全向式舵轮移动平台控制系统设计
2023-12-18樊建强王亦敏李凯丽
樊建强,王亦敏,李凯丽,化 荣
(晋中信息学院智能工程学院,山西 太谷 030800)
全向式移动机器人不存在非完整约束,容易控制,运动更加快速灵活,是移动机器人设计的发展趋势。全向式移动平台具有全方位运动功能的关键在于其单独轮系的结构设计。舵轮是一种集成了驱动电机、航向电机、减速器等为一体的机械结构,其轮内含有2个功能不同的电机,一个为牵引电机,驱动车轮前进或后退;另一个为航向电机,用于驱动车轮以纵轴为原点做旋转运动,控制整个车轮在行进时的运动方向,实现车体在不旋转车身的情况下全方位式移动。这种机构不会产生其他方向的分力,改善了普通全向轮接触面积小容易打滑和震动的缺陷,提高了运输效率以及机器人到达目标位置的准确性[1]。
1 舵轮移动平台机构设计
采用SolidWorks成图建模软件对整体的机构进行建模设计。舵轮移动平台机构设计见图1。由图1 可以看出,移动平台的整体设计为正方形式的布局,骨架采用材质较轻的铝质管材,每组舵轮结构中,驱动电机通过一个小型的变速齿轮结构连接到轮子上形成一个整体,更加模块化,拆卸方便;车轮外部包裹了一层聚氨酯材料,可以增大车轮与地面之间的摩擦力,防止移动平台整体在移动过程中打滑;车轮的方向由一个转向电机控制,转向电机连接着一组1∶4 