空气-悬浮液驱替条件下颗粒边壁滞留研究1)
2023-12-16李东奇杨志兵陈益峰
李东奇 杨志兵 张 乐 胡 冉 陈益峰
* (华北水利水电大学水利学院,郑州 450046)
† (武汉大学水资源工程与调度全国重点实验室,武汉 430072)
** (华北水利水电大学河南省水圈与流域重点实验室,郑州 450046)
引言
气(液)-液-颗粒多相流动是诸多自然与工业生产中的重要物理过程,例如:甲烷释放[1-2]、油气与矿产资源开采[3-6]、污染物运移与修复[7-8]、CO2地质封存与利用[9-11]、材料涂层制作[12-13]、制药与药物传输[14-15]等.气-液或非混溶液-液两相流作为多相流的基础,首先得到了国内外学者的广泛关注,其主要研究界面形态演化的控制机制,例如,驱替模式相图[16-17]、黏性指进流的生长与抑制[18-19]、介质湿润性诱发的角流与优势指流[20-21],以及液滴分流控制[22].当流体中存在固体颗粒时,如岩石侵蚀破裂的碎屑、流体与介质反应产生的结晶、污水排放的微塑料以及油气压裂开采使用的支撑剂等情形[23-29],此时气-液-颗粒多相流动过程受流体间驱替流动、颗粒运动迁移、边界几何结构等共同控制.
室内可视化实验观测是目前研究气-液-颗粒多相流动规律的主要技术手段.以经典Hele-Shaw 模型(平行板模型)为研究对象,Chevalier 等[30]和Sandnes等[31]分别研究了不同颗粒浓度和密度、流速条件下多相流驱替模式的转变,其结果表明颗粒不同的运移行为使流动驱替表现出指进、迷宫或珊瑚等结构图案.Li 等[32]的研究,发现了不同流速条件下颗粒存在沉降、悬浮和滞留3 种运移行为,并基于受力平衡分析与液膜理论,提出了颗粒运移行为判别准则.当仅关注颗粒的滞留问题时,目前研究多以开展浸涂(dip-coating)实验为主,即在充满颗粒悬浮液的水槽中提升固体板,随着提升速度的增加颗粒会滞留在固体表面上,从而形成了周期性条状或均匀密实等涂层结构[12-13],其也被称为对流自组装技术(convective self-assembly).Colosqui 等[33]基于格子玻尔兹曼方法模拟了dip-coating 过程中气-液界面的形态与颗粒的运动特性,揭示了颗粒在液体薄膜中的成簇滞留机制.Gans 等[34]、Sauret 等[35]和Palma 等[36]基于实验研究了提升速度、颗粒粒径和浓度对滞留行为的影响,并揭示了dip-coating 过程中颗粒的不同滞留模式.上述研究结果均表明颗粒的滞留行为与固体边壁上液膜的厚度密切相关.但液体的膜厚不仅与流体性质、流速有关,还受到流动边界的几何形状影响.为此,Jeong 等[37]和Wu 等[38]分别在圆形和矩形微通道中开展了空气驱替颗粒悬浮液的实验,研究了微通道中颗粒的滞留行为.多相流驱替过程中颗粒的滞留机制对揭示材料表面改性[35]、颗粒污染物运移[37-38]、通道的淤积堵塞[25,39]等方面具有重要意义.
上述实验与理论研究成果丰富了对颗粒滞留问题的认知.但不同流动通道结构中流场特征、弯液面形状与流动驱替模式有着显著的区别,对于具有一定间距的平行板流动构型(Hele-Shaw 模型)中颗粒滞留问题尚未得到充分的研究,其颗粒滞留的形态特征及控制机制仍不明晰.为此,本文基于自主搭建的多相流可视化实验装置,在经典Hele-Shaw 平行板模型中开展了空气驱替颗粒悬浮液的可视化实验,探究了不同流量、板间距和颗粒粒径条件下颗粒的滞留行为,发现了颗粒无滞留、颗粒成簇滞留及颗粒均匀分散滞留3 种模式.在实验的基础上,结合液膜理论和气-液界面处流场特征分析,推导建立了颗粒滞留的判别准则,揭示了受毛细数和间距粒径比控制的颗粒滞留行为机制,并与实验结果对比验证了模型的有效性.
