基于均值-方差理论的多阶段公交走廊设计
2023-12-21江欣国范英飞
夏 亮 ,江欣国 ,范英飞
(1.西南交通大学交通运输与物流学院,四川 成都 611756;2.西南交通大学综合交通运输智能化国家地方联合工程实验室,四川 成都 610031;3.太原科技大学交通与物流学院,山西 太原 030024;4.长沙市望城区交通运输局,湖南 长沙 410203)
随着城市范围的急剧扩张以及城市经济的快速发展,城市出行需求快速增长,随之而来的城市交通拥堵问题也开始加剧.为缓解急速增长的出行需求与缓慢扩张的路网通行能力之间的矛盾,城市管理者在增加公交线网覆盖率的同时,也在努力提高公共交通服务水平,促使使用低乘坐率小汽车出行的居民改用高乘客率的公共交通出行.
在公交服务的优化中,许多研究已将一些实质性的现实世界细节明确地纳入其模型,例如不同的车队构成(如电动车和内燃车)、多种运营方案(如全停和跃站停靠)以及站点位置的地理限制[1-4].然而,现有的大多数模型都建立在固定的公交线路上.现实中有些公交系统(例如地铁)由于其高昂的建设成本,在规划阶段就需要考虑到远期需求的变化[5-6].因此,传统的优化方法(公交线一次性建设完全线并投入使用)无法适用于这种需要兼顾远期需求变化的公交线设计.
多阶段设计在轨道交通建设中比较常见,例如成都地铁、上海轨道交通和深圳地铁的线路,都至少分两期完成全线建设,时间跨度在十年左右.多阶段设计方法包括向两端延伸线路和线路内增设站点2 种方式,本文主要研究第1 种方式.针对公交系统多阶段设计,已有研究者作了相关研究.Matisziw等[7]提出在已有轨道路线不满足需求时如何延伸线路的方法;Cheng 等[8]提出一个将预定轨道交通线最佳细分为多个部分以进行分期建设的模型;Sun等[9]通过双层规划方法提出一个轨道交通线多阶段设计的模型.虽然上述模型都被应用到预定的轨道交通线路中,即给出一些预设车站的位置,并着重于解决何时延伸以及被延长公交线路分期实施问题,然而,忽略此时的公交站点选址优化问题.因此,Xia 等[10]提出解决上述问题的一种方法,但其仍假设出行需求是固定变化的,忽略了出行需求的随机特性.
随机优化和鲁棒性优化是2 种研究随机需求对公交系统影响的方法.前者旨在获得公交系统或乘客的最低期望成本[11-14],后者是最小化与不满足系统服务情况相关的成本[15-16].大多数研究人员倾向于使用随机优化方法[12,14,17],而忽略随机因素影响下方案的鲁棒性问题.Amiripour 等[18]根据不同季节需求的波动,为鲁棒性网络设计提出一种基于期望系统成本的模型;An 等[15]研究了随机需求下固定线路和“拨号叫车”的多方式服务优化问题,并构建一个基于糟糕情况下的成本最小化非线性模型;Hassannayebi 等[11]通过引入过载情况下的惩罚成本,提出随机需求下列车时刻表优化模型;魏长钦等[19]以最大服务率和最小动态行程为目标,提出定制公交的站点及路径优化方法.这些研究通常着重于追求目标函数(如系统成本)期望值的最优化,而忽略目标值的波动问题.
系统成本的方差是衡量系统鲁棒性能的重要属性,因此,同时考虑系统成本的均值和方差的优化方法更有利于决策者得到随机需求影响下的理想方案.均值-方差(MV)理论在公交系统设计的应用方面,Yan 等[20]提出一个鲁棒性的优化模型,用于固定公交路线的时间表设计,旨在最小化随机时刻表偏差的期望值及其波动的加权总和;Huang 等[14]通过将乘客的出行时间、运营成本的期望值以及运营成本的方差线性加权成目标函数,并将其降至最低来优化发车时刻表.上述相关研究虽然使用MV 理论保障了方案在随机需求下的稳定性,但仍存在一些局限性:其求解过程由于利用离散模型而复杂;大多数研究都集中在发车频率或时刻表的优化上,而忽略了站点位置优化问题.