的减速齿轮,增大了电机的转矩,避免电机在控制车轮转向时由于负载过大而卡死;舵轮的整体与一块玻璃纤维板材连接在一起,玻璃纤维板拥有一定的弹性,在和车架连接时可以起到一定的悬挂作用,提高了车轮在地面附着力,使平台在一些特殊的地形上也可以行走。
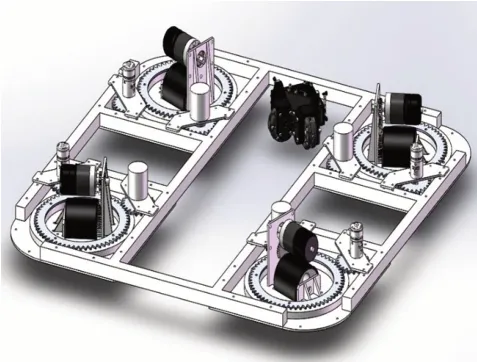
图1 全向式舵轮移动平台结构设计Fig.1 Structure design of omnidirectional steering wheel moving platform
2 控制系统硬件设计
移动平台控制系统的整体硬件结构见图2。图2 显示整个硬件系统部分由电源模块、单片机模块、通信电平转换电路、AD采样电路、CAN总线通信电路等多个电路系统连接构成。
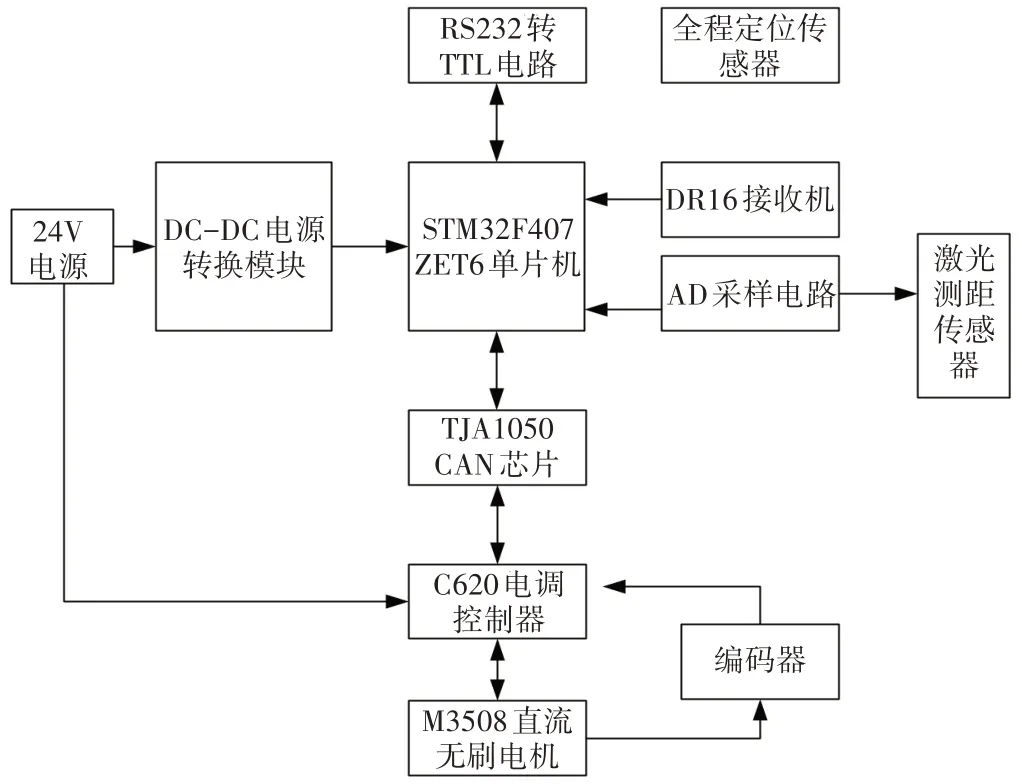
图2 移动平台硬件结构图Fig.2 Mobile platform hardware structure diagram
2.1 电源电路设计
24 V 电压转换为信号输出需5 V 电压,同时考虑到需要抑制共模噪声对电源输出造成的影响,在TPS5450 芯片的输入端加入了1 个共模扼流线圈,并且在其输出端加入了1 个滤波器BNX002来降低电源波纹。电源电路见图3。
