基于油液-振动多维特征与PSO-LSTM的齿轮箱磨损状态监测*
2023-12-21郭向阳王建国
郭向阳 王建国 范 斌 张 超 于 航
(1.内蒙古科技大学机械工程学院 内蒙古包头 014010;2.内蒙古农业大学机电工程学院 内蒙古呼和浩特 010018)
齿轮箱是机械传动系统的关键部件,其健康状态直接影响整个机械系统的性能。其中,齿轮箱中的齿轮极易发生磨损,齿轮的健康状态直接影响齿轮箱的运行情况[1]。所以,在齿轮箱工作过程中对齿轮进行磨损状态监测具有重要意义。目前齿轮箱磨损状态监测技术有振动监测、油液监测和超声监测等,其中振动监测和油液监测是目前齿轮箱磨损状态监测的主要技术手段[2]。振动监测技术是通过在齿轮箱上安装振动传感器采集原始振动信号,目前比较常用的方法有时域分析法、频域分析法。近年来,许多学者通过时域频域特征融合[3]、提取原始振动信号的图谱特征[4]以及多传感器数据融合[5]等方法大大提高了齿轮箱磨损状态监测能力。油液监测技术是对机器的润滑剂的理化特性和携带的磨粒进行分析,获得机器的润滑与磨损状态信息,从而对机器进行故障预测,确定故障类型[6]。机器磨损会产生磨粒,磨粒带有大量表征机器状态的信息。经过多年发展,目前基于电磁、超声、光学等技术研发的磨粒监测传感器在监测磨粒浓度、个数以及具体形貌等方面已经取得了良好的效果,在很多领域已经实现了应用[7]。
近年来,随着人工智能技术的发展,深度学习技术应用在铁谱图像识别上可以很好地对磨粒进行定性和定量分析[8]。振动监测在齿轮裂纹识别方面效果较好,但是无法有效监测到齿面的微点蚀。而通过监测润滑油液中的磨粒浓度、磨粒个数等特征信息可以有效地反映齿轮箱摩擦副的磨损程度,但是无法及时地识别到齿轮裂纹。可见单一的监测技术很难准确、全面地反映设备状态,而将振动监测和油液监测相结合有利于更加全面地反映齿轮箱的运行状态[9]。
齿轮箱在运行过程中各个部件间存在关联耦合现象,所以产生的振动和油液数据具有非线性的特点,同时振动和油液数据是时间序列数据,其当前时刻的数据与历史时刻的数据具有时间关联性[10]。WANG等[11]使用深度神经网络(DNN)对齿轮箱状态进行了预测,但是该模型不能很好地挖掘数据间的时间关联性。张龙等人[12]使用循环神经网络(RNN)对齿轮箱状态进行了预测,一定程度上提高了齿轮箱故障诊断精度,但是RNN存在梯度消失和爆炸问题。长短期记忆神经网络(LSTM)是一种基于时间序列的神经网络,并且拥有非线性层,能够充分挖掘时序数据的深层信息以提高状态监测的性能,同时也解决了RNN的梯度消失和爆炸问题[13]。何群等人[14]使用油温监测LSTM模型对齿轮箱进行故障预测,表现出很好的预测性,但是模型的参数取值多靠研究人员的经验。粒子群优化算法(PSO)是一种从随机解出发,通过迭代不断地寻找当前最优值来求得全局最优解,该算法具有速度快、精度高的优点,适用于神经网络模型的参数寻优[15]。
为此,本文作者提出了基于油液-振动多维特征与粒子群优化算法-长短时记忆神经网络(PSO-LSTM)的齿轮箱磨损状态监测算法;对铁谱图像进行预处理,提取磨粒浓度特征、磨粒个数特征,对振动信号进行小波阈值去噪,并提取时域特征,得到油液振动十四维特征作为LSTM模型的输入;采用粒子群优化算法对LSTM模型进行参数寻优,利用采集的齿轮箱全寿命实验数据进行实验和对比。
1 算法设计
算法流程如图1所示。具体步骤为:(1)将铁谱图像进行预处理操作,并提取磨粒浓度特征以及磨粒个数特征;(2)将振动数据进行小波阈值去噪,并提取时域特征;(3)将上述特征组成油液振动十四维特征,并进行归一化处理;(4)将LSTM模型的隐藏神经元个数和学习率设置为寻优参数,初始化粒子群,当达到最大迭代次数时停止迭代更新,确定学习率和隐藏神经元个数;(5)使用最优参数的LSTM模型完成齿轮箱的磨损状态预测。