1 实验方法
1.1 多相流可视化实验装置
自主研发了多相流可视化实验装置,如图1 所示.该装置主要由矩形Hele-Shaw 模型、注射泵、相机和光源等组成.其中,矩形Hele-Shaw 模型由琉璃材质的透明长方体板、塞尺、止水夹板、进出口槽和金属外框架组合而成,两板的间距b0由塞尺的厚度决定.模型组装后的有效观测区域的长度L为100 mm,宽度W为13.2 mm,板间距b0等于塞尺的厚度(1,1.5,2 和3 mm).矩形Hele-Shaw 模型的几何结构固定,且流体的流动方向单一,因此常常作为基础研究的实验对象.

图1 多相流可视化实验装置Fig.1 Multiphase flow visualization system
Hele-Shaw 模型通过四氟乙烯管(内径2.5 mm,外径3.5 mm)与注射器(Hamilton,5~50 mL)相连,流体流动由高精度注射泵(Harvard 703007,注射体积精度 ±0.25%)驱动.根据实验设计,可实现注入/抽取流量从0.01 mL/min 到20 mL/min 的恒流量条件.流动模型竖向放置,在流动模型的前侧及后侧分别放置科研级相机(AVT,manta G-1236C)和LED面光源,相机的采集帧率为10 帧/s,采集图像的分辨率为57.4 μm.
1.2 材料物理性质
实验在常温环境(20 ± 0.5 °C)中开展,入侵相为空气(黏度和密度均可忽略),被驱替相为颗粒悬浮液.悬浮液中液相为二甲基硅油(阿拉丁),颗粒采用单分散聚乙烯非荧光颗粒(Cospheric Inc),两者密度基本相同.二甲基硅油对琉璃壁面和聚乙烯颗粒为强湿润性[40],因此颗粒可以均匀地分散于硅油中.如图2 所示,基于液滴形状分析仪(Kruss,DSA25)测试了纯硅油与颗粒悬浮液对于本实验琉璃材质模型的接触角,其静态接触角小于10°,且液体中颗粒存在对接触角不产生影响.实验中采用粒径为180~212 μm 的颗粒,即悬浮液SUS-196.颗粒密度为ρp=0.98 g/cm3,悬浮液中颗粒的体积分数(浓度)均为ϕ≈ 20%.硅油黏度为μf=200 mPa·s,密度为ρf=0.97 g/cm3,界面张力为σ=21 mN/m.

图2 接触角测量Fig.2 Contact angle measurements
1.3 实验步骤及图像后处理
按照实验设计配置颗粒悬浮液,然后将悬浮液以5 mL/min 的流量注入模型,使其充满.随后,固定抽取流量开始实验,通过相机记录整个驱替过程的图像.当驱替界面达到可观测区域底部时,实验结束,并记录从开始至结束的时间为突破时间tbt.在实验结束后,通过超声波、等离子清洗机、酒精和超纯水对模型进行清洗.
通过自编译的MATLAB 程序对灰度图像进行二值化处理,并采用中值滤波方法过滤图像中的噪点.为了定量评价颗粒的滞留程度,本文定义了颗粒滞留系数,其可表示为
式中,Sdep为颗粒滞留系数,Ainv和Ap分别为突破时刻入侵相(空气)和滞留颗粒相所对应的二值化平面面积.
此外,指进尖端速度是计算毛细数Ca、雷诺数Re等中的重要参数.通过对一组驱替过程图像的二值化处理,可得到一个时间步Δt内尖端距离的变化值ΔLtip,从而求得该时间步内的平均速度为
将该平均速度与根据实验设定流量求得的速度进行对比,两者结果基本相同,验证了本文实验控制与图像后处理技术的有效性.