本文基于文献[10],利用MV 理论构建随机增长需求下的多阶段公交走廊设计决策方法.主要贡献如下:1)构建多种风险态度下的决策模型,以表达不同投资者在随机增长需求下的不同决策态度;2)提出适用于随机需求下的多阶段公交系统优化模型,以优化不同时期的站点布局和发车间隔;3)使用连续近似方法将离散问题连续化,可将求解结果表达为解析解,简化求解过程.最后,本文使用不同的设计策略(公交线路全覆盖、单阶段、多阶段设计)和分析决策态度分析模型效果.
1 公交走廊布局
本文假设公交走廊布局如图1 所示.为提供日常通勤服务,公交车辆往返于CBD 与公交线路的边界,lt≤Lt(lt、Lt分别为t时段的公交线路边界、居民分布边界),t为年度.公交车辆在每个车站停下来接送乘客.在t=0,1,···,T,t∈T 期间,住户人口沿着CBD 和边界Lt的走廊连续分布,其中 T 是计划周期时间段的集合.假设出行需求是由住户的通勤行为决定的,住户往返于其住所和预定的就业地点(即本文中的CBD).在规划期间,假设走廊的总住户数Nt以每年gt的速度增长,gt为随机变量,服从特定概率分布.假设公交线路的长度可随住户向外扩张而延伸,考虑到需求的增加和走廊的延伸,公交运营商会寻求优化公交系统的设计,以更好地满足出行需求.

图1 单中心公交走廊Fig.1 Layout of monocentric corridor
2 模型构建
2.1 目标函数
为融入方差对决策结果的影响,使用MV 函数(式(1))作为目标函数,随机需求下多阶段公交走廊设计模型可表示为式(1)~(5).
式中:ρ(x) 为站点分布密度(公交站点位置可由站点密度函数积分得到[4,21,22]);ht为发车间隔;E(Z)、D(Z) 分别为 Z 的期望、方差,Z 为所有标准化系统成本Z的集合;τe为线路延伸范围内的最小公交站点数(本文中取1);是t时段处于中心的总乘客数的期望值;CV为车辆的载客量(乘客/车);κ为高峰小时期间每小时出行需求占全天的比例.
式(2)为公交线路长度约束,防止公交线缩短;式(3)为线路延伸长度最短约束,避免公交线路延伸范围内无公交站点;式(4)为车容量约束;式(5)为非负约束.
2.2 风险态度决策方法
根据风险态度定义3 种决策者:中立风险、规避风险和寻求风险.众所周知,具有不同风险态度的决策者会对同一问题做出不同的决策.针对不同风险态度的公交系统设计问题,可以采用效用理论方法或MV 方法.本文中的“风险态度”是指在MV 框架下对风险的态度.因此,中立风险的决策者漠视收益的波动,规避风险的决策者将尝试使收益的方差最小化,而寻求风险的决策者将尝试使收益的方差最大化.如果通过成本期望值量化收益,并通过成本方差量化收益的不确定性水平,则可以通过MV 函数来表达决策者的风险态度,具体描述如下:
1)中立风险决策
该类决策者对收益不确定性“中立”且漠不关心,其满意度只取决于预期的系统成本.因此,其MV 函数为
2)规避风险决策
该类决策者保守且不享有任何系统成本不确定性的决策者,其满意度随着系统成本和其不确定性的增加而降低,其MV 函数表示为
式中:ξ 为方差的影响因子.
3)寻求风险决策
这类决策者是赌徒,享受系统成本不确定性带来的兴奋.随着系统成本的增加,其满意度会降低,而随着系统成本的不确定性的增加,其满意度则会增加.这类风险决策态度的MV 函数为
上述对风险决策的描述方法源自文献[23].综合3 种风险决策态度,MV 函数可表示为
式中:ζ 为决策分析态度;ζ=0,表示中立风险决策;ζ=1,表示规避风险决策;ζ=-1,表示寻求风险决策.
2.3 公交系统成本
系统成本Z是乘客在规划范围内各阶段t的通勤成本 Γt和公交运营商的成本 Λt的总和,并将其标准化为每户的日均时间成本,即
式中:µ 为时间价值;Tw为每年工作时间.
1)用户成本
在时间段t中的任何一天,通勤者都从其居住地x乘公交出行,其旅行时间用 φt(x) 表示.φt(x) 由三部分组成:乘客前往最近公交站点的走行时间At(x)、在公交站的等待时间Wt(x) 和从站点到目的地的在车时间It(x),如式(11)所示.
为建立简约模型,应用连续近似法求解.
