雨天沥青路面能见度影响因素分析
2023-12-21何兆益
汪 敏 ,何兆益 ,周 文 ,梁 昕
(1.重庆交通大学土木工程学院,重庆 400074;2.广西交通投资集团有限公司,广西 南宁 530022;3.珠海港物流发展有限公司,广东 珠海 519050)
雾是由大量悬浮在近地面空气中的微小水滴或冰晶组成的气溶胶系统,是近地面层空气中水汽凝结或凝华的产物.降雨尤其是强降雨情况下,汽车行车过程轮胎所溅起的水花在某些温度、气压、相对湿度、风向和风速条件下极易形成水雾,将显著降低能见度.
在雨天,沥青路面会不同程度出现水膜,车辆在沥青路面上高速行驶,车轮会在水膜上碾压溅起水珠,其四周产生不同大小的水雾[1].多数交通事故是由不良的视距条件导致,司机视觉特性受能见度的影响,一旦出现水雾,前方能见度会显著下降,人体主观的识别距离也随之迅速减小,甚至出现对行车间距的错误判断,从而造成交通事故,水雾已经成为道路行车的重大安全隐患[2].
国内外学者在能见度和行车安全方面开展了相关研究:Konstantopoulos 等[3]通过对不同司机眼球运动的观测,发现暴雨天时司机的视觉搜索能力全部明显下降,低能见度下行车极不安全;Peng等[4]发现有95.4%的车辆超速发生在低能见度条件下,其碰撞风险非常大,极易出现追尾;刘春媛[5]用激光大气透射仪模型对光子传输过程进行了模拟,研究了低能见度条件下多次散射对能见度测量造成的影响;高国强[6]用米氏散射理论研究了衰减效率因子随散射微粒尺寸变化的规律.
很多研究仅仅集中在水雾的形成原理方面,而并未考虑到路面结构的影响[1-15].如果可以通过路面结构设计参数和降雨量来预判能见度大小,提出沥青路面的合理安全车距,将显著提高现有沥青路面的安全性能,尤其体现在行车安全预警和自动驾驶感知应用方面,这对道路的线形设计和运营保障具有重要的理论意义和应用价值.
本文以米氏理论为基础,结合光子在有雾珠的空气中多重散射特性,采用MATLAB 软件进行蒙特卡罗数值模拟,利用能见度的气象学定义来表征能见度,结合沥青路面形成水膜的条件,建立车速、路面设计参数、降雨量和能见度之间的关系,提出用车速和路面设计参数表征的能见度计算模型,分析雨天沥青路面能见度的影响因素,以期提高行车安全性能,并对自动驾驶车辆识别雨天能见度提供一定的参考.
1 数值模拟
1.1 基本原理
在气象学中,能见度用气象光学视程表示,是指白炽灯发出色温为2 700 K 的平行光束的光通量,在大气中削弱至初始值5%所通过的路径长度,从定义出发,只需通过对光子的行走路径进行全程数值模拟,取光子总量最后5%的剩余值所能达到的路径长度,就可以得到能见度大小[1].
数值模拟采用MATLAB 软件的蒙特卡罗方法进行,计算光子在雾中经多重散射后到达接收平面的光子数.每一个光子在散射的过程中会出现4 种可能性,即逃逸、碰撞、散射和吸收,可能性是随机的,定义为概率密度函数,同时,光子与光子之间碰撞又会改变其原有的运动轨迹,也就是对多重散射的数值模拟[7].只要数值模拟的光子数量(样本)足够多,最终结果就接近于真实值,从计算机能力和模拟结果真实性的角度综合考虑,研究样本取10 000 个光子数.
1.2 模型基本参数
1.2.1 水雾粒子散射物理参数
水雾粒子的散射特性参数可采用米氏理论定义,包括消光系数Ke、吸收系数Ka、散射系数KS、散射相位函数P(θ)、散射光S1和S2的振幅函数[13],其表达式如式(1)~(6)所示.