2 实验结果分析
2.1 空气-悬浮液驱替模式
图3 首先给出了3 种不同的空气驱替悬浮液流动过程,其中空气为非湿润驱替相,而颗粒悬浮液为被驱替相,气-液界面从上向下推进.当两板间距一定时,在小流量条件下界面平直推进,被驱替的湿润相在边壁上残留一层液体薄膜,驱替过程基本为完全驱替,即表明驱替处于在毛细力和重力主导的稳定模式,如图3(a)所示.残留的液体薄膜为颗粒滞留的发生提供了必要条件;随着流量的增加,驱替界面仍基本平直,驱替为稳定模式,但残留的液体膜厚增大;当液体膜厚达到一定条件时,颗粒滞留发生,如图3(b)所示.当流量进一步增大时,不稳定黏性指进出现,驱替处于黏滞力主导的不稳定模式,且伴随着更加均匀的颗粒滞留,如图3(c)所示.
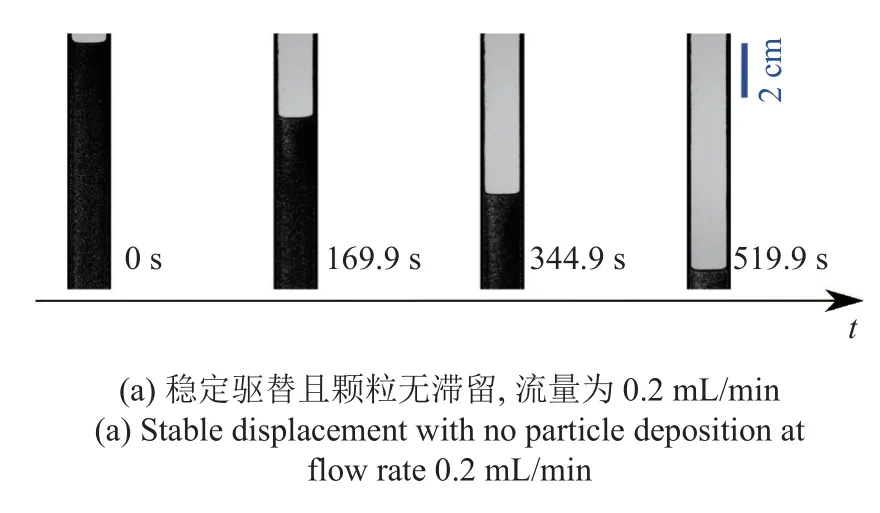
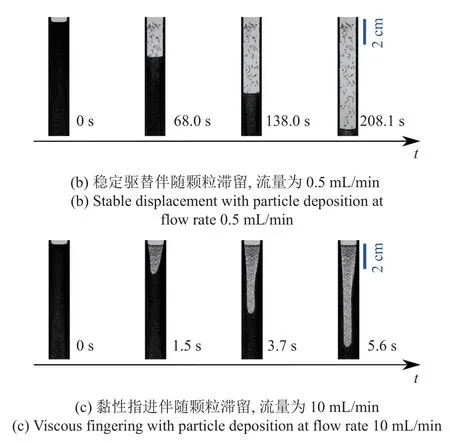
图3 板间距1.5 mm 条件下空气-悬浮液驱替模式Fig.3 Gas-suspension displacement patterns at gap 1.5 mm
2.2 不同实验条件下颗粒的滞留模式
为了分析颗粒的滞留行为,系统开展了不同板间距、流量条件下的空气-悬浮液驱替流动可视化实验,如图4 所示.为了进一步定量评价颗粒的滞留程度,根据式(1)计算了不同实验条件下颗粒滞留系数,如图5 所示.当颗粒不发生滞留时,滞留系数Sdep为0.当颗粒发生滞留后,Sdep整体上随着板间距的增加而增大;而在相同板间距的条件下,随着流量的增加,Sdep表现为先快速增大而后趋于稳定(缓慢增加或略微减小)的变化趋势,即反映了气-液驱替过程中颗粒存在不同的滞留模式,此时滞留系数Sdep的变化趋势与颗粒滞留模式有关.