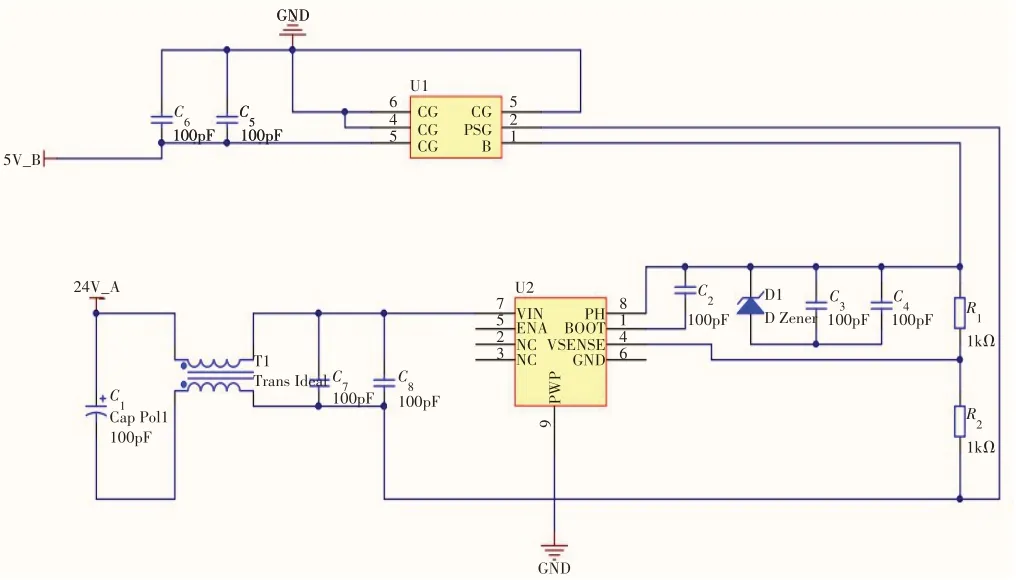
图3 5 V电路Fig.3 5 V circuit
2.2 串口通信电路
全场定位传感器输出的是RS232 串口电平信号,单片机只能接收到TTL 电平信号进行处理,为了实现正常的串口通讯,需要再将RS232 电平转化成单片机可以读取的TTL 电平,这时就需要使用MAX232 芯片对收发信号进行转换[2]。串口通讯电路见图4。

图4 RS232转TTL电路Fig.4 RS232 to TTL circuit
遥控器的DR16接收器通过D_BUS协议与主控单片机进行通讯。由于D_BUS协议是一种负逻辑,读取信号时读取的是相反的电平,必须加硬件反相器[3]。取反电路见图5。
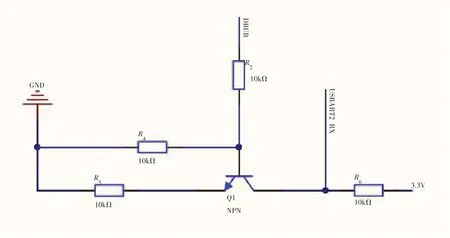
图5 取反电路Fig.5 Inverting circuit
2.3 电机信号控制电路
本设计采用的电机为M3508 直流无刷减速电机,其配备了拥有有感FOC 矢量控制技术的C620 电调,且自带编码器只需要通过C620 电调就可得到电机的信息对电机进行控制,C620 电调支持CAN 总线的通讯协议,每个电机都是一个相应的CAN节点,这时只需要将其和主控制器挂载在同一根CAN总线之上,就可以通过CAN总线发送命令控制电机的输出电流,实现对其转矩的控制[4]。CAN 收发电路见图6,通过TJA1050芯片实现了CAN控制器与物理接口间的通信。