1.2.2 水雾粒子浓度参数
雨天路面会不同程度出现水膜,车辆在路面上高速行驶,车轮会在水膜上碾压产生动水压力且溅起水珠,其四周产生不同大小的水雾,依据水雾所在方位有4 种波形,包括胎前波(BW)、侧边波(SW)、胎起波(TP)和黏附波(CA),其中,胎前波和黏附波溅起水雾非常小,可忽略,水雾仅考虑胎起波和侧边波的水量[1].
载重车辆在高速行驶时,轮胎碾压水膜的雾化作用类似于射流雾化形成大量液滴的物理过程,这个过程相当复杂,在同一测量点,平均液滴直径会随工作压力升高而减小,但工作压力对液滴直径影响的显著性与至溅水点的距离有关.为便于研究,对实际情况进行合理的简化.假设车辆在一个固定大小的空间内产生水雾,尺寸为4.0m×2.5m× 1.6 m,侧边波和胎起波的水量如式(9)所示.
式中:v为车速,m/s;b为轮胎宽度,m;h为水膜厚度,m;γW为水的密度,kg/m3;k为轮胎胎面非凹槽的宽度占比,取0.75;hfilm为轮胎每次旋转带起的水膜厚度,水深大于0.000 1 m 时,取0.000 1 m,不足0.000 1 m 时,取为水深;hgroove为胎面上的水膜厚,水深大于 0.01 m 时,取0.01 m,不足0.01 m 时,取为水深[1].
对后车能见度产生影响的水雾总量M=MTP+MSW,水雾量化后的体积与其存在空间体积之比Cv=M/(16γW).由轮胎溅水产生的水雾粒子数浓度N0=Cv/V0[7],其中,V0为水雾粒子的体积[7].
1.3 多重散射概率模型及算法实现
光子连续发生2 次(k和k+1 次)碰撞之间所经历的距离为传输步长dk,dk其中,r1为[0,1]内的随机数,r为水雾粒子半径,k=1,2,…,n.光子与水雾粒子发生碰撞后,可能被水雾粒子吸收或散射,这时取在[0,1]内的随机数r2,当r2≤ka/ke时,认为光子被吸收,否则,光子发生散射.光子发生散射后,新的运动路径由介质的散射相位函数P(θ) 与散射角 θ 和方位角 φ 决定,φ=2πr3,其中,r3为[0,1]内的随机实数.r4为[0,1]内的另一个随机数,用θ 表达,,可以反算得散射角θ[7].
r1、r2、r3、r4就是描述光子与水雾粒子相互作用的概率模型:r1决定2 次碰撞之间的传播距离,r2决定碰撞的结果,r3和r4决定碰撞后光子新的运动方向[7].
假设光子从z=l1平面向下出发,如图1 所示.传播方向平行于z轴,第1 次碰撞后,新方向与x轴夹角为 ϕ1,与z轴的夹角为 θ1,光子在z轴方向的偏移距离ΔZ1=d1cos θ1;第2 次碰撞之后,新方向与x轴夹角 ϕ2是垂直平面D1上新方向与x轴的夹角,θ2是新方向与平面D1的夹角,在平面D1上的厚度差为d2cos θ1,继续转换至z方向,偏移距离ΔZ2=d2cosθ1cosθ2.以此类推,第n次碰撞之后,偏移距离如此循环,直至所有光子到达探测平面为止,蒙特卡洛仿真算法如图2 所示[1].图中,(xmk,ymk,zmk)为第m个光子第k次发生碰撞的位置.