图4 不同板间距、流量下颗粒滞留实验相图Fig.4 Experimental phase of particle deposition under different gaps and flow rates
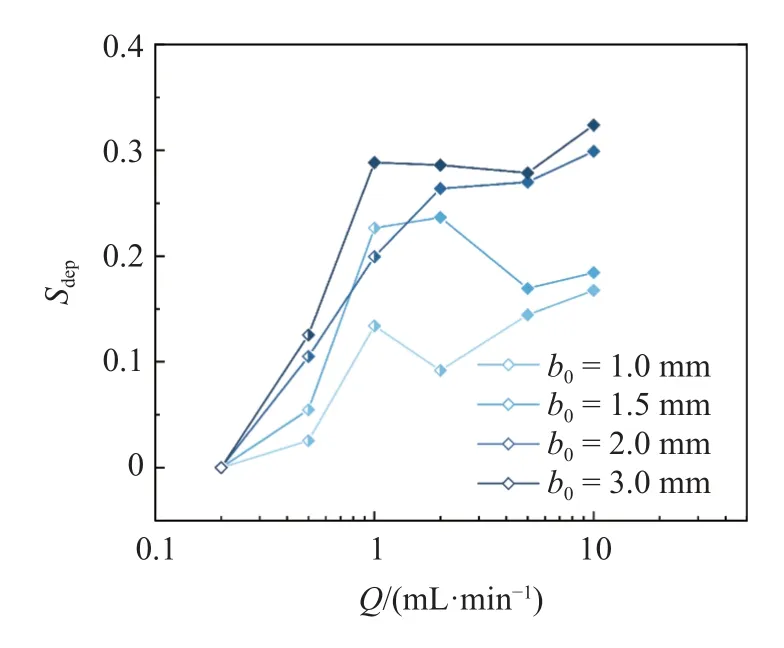
图5 滞留颗粒体积分数Fig.5 Volume fraction of deposited particles
如图6(a)所示,当流量较小时,颗粒聚集成团簇来抵御界面的毛细过滤作用,即颗粒滞留表现为团簇滞留形态.随着流量的增加,残留的液体薄膜亦增加,毛细过滤作用减弱,颗粒以单个分散或小团簇形态滞留,此时Sdep随着流量的增加而快速增加.如图6(b)所示,随着流量的进一步增加,毛细过滤作用基本消失,此时颗粒滞留主要表现为均匀分散的滞留形态,Sdep基本趋于稳定.
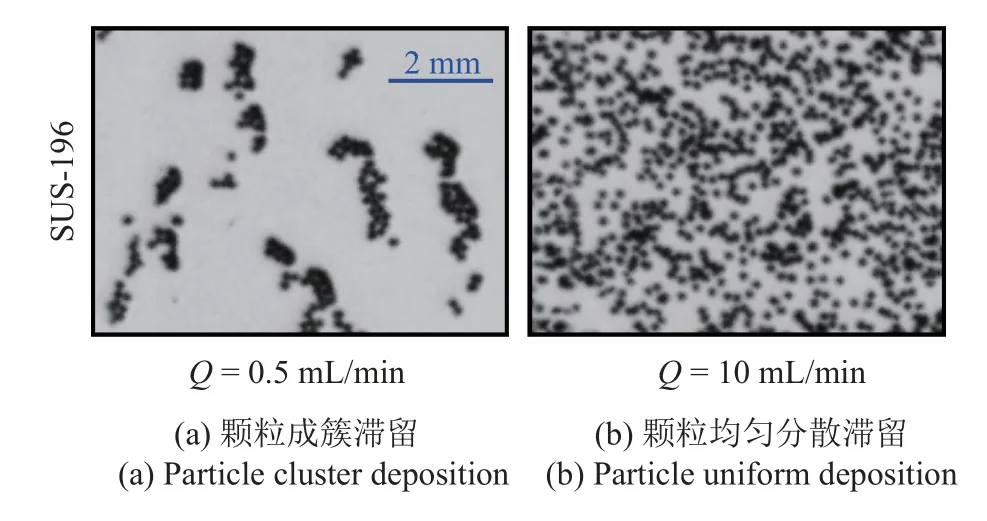
图6 颗粒滞留局部放大图,板间距为3 mmFig.6 Enlarged view of particle deposition at gap 3 mm
根据图4 的结果,结合颗粒滞留形态分析,将颗粒滞留划分为3 种模式,即颗粒无滞留(R1)、颗粒成簇滞留(R2)以及颗粒均匀分散滞留(R3).图4 中红线和蓝线分别为滞留模式R1,R2 和滞留模式R2,R3 的分界线,而在图5 中空心、半实心和实心符号分别代表3 种滞留模式R1,R2 和R3.从图4 中可以看出,颗粒滞留行为与板间距、流量等因素均有关.首先,在一定开度条件下,随着流量的增加,颗粒从无滞留模式向成簇滞留模式、均匀分散滞留模式转变.其次,颗粒均匀分散滞留的临界流量随着板间距增大而减小,即流量越大、板间距越大,颗粒越易发生滞留.随后,本文基于液膜理论和流场分析建立颗粒滞留的判别准则,并与实验结果对比,来验证判别准则的有效性,并最终揭示颗粒滞留的控制机制.