步骤1假设到站点的走行时间At(x) 是走行距离d(x) 除以步行速度vw,即d(x)/vw.如果乘客住在公交线所覆盖的范围内(即x≤lt),则其走行距离近似定义为2 个连续站点之间距离的1/4[4,10,24],即1/(4ρ(x)) ;否则,需要增加从其居住位置x到公交线路边界的距离,即x-lt+1/(4ρ(lt)) .
步骤2乘客在车站的等候时间Wt(x) 近似为发车间隔时间的一半[20-21].
因此,时间段t的年度通勤总成本 Γt与年度通勤次数和单次通勤成本有关,表示为
式中:λt(x) 为日出行需求密度,是住户密度nt(x)(具体见2.4 节)和每户日均出行量 η(假设为给定的)的乘积,即 λt(x)=ηnt(x) .
2)运营商成本
公交运营商的成本取决于4 个指标[26]:公交线的长度 Λ1(t)、公交站点数量 Λ2(t)、每辆车行驶的距离 Λ3(t)、公交车辆的行驶时间 Λ4(t) .
式中:Tr为公交每天运营时长.
式(13)中的“2”表示2 个运行方向;式(14)表示公交2 个运行方向共享一个站点;式(15)中,Λ1(t)/ht表示1 h 内出发的所有车辆的行驶里程;式(16)车辆行驶时间由巡航速度行驶的时间和由于停车而延迟时间所构成.
因此,公交商运营成本为
式中:πi是与 Λi相关的单位成本.
2.4 住户分布模型
当住户总数已知时,居民以特定分布函数在走廊中,且其需满足总住户数平衡条件,即
3 求解方法
该问题假定确定了满足住宅分布模型的解,即住户密度和走廊的大小已知,通过式(1)求解公交系统优化模型.利用局部分解法和最优化理论[10,21]可得
式中:ltmin为由公交线路延长约束式(3)确定的最短公交线路长度;为没有公交线路延长约束式(3)的目标函数式(1)的最优解,可以通过求解其斜率为0 的位置来获得,且满足式(26)所示关系.
4 数值分析
首先,假设户数Nt=Nt-1+gt,初始住户数为N0,用户数增长率gt∈{ga,gb},其中,,gb=对应的概率分别为分别为gt的期望、偏差.然后,以轨道交通为例,分析住户均匀分布下(住户分布密度为k),3 种设计策略和3 种风险决策态度对轨道公交系统的优化参数和各成本情况的影响(所提模型适用于任何公交方式).3 种设计策略分别为:1)全覆盖设计,也就是公交线路全覆盖居民分布走廊,令lt=Lt;2)单阶段设计,即在开始时修建的公交线路在之后所有阶段都使用,并不发生变化(可由本文所提模型简化得到);3)多阶段设计,即本文所提模型.最后,表1 列出了模型的参数值[25-27].

表1 实验中的参数值Tab.1 Value of parameters in experiment
4.1 公交线路全覆盖设计
公交线路全覆盖设计是最常见的公交线路设计策略.表2 为公交线路全覆盖设计结果,表中,括号中两数值分别为初始和最终的公交线路/走廊长度,余表同.图2 为3 种风险决策态度公交线路全覆盖设计中各阶段的发车间隔.

表2 公交线路全覆盖设计结果Tab.2 Result of transit system with full-covered design
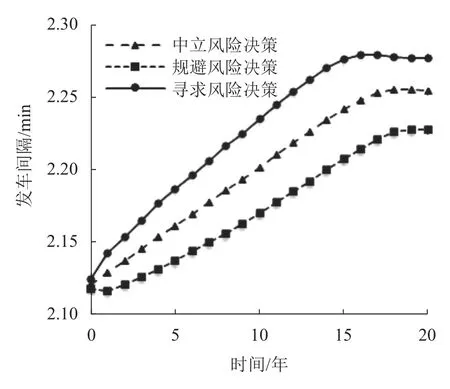
图2 公交线路全覆盖设计的发车间隔Fig.2 Headways of transit system with full-covered design
与中立风险决策态度的结果相比,规避风险态度决策者通过提供更优质的公交服务(更小的发车间隔和更密集的站点分布),降低用户通勤成本(约0.17%),从而得到更稳定的收益方案(即系统成本的波动降低了约4.16%).在这种情况下,尽管更优质的公交服务增加了运营商成本(约0.38%),但系统成本仅增加0.06%,这相对于降低的系统成本标准差而言,是可接受的.对于寻求风险态度,其结果相反.该结论说明所提出的模型在3 种风险决策态度下对公交线路全覆盖设计都具有良好的效果.此外,在3 种风险决策态度中,随着住户数增加,发车间隔都随之增加(见图2).这是因为在公交线路随住户分布延伸的同时,为避免运营商成本的过度增加,延长的公交线路限制了公交系统其他参数性能的提升,即发车间隔.