图1 气象学表征能见度示意图Fig.1 Meteorological characterization of visibility
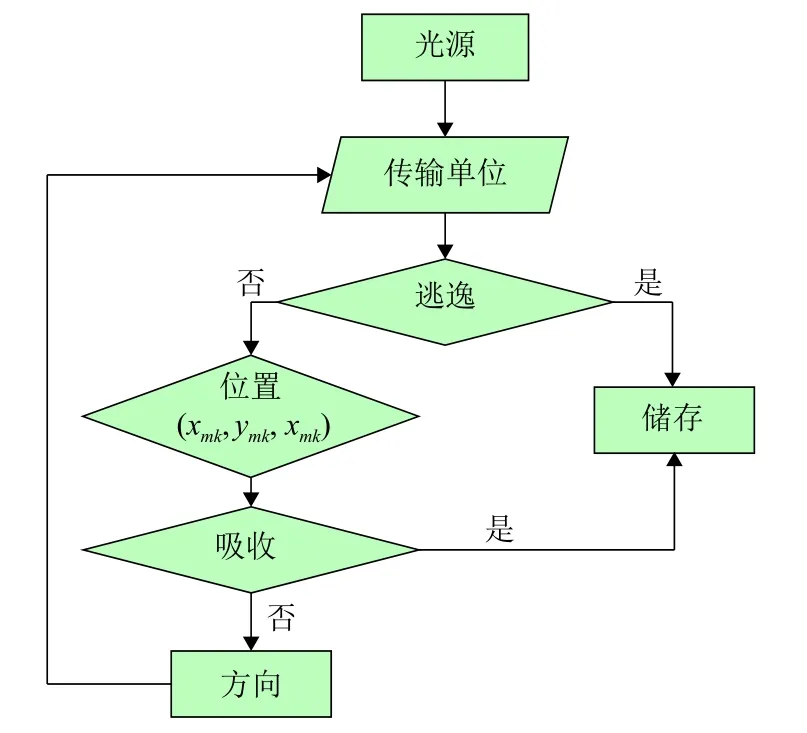
图2 蒙特卡罗模拟光子多重散射示意Fig.2 Monte Carlo simulation of photon multiple scattering
2 数值模型结果分析
不同水膜厚度和车速的数值模拟结果见表1、图3所示,通过模拟结果发现:1)在车速60 km/h 以上时,轮胎在碾压水膜下产生的水雾引起的能见度(V)最大不超过200.00 m,最小接近100.00 m;2)当水膜厚度大于0.500 mm 时,能见度随车速增加而加速减小,车速越大,敏感性越高;3)车速在80 km/h 以下时,水膜厚度的增加对能见度影响不大.
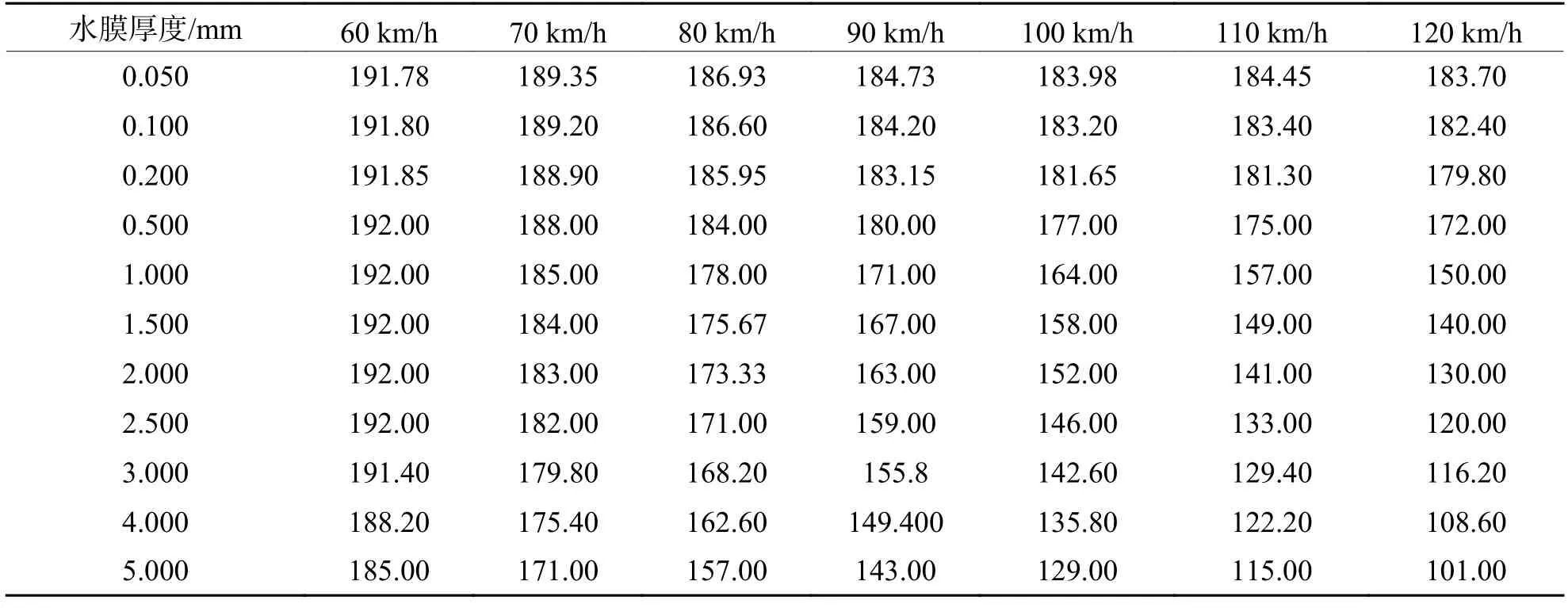
表1 能见度数值模拟数据汇总表Tab.1 Summary of visibility numerical simulation data m

图3 能见度和行驶速度、水膜厚度之间关系Fig.3 Relationship among visibility,vehicle speed,and water film thicknesses