图6 CAN收发电路Fig.6 CAN transceiver circuit
2.4 激光测距数据采样电路
激光测距传感器信号采集电路见图7。对反馈回来的模拟信号进行分压处理,然后再将其输出信号放大并降低噪声后,再通过单片机进行AD采样使得数据更加精确。
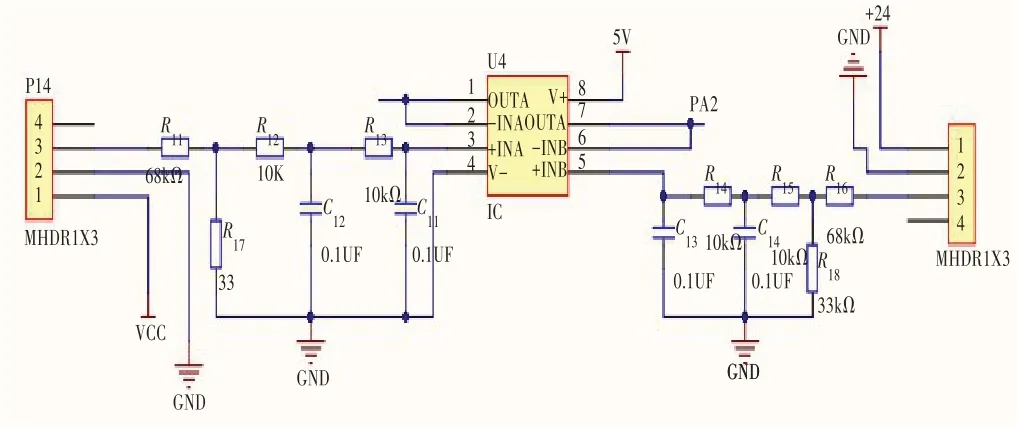
图7 AD采样电路Fig.7 AD sampling circuit
3 软件总体结构设计
主体设计思想采用模块化程序,自顶而下,分步按流程编写系统程序,得到的系统主程序流程见图8。
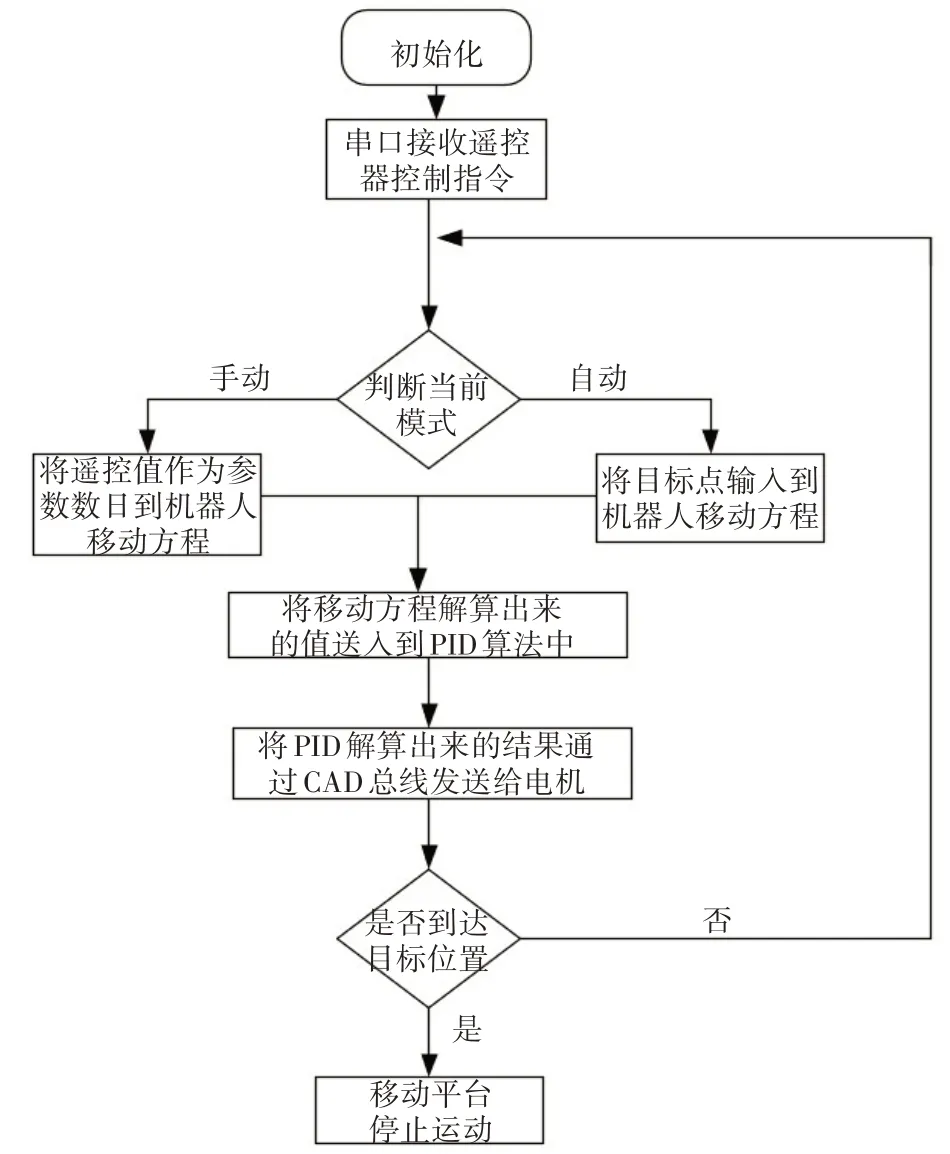
图8 程序设计流程图Fig.8 Programming flow chart
4 系统的调试
为了使整个移动平台能够完成任务,要通过修改单片机的程序来对整个系统进行调试。将整个单片机系统采集到的传感器信息进行验证,系统通过LCD 液晶显示器,显示出移动平台当前的位置信息,并通过激光测距传感器对移动平台的位置参数进行修正。
5 结语
本设计使用SolidWorks软件对移动平台的机械结构进行了建模分析,验证了其结构的可行性,以此实现人机交互的功能要求。