4.2 公交线路单阶段设计
公交线路单阶段设计内容包括公交线路长度、站点分布和发车间隔.这意味公交线路并不一定全覆盖范围居民分布范围.表3 和图3 为3 种风险决策态度公交线路单阶段设计的结果.

表3 公交线路单阶段设计结果Tab.3 Result of transit system with once-and-done design
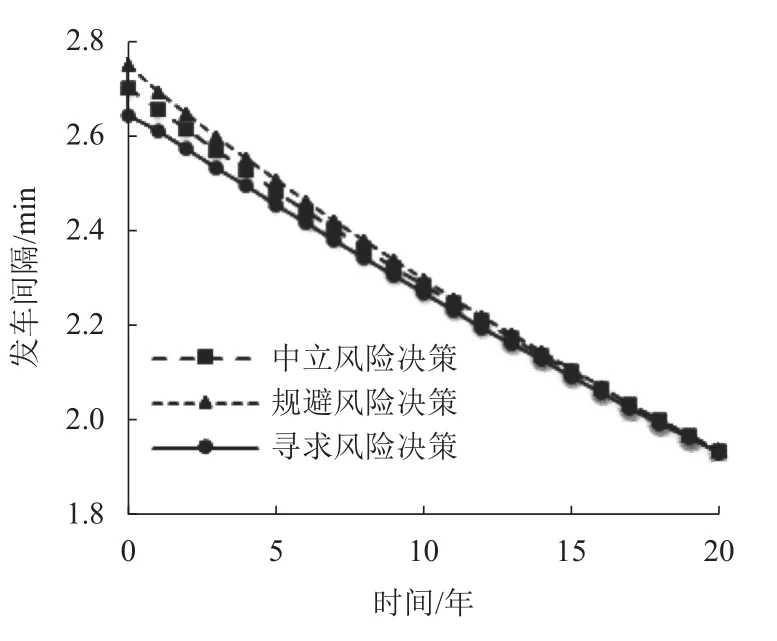
图3 公交线路单阶段设计的发车间隔Fig.3 Headways with once-and-done design
从表3 可得,公交线路单阶段设计中,与中立风险风险决策态度对比,规避风险态度提高12.37%的系统成本稳定性,寻求风险方式降低了15.89%.虽然规避风险方式仍然能获得更稳定的系统成本(表3 最后一列),但其主要原因不再是更低发车间隔和更密集站点分布,而是更长的公交线路(3.92%).由于规避风险决策提供更长的公交线路,缩短了公交线路覆盖范围外住户的通勤时间,从而降低了波动.这暗示最佳的公交线路长度也受风险决策态度的影响.此外,为降低因公交线路长度增加而上涨的运营成本,公交系统发车间隔有所增加,平均站点密度有所降低,与全覆盖设计方案相反.该结论验证了所提模型对公交线路单阶段设计的有效性,并表明其作用机理与全覆盖设计有所差异.与全覆盖设计类似,单阶段设计中,相较于中立风险决策,规避风险决策也会降低居民通勤成本,增加运营商成本,并导致系统成本及其稳定性增加.
与全覆盖设计相比,公交线路单阶段设计的系统成本虽然更低,但其波动更大.这种现象是合理的,因为其固定的公交线路布局难以适应因住户随机增长所造成的住户分布范围随机波动.
由图3 可知:在公交线路单阶段设计方案中,随着住户数的增加(即公交出行需求的增加),公交系统的发车间隔也随之降低;与中立风险设计相比,发车间隔在规避风险设计中更高,而在寻求风险设计中更低.
4.3 公交线路多阶段设计
多阶段设计中,公交线路随需求的增加而延长,这能有效地避免过早投资修建所造成的浪费(主要是运营和维护成本).表4 列出了3 种风险决策态度下公交线路多阶段设计的结果(阶段数为5 个),图4 呈现了均匀需求下3 种风险决策态度公交线路多阶段设计中各阶段的发车间隔和公交线路长度.