从气象学上对能见度的技术标准划分如表2[8].可以看到,能见度小于200.00 m 时能见度极差,从前述模拟分析发现,当水膜厚度超过0.500 mm 时,轮胎溅起的水雾产生的能见度就会迅速下降,给行车安全造成巨大隐患,因此,必须采取相应的安全警示措施来增强交通安全性.

表2 能见度状态划分标准Tab.2 Division standard of visibility state
3 能见度影响因素分析
3.1 水膜厚度与能见度的关系
选取时速为120 km 的数据,建立能见度与水膜厚度的关系曲线,如图4 所示.

图4 车速120 km/h 时不同水膜厚度产生水雾能见度变化趋势Fig.4 Variation trend of water mist visibility under different water film thicknesses at 120 km/h
同理,将车速为60~120 km/h 时的能见度与水膜厚度关系式列出,如表3 所示.
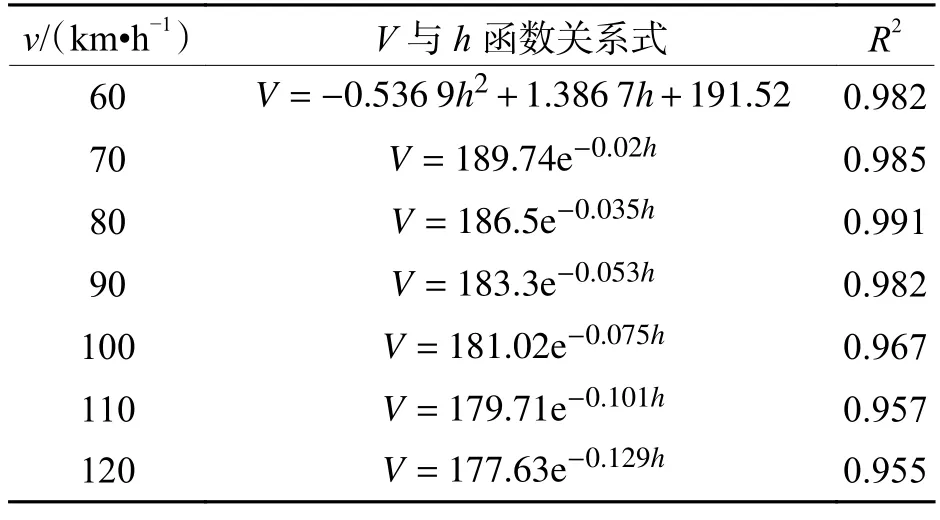
表3 不同车速下能见度与水膜厚度关系汇总Tab.3 Summary of functional relationship between visibility and water film at different vehicle speeds
从表3 可见,当车速超过60 km/h 时,能见度与水膜厚度之间呈指数关系,在同一车速等级下,能见度随水膜厚度增加而减少,呈负相关性.