3 理论分析
3.1 悬浮液等效黏度
颗粒与周围流体的相互作用决定了悬浮液的表观(等效)黏度,其主要与流体黏度和颗粒浓度有关,具体可表示为[41]
式中,μequ为悬浮液的等效黏度,μf为悬浮液中液体的黏度,ϕ为悬浮液中颗粒的体积分数,ϕmax为颗粒填充的最大体积分数,一般取ϕmax=0.62[30,42].在本次实验条件下,根据式(3),可求得颗粒悬浮液的等效黏度为352.2 mPa·s.
3.2 残留液膜厚度
在不混溶两相(如气-液两相)排水驱替过程中,被驱替的湿润相会在边壁上残留一层液体薄膜,这为颗粒滞留的发生提供了必要条件.薄膜的厚度与流体的性质、通道的几何尺寸和界面速度有关,其取决于黏滞力、毛细力、重力之间的竞争.本文实验中重力相对于毛细力的作用较小(邦德数Bd=ρfgb02/(4σ) ≤ 1),此时理论模型中可暂不考虑重力对弯液面形状和薄膜厚度的影响[43].当毛细数Ca远小于1 时,1961 年Bretherton 首先建立了薄膜厚度hfilm与毛细数Ca和流动通道之间的关系.当气体驱替牛顿流体时,文献[37,44]根据大量的实验数据,在Bretherton 模型的基础上提出了可适用毛细数Ca≤2 的经验公式,其可表示为
式中,毛细数为Ca=μequvtip/σ,其中尖端速度vtip和等效黏度μequ分别根据式(2)和式(3)求得.需要说明的是,当Bd较大且重力对弯液面形状有较大影响(如Hele-Shaw 模型水平放置)时,薄膜厚度hfilm为毛细数Ca与邦德数Bd的函数[43,45].
3.3 颗粒滞留的判别准则
在液膜理论的基础上,进一步分析驱替界面后流场特征与颗粒运动,从而提出颗粒滞留的判别准则.如图7 所示,当液体薄膜存在时,驱替界面后的涡旋流场可分为两个区域,即流体流入薄膜的区域Ω1和主体内的涡旋流区域Ω2.颗粒滞留发生的过程为颗粒首先进入了Ω1区域并与气-液界面产生接触,逐渐使界面产生变形,最终被夹带在液体薄膜中.此时,颗粒滞留主要由界面毛细力(FC)、流体拖曳力(FD)和底部摩擦力(Ff)之间的竞争控制,其中拖曳力为驱动力,而毛细力为阻碍力.而当颗粒在Ω2流动区域时,颗粒会循环到被驱替液体中或与界面接触产生扰动,但不发生滞留.因此,颗粒滞留发生的关键在于颗粒能够进入Ω1流动区域,此时流动区域Ω1和Ω2的分界点位置为关键参数.如图7(a)所示,本文将该分界点定义为界面驻点,该点距边界的高度定义为h*.基于润滑理论,可求得h*为[33]

图7 颗粒滞留示意图Fig.7 Schematic diagram of particle deposition behavior
式中,lcap为表征流体所受表面张力与重力相对大小的毛细长度,lcap=[σ/(ρg)]1/2.一般情况下,薄膜厚度hfilm远小于毛细长度lcap,因此上式可取h*≈ 3hfilm.基于上述分析,进一步提出颗粒滞留的几何判据为
式中,Rp为颗粒的半径;α为滞留几何系数,反映了颗粒滞留发生时颗粒粒径与界面驻点液膜厚度的关系.其中,α=1 是颗粒沿着流线进入区域Ω1的临界条件,因此为颗粒滞留的下边界条件.当α=2 时,颗粒进入薄膜区域Ω1后不会使界面变形,此时界面对颗粒的毛细阻碍力为0,因此为颗粒滞留的上边界条件[37].