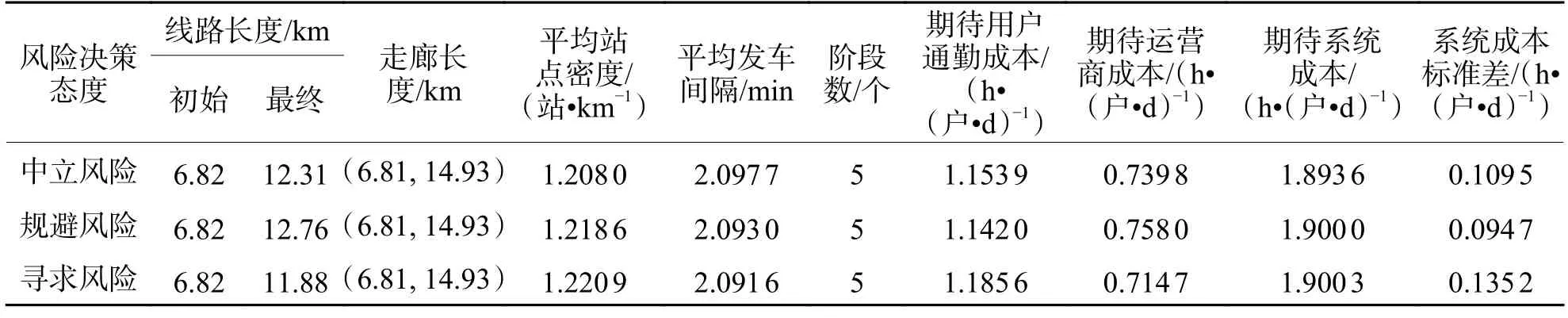
表4 公交线路多阶段设计结果Tab.4 Result of transit system with phased design

图4 公交系统多阶段设计结果Fig.4 Result of transit system under phased design
与公交线路单阶段设计中类似,规避风险决策态度促使公交线路更长,而寻求风险的更短(表4和图4(b)).不同的是,多阶段设计在公交线路单阶段风险决策态度下不仅系统成本更低,其系统成本的稳定性也更高,这与公交线路的可延伸性有关.多阶段的公交线路设计能适时地响应增长的出行需求,降低因过早修建公交线路和站点所带来的空载运营成本.与公交线路全覆盖设计相比,多阶段设计的优势在于其系统成本更低.与公交线路全覆盖和单阶段设计都不同的是,寻求风险方式与规避风险方式对公交系统设计的影响并非完全相反.规避风险决策和寻求风险决策都会增加平均站点密度和降低平均发车间隔,该现象与寻求风险决策中第一次公交线路延伸实施时间被推迟有关.综上,多阶段设计中风险决策态度对公交系统设计的影响比较复杂.
图4 表明,发车间隔在未延伸公交线路时随需求的增加而降低,而在整体上随出行需求的增加而增加.前者因为公交线路长度未变化,类似公交线路单阶段设计中的发车间隔变化特征,而后者因为公交线路长度在变化,这与全覆盖设计中的结果类似.图4(a)还说明在寻求风险方式中,更高的站点密度推迟了公交线路各次延伸的实施时间,但未减少设计方案的阶段数.该结论暗示当目标函数中方差影响系数ξ足够大时,其设计方案的阶段数可能会减少.
5 结论
本文对不同设计策略(全覆盖设计、单阶段设计和多阶段非全覆盖设计)和不同的风险决策态度(中立风险决策、规避风险决策和寻求风险决策)下的公交走廊设计进行了对比分析.实验结果表明:
1)本文提出的基于均值-方差理论的风险态度决策方法在公交走廊多阶段设计中效果良好,具体表现为与中立风险相比,规避风险方式能提供系统成本更稳定的方案,而追求风险方式则得到系统成本波动更大的方案.
2)多阶段设计具有比单阶段设计和全覆盖设计更低的系统成本,比单阶段设计更稳定的系统成本.
3)不同风险决策态度都是通过调整用户的通勤成本来控制系统成本的波动(表现为系统成本标准差),即在规避风险模型中降低通勤成本,寻求规避模型中增加通勤成本.
4)在不同设计策略中,不同风险决策态度对公交系统设计参数(即公交线路长度、站点分布和发车间隔)的影响有所不同,具体表现为与中立风险决策方案相比:在全覆盖设计中,规避风险决策会增加平均站点密度,并降低平均发车间隔,而寻求风险决策相反;在单阶段设计中,规避风险决策会增加公交线路长度和发车间隔,降低平均站点密集度,而寻求风险决策相反;在多阶段设计中,风险决策态度对公交系统平均发车间隔和站点密度的影响较为复杂,这与线路延伸的实施时间有关.
致谢:太原科技大学博士科研启动基金(20202048).