3.2 能见度与水膜厚度及车速的关系
从3.1 分析可知,能见度与水膜厚度呈指数关系,而与车速之间的函数关系未知,而表3 所罗列的公式均是按不同车速给出,给使用者造成一定的麻烦,因此,需要将车速和水膜厚度同时考虑,建立统一的多元非线性回归函数.
第2 节中,用MATLAB 软件进行蒙特卡罗数值模拟出的能见度值如表4 所示.

表4 蒙特卡罗数值模拟能见度汇总Tab.4 Summary of Monte Carlo numerical simulation visibility m
以V为因变量,h和v为自变量,假定之间的预估模型为多元非线性回归方程[16],如式(10)所示.
式中:A、B、C均为待定系数;f(h) 为以h为自变量的函数,函数形式未知;g(v) 为以车速v为自变量的函数,函数形式未知.
为了对表4 中的数据进行多元非线性回归分析,利用统计分析软件SPSS 进行数据处理,其中的f(h)和g(v) 函数形式可能为多项式、指数函数、对数函数等组合,将式(8)中的多种组合形式列于表5中.表中:D、E、F、G、H、J、K均为待定系数
将表4 中的数据进行单位统一后输入SPSS软件,分别对表5 中的各种情况进行试算,得到各组合形式的R2分别为0.685、-0.315、0.828、-0.476、0.772、0.682、-0.657、0.716、0.583,取判断系数最大的函数组合形式为最终非线性回归方程.发现第3 种函数组合形式的判断系数最大,R2=0.828,其数学统计分析结果如表6、7、8 所示.

表6 第3 种函数组合数学统计特征值表Tab.6 Statistical eigenvalues of the third function combination

表7 第3 种函数组合参数估算值Tab.7 Estimated values of the third function combination parameters
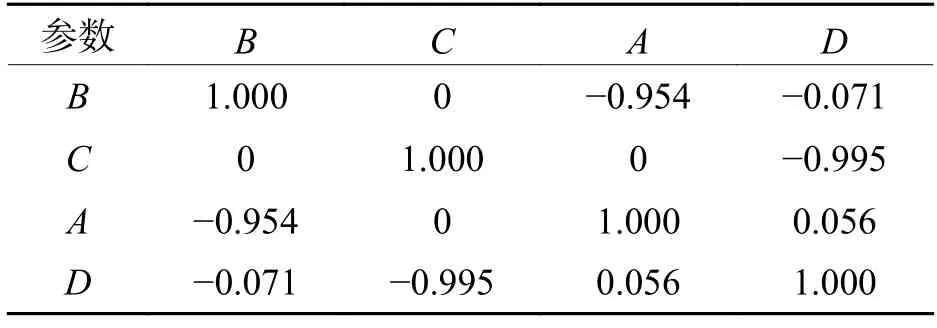
表8 第3 种函数组合参数估算值相关性Tab.8 Correlation of estimated values of the third function combination parameters
采用SPSS 软件的多元非线性回归第3 种组合函数形式,能见度与水膜厚度、车速的预估模型如式(11)所示.