图1 算法流程
2 算法实现
2.1 油液特征提取
2.1.1 铁谱图像预处理
首先,需要对铁谱图像进行预处理。如图2(a)所示,对铁谱图像进行灰度化,并采用中心为5的8领域拉普拉斯算子进行磨粒图像增强,使磨粒图像更加清晰,增大磨粒与气泡的灰度反差,同时突出微小磨粒的细节信息。如图2(b)所示,使用最大类间方差算法(Otsu算法)进行磨粒分割,得到铁谱二值化图像,以便进行特征提取[16]。

图2 铁谱图像预处理
2.1.2 磨粒浓度特征提取
计算磨粒浓度指标即磨粒覆盖面积指数(IPCA),计算二值化铁谱图像中灰度值为0的像素点个数,记为W,与二值化铁谱图像中的总像素点个数X×Y作比,如公式(1)所示,即为磨粒浓度。该指标可以反映齿轮箱的磨损状态[17]。
(1)
式中:W为灰度值为0的像素点的个数;X为二值化铁谱图片的高度,单位为像素;Y为二值化铁谱图片的宽度,单位为像素。
2.1.3 磨粒个数特征提取
使用opencv中的cv2.findContours函数进行磨粒边缘检测提取磨粒轮廓,然后使用cv2.contour-Area函数进行磨粒轮廓面积计算,文中将面积大于45小于100的磨粒定义为小型磨粒,将面积大于100小于200的磨粒定义为中型磨粒,将面积大于200的磨粒定义为大型磨粒,统计每张铁谱图像三类磨粒个数,如图3所示。
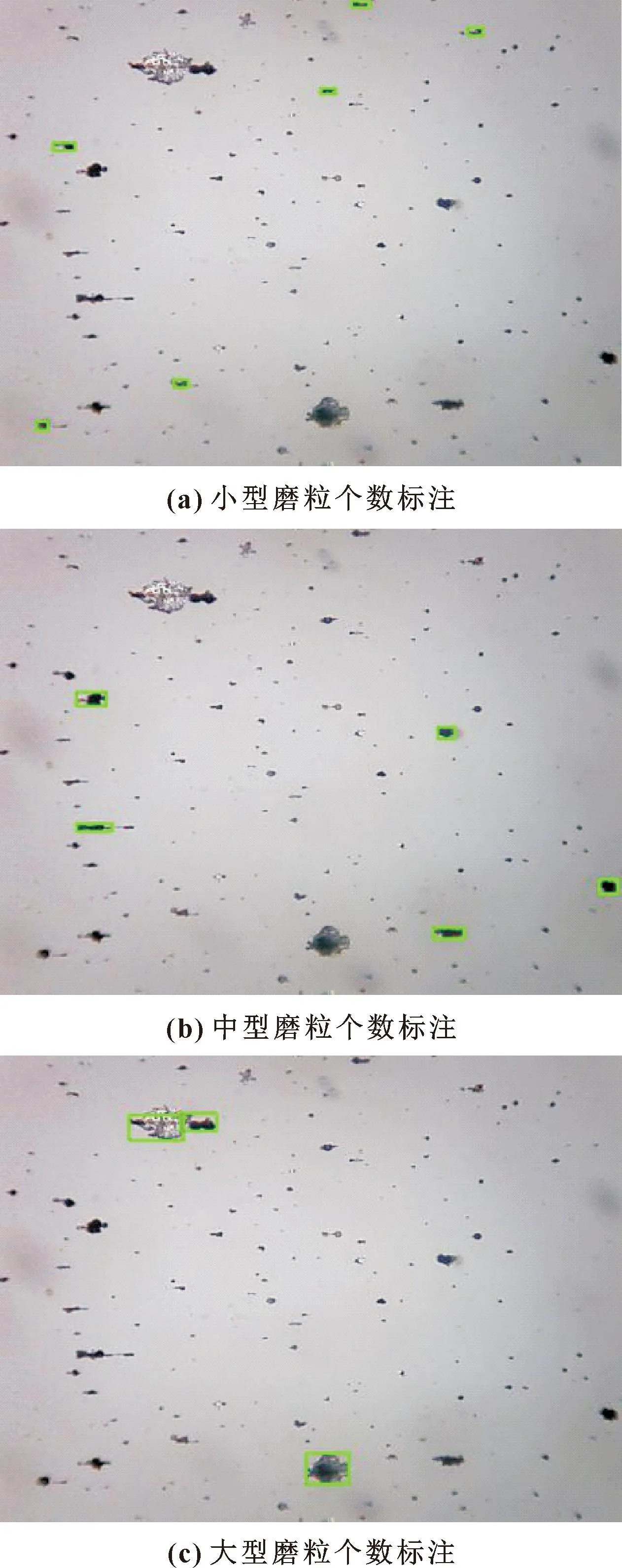
图3 磨粒个数标注
2.2 振动特征提取
2.2.1 小波阈值去噪
由于外部环境以及人为原因,振动加速度传感器采集的原始信号存在许多噪声,这样很难提取到有效的特征,所以在进行特征提取前需要进行去噪处理。小波阈值去噪克服了短时傅里叶变换窗口大小不随时间变化,滑动平均滤波算法丢失较多信息等缺点,可以有效减少齿轮箱振动加速度信号中的噪声[18]。小波阈值去噪分为3个步骤:(1)选定一个小波基函数对振动加速度信号进行N层分解计算,分解后得到多个小波系数;(2)将多个小波系数中的高频系数视为噪声,并对其进行阈值收缩处理;(3)将低频系数和经过阈值收缩处理的高频系数进行小波重构。Db小波基函数对齿轮箱振动信号去噪具有较好的效果[19],文中采用Db14小波基,分解层数为3层,采用自适应阈值,阈值公式如公式(2)所示。
(2)
式中:cD1为第一层分解的高频系数;A为振动信号长度;N为分解层数。
