垃圾,让扫地机与1#基站对接,测试了1#基站的吸收垃圾的效果,并记录,使用下述关系可反映集尘基站回收率来衡量倒垃圾的效果。
然后,使用风速仪对扫地机出尘口附近的风速进行了测试,记录风速值。
最后,换成2#基站来对接扫地机,重复以上测试,最终结果见表1。

表1 不同出尘口风速的倒垃圾效果对比
通过测试发现,2#基站风速更大,集尘基站回收率高,倒垃圾效果更好。当风速增加时,较高的风速能够更有效地推动垃圾。风速继续增加至侧门开启后,能形成旋风,将尘盒死角的垃圾全部卷起,送到倒尘口,进入基站。
3.2 基站密封结构倒垃圾效果实验
为了进一步增加出尘口风速,减少在倒垃圾过程中空气泄漏,我们要对基站对接口进行了密封,增加了密封套,设计了相关实验研究。本次测试重点加强了扫地机出尘口与集尘基站的对接口的密封设计。1#基站对接口为原型机,不使用密封套,2#基站对接口使用硅胶密封套。2 种基站均使用同款风机排风,其它的结构均一致。测试时,使用同一个扫地机,依次对接2 款基站进行测试,测试结果见表2。

表2 增加硅胶套密封前后的倒垃圾效果对比
实验结果表明,使用同款风机,采用硅胶密封套的2#基站的密封性能更好,风量明显更大,2#基站出尘口风速为32 m/s,也高于1#基站16 m/s。依据之前的实验结果,出尘口风速越高,倒垃圾效果越好。所以,硅胶密封套的2#基站倒垃圾效果好于1#基站。
3.3 旋风吹尘尘盒倒垃圾效果实验
为了进一步验证旋风吹尘尘盒对倒垃圾效果的提升,分别使用普通尘盒和旋风吹尘尘盒进行自动倒垃圾实验。本次测试使用扫地机分别安装普通尘盒和旋风吹尘尘盒,尘盒内放入20 g 的毛发、猫粮、黄豆,让扫地机对接集尘基站,使用基站最大档位,自动倒垃圾30 s 后,查看尘盒内垃圾是否倒干净,记录集尘基站回收率,结果见表3。
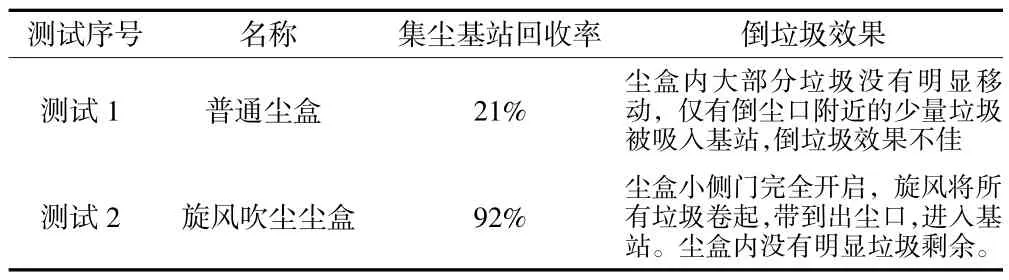
表3 换用旋风吹尘尘盒后的倒垃圾效果对比
如图6 所示,测试2 使用旋风吹尘尘盒回收率为92%,远高于普通尘盒。说明旋风吹尘技术能加速尘盒内风速,形成小旋风,能将尘盒内的垃圾倒干净。
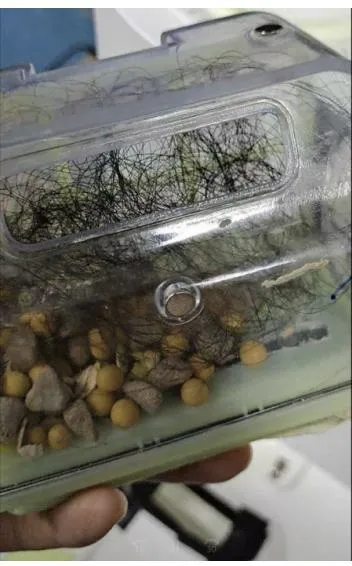
图6 旋风吹尘尘盒放入毛发、猫粮、黄豆
4 结语
经过各项测试研究了流体力学原理在自动倒垃圾系统中的应用,用实验证明了风速越大气压越小,能加速垃圾移动。通过加强基站密封,增加出尘口风速,能够更好地推动垃圾进入出尘口和基站。同时,还应用了旋风吹尘技术,通过产生旋风将尘盒四周死角的垃圾卷起,进一步提高了顽固垃圾清理的效率,为自动倒垃圾系统的性能提供了创新的解决方案。