从式(11)可以发现,h表征的函数是一元二次方程,当h=5.873 m 时,函数达到极小值;在h∈(0,5.873)m 时,函数关系呈单调递减,能见度随水膜厚度增加而减小.
用v表征的函数是自然对数方程,其系数为负值,函数呈单调递减,说明随车速增加能见度将减小,其变化趋势与水膜厚度一致.
回归模型说明,在雨天,沥青路面水膜厚度低于5.873 mm 的情况下,水雾引起的能见度会随车速和水膜厚度增加而不断减小.
如果能通过现场测量雨天时的水膜厚度和车速,就可以获得车辆行驶在有积水的路面上由水雾产生的能见度大小,这个能见度也就是相邻两车之间最小的刹车距离.车速越大,高速行驶时相邻两车之间的安全距离越小,在水膜厚度为5.873 mm 时达到极小值,也充分说明控制车速是提高雨天行车安全的必备条件.
3.3 能见度与路面设计参数关系
式(11)为降雨时路面产生水膜厚度和车速来表征的能见度公式,而现场准确测量水膜厚度是比较困难的.如果能将影响水膜厚度的因素与能见度建立关系,就可以降低水膜厚度现场测量的难度,并找到雨天路面行车溅水后形成水雾对能见度的影响因素.
对路面因降雨引起的水膜,国内外展开了一系列的研究及探索工作,并建立了水膜厚度计算模型,如表9 所示.表中:RRL 为英国道路研究实验室,VERT 为欧盟车辆-轮胎相互作用研究项目,NCHRP为美国国家合作公路研究计划.

表9 国内外水膜厚度预测模型汇总表Tab.9 Summary of water film thickness prediction models in China and abroad
从表9 可知,水膜厚度主要与降雨强度、路面坡度、排水路径长度和构造深度等因素有关,这就说明雨天行车溅水产生水雾导致的能见度可以用路面设计参数来表征.
东南大学季天剑等[17]基于连通器原理,结合我国道路的实际情况,以AC-25 改进型、AC-20 改进型和SMA-13 路面为研究对象,进行水膜厚度测量相关试验,建立预估水膜厚度的回归模型[17].考虑到我国国情,将该模型作为本文计算式,如式(12)所示.
将式(12)代入式(11),得到能见度与降雨强度、排水路径长度、路面坡度、路面构造深度的函数关系,如式(13)所示.
式(13)是对式(11)的改进,特别适用于水膜厚度不易准确测量的情况,可以直接建立能见度与降雨强度和路面设计参数之间的关系.
从式(13)可以看到:路面设计参数中,排水路径长度与能见度呈正相关,路径越长能见度越大;路面坡度与能见度呈负相关,坡度越陡能见度越小;路面构造深度与能见度呈正相关,构造深度越大能见度越大.
如果现场能够测得降雨强度,又已知排水路径长度、路面坡度和构造深度,通过式(13)就能预估出高速行车溅水所产生水雾而造成的能见度大小,也就是相邻两车之间的停车安全视距.将雨天交通信息通过云端传输到自动驾驶行车电脑,就能作出安全警示,有效提高自动驾驶车辆的交通安全,这对自动驾驶获取道路安全信息提供了一个新的渠道.
同时,对高速公路路段,可以在路侧安装即时测量仪器,提供安全能见度预警,及时告知正在高速行驶的司机保持合适的行车间距,这将显著提高高速行车的安全性,有效提高高速公路的智能化水平.
4 结论
1)在雨天,沥青路面水膜厚度低于5.873 mm的情况下,水雾引起的能见度会随车速和水膜厚度增加而不断减小.
2)路面设计参数中,排水路径长度、路面构造深度与能见度呈正相关性;路面坡度与能见度呈负相关性.
3)提出了用水膜厚度和车速表征的能见度计算模型,发现在水膜厚度为5.873 mm 时达到极小值.
4)提出了用降雨强度、路面构造深度、路面坡度、排水路径长度和车速表征的沥青路面能见度改进计算模型.