阈值函数的选取直接影响去噪信号的连续性以及与原始信号的相似度,是去噪的关键所在[20]。阈值函数常用的有软阈值函数、硬阈值函数、软硬阈值折衷函数。如公式(3)所示。
(3)
式中:ω为小波系数;λ为阈值,n=0时为硬阈值函数,n=1时为软阈值函数,0 为了比较不同阈值函数的去噪效果,使用实验数据进行去噪测试,使用信噪比(SNR)和均方根误差(RMSE)进行去噪效果评价,如公式(4)和公式(5)所示。 (4) (5) 式中:X2(i)表示去噪后的信号;Y2(i)表示原始振动加速度信号;Nr表示采样点数。 结果如表1所示。 表1 去噪效果评价 SNR的值与去噪效果成正比,RMSE的值与去噪效果成反比。可以得出,去噪效果最好的是硬阈值函数,其去噪效果如图4所示。 图4 振动信号去噪前后对比 2.2.2 时域特征提取 对滤波后的振动加速度时间序列提取10种常用的时域特征,定义时域特征向量 T1=[ρ1ρ2ρ3…ρ10] (6) 式中:ρ1…ρ10分别为有量纲特征,包括均值、峰值、均方根值、方根幅值、峭度、偏斜度,无量纲特征包括波形指标、峰值指标、脉冲指标、裕度指标[21]。 2.2.3 特征归一化 将时域特征、磨粒浓度特征、磨粒个数特征组合得到14维特征向量T=[ρ1ρ2ρ3…ρ14],同时进行归一化处理,如公式(7)所示 (7) 式中:x表示特征向量中的任意特征;xmax是特征向量中的最大值;xmin是特征向量中的最小值。 LSTM的单元结构如图5所示。LSTM主要包括了3个门结构,遗忘门ft作用于细胞状态,将细胞状态中的信息选择性遗忘。输入门it作用于细胞状态,将新信息选择性地记录到细胞状态中。输出门ot作用于隐层状态ht,决定输出什么信息[13]。LSTM神经单元内的数据传递计算方式如公式(8)所示。 图5 LSTM单元结构 (8) 式中:W表示权重;b表示偏置量。 (9) 式中:w表示惯性权重;c1、c2为惯性因子;r1和r2的取值范围为[0,1]。 使用图6所示的齿轮加速磨损试验台进行齿轮箱全寿命周期加速故障实验。实验总共进行200 h,期间通过工业内窥镜观察齿轮磨损情况,将0~70 h定义为正常磨损阶段,70~110 h定义为轻微磨损阶段,110~160 h定义为异常磨损阶段,160~200 h定义为严重磨损阶段。将采集的原始振动加速度数据和铁谱图像进行特征提取,并根据监测时间组成油液振动十四维特征数据,按照磨损阶段划分打上四类标签,随后进行归一化处理,制作了2 146组数据。将数据集按照5∶1的比例分为训练集和测试集。 PSO-LSTM模型的初始化参数设置如表2所示,文中所使用的LSTM由1个输入层、1个LSTM层、1个全连接层、1个Dropout层、1个softmax层和1个分类层组成。待优化的学习率的范围为[0.01,0.09],隐藏神经元个数的范围为[20,100]。 表2 PSO-LSTM参数设置 将油液振动十四维特征数据分别输入自定义学习率为0.07、隐藏神经元个数为15的LSTM模型和学习率、隐藏神经元个数自适应优化的PSO-LSTM模型中进行训练以及预测,得出最优学习率为0.05、最优隐藏神经元个数为25。对比LSTM模型和PSO-LSTM模型的识别准确率如表3所示。 表3 优化前后模型准确率对比 通过对比可以看出,PSO-LSTM模型对于油液振动十四维特征数据的识别准确率全面优于未经优化的LSTM模型。与未优化前的LSTM模型相比,PSO-LSTM模型总体识别率提高4%。 为了对比不同特征维度下PSO-LSTM模型的识别准确率,使用时域特征组成的振动十维特征数据,磨粒浓度特征、磨粒个数特征组成的油液四维特征数据,时域特征、磨粒浓度特征和磨粒个数特征组成的油液振动十四维特征数据分别输入PSO-LSTM模型进行训练以及预测,其准确率如表4所示,并输出最优参数。 表4 不同特征下PSO-LSTM模型准确率对比 通过对比可以看出,使用油液振动十四维特征相比于振动十维特征和油液四维特征在正常磨损阶段、轻微磨损阶段、异常磨损阶段,严重磨损阶段的准确率都有提升,并且总体准确率分别提升了27.8%和22.2%。 提出了基于油液-振动多维特征与PSO-LSTM的齿轮箱磨损状态监测算法。以齿轮箱全寿命实验的数据进行实验分析,结果表明:使用油液振动十四维特征的PSO-LSTM模型的总体准确率要优于单独使用振动和油液特征的PSO-LSTM模型;同时,PSO-LSTM模型对于油液振动十四维特征数据的识别准确率全面优于未经优化的LSTM模型。

2.3 长短时记忆神经网络

2.4 粒子群优化算法

3 实验分析与讨论
3.1 数据集准备
3.2 PSO-LSTM模型参数设置

3.3 对比分析


4 结论