结合式(4)、式(5)和式(6),可最终推得颗粒滞留发生的临界毛细数Cadep,即颗粒滞留的判别准则可表述为
3.4 结果对比
如图8 所示,将图4 中不同流量和板间距条件下空气驱替颗粒悬浮液的实验结果归纳到以毛细数Ca和间距粒径比b0/Dp为横、纵坐标的相图中,并根据式(7)求得判别颗粒滞留的理论曲线.图8 中方形符号、圆形符号和三角形符号分别代表3 种颗粒滞留模式的实验结果,红色和蓝色虚线分别为α=1和α=2 时的理论曲线.从图中可以看出,下边界条件α=1 准确地捕捉了颗粒滞留的发生,因此可作为颗粒发生滞留的临界判别条件.上边界条件α=2 准确地预测了颗粒成簇滞留(R2)向颗粒分散均匀滞留(R3)的转变,此时界面的毛细过滤作用基本消失,即颗粒可以无阻碍地滞留在液膜中.因此,上边界条件α=2 可作为颗粒均匀滞留的临界判别条件.此外,我们同样开展了不同粒径条件(355~425 μm)下空气-悬浮液驱替实验,结果表明其滞留行为随流量和板间距的变化具有相同演变规律,且同样可基于本文理论曲线预测;在相同板间距条件下小粒径颗粒发生滞留的临界流量更小,即小粒径颗粒更易滞留.由于分析内容重复,文中不再过多阐述.
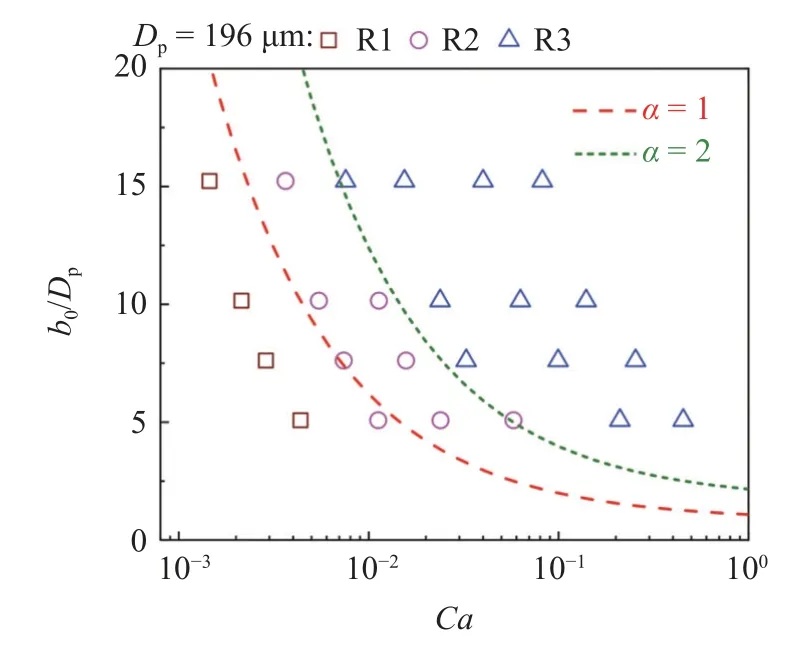
图8 颗粒滞留行为的实验与理论结果对比Fig.8 Comparison between experimental and theoretical results of particle deposition
综上所述,理论结果与实验结果吻合较好,即表明了理论模型的有效性.根据理论模型可以得出,颗粒滞留行为由流体性质、流速、板间距和颗粒粒径等因素共同决定,其可归结于通过毛细数Ca和间距粒径比b0/Dp进行调节控制,从而揭示了颗粒滞留行为的控制机制,这为今后的工程实践提供了重要的理论基础.
4 结论
本文基于自主研发的矩形Hele-Shaw 模型-注射泵-相机多相流实验装置,系统开展了不同流量、板间距和颗粒粒径条件下空气驱替颗粒悬浮液的可视化实验,并结合理论分析,研究了驱替过程中颗粒的滞留行为.本文得到主要结论如下.
(1) 在空气-悬浮液驱替流动过程中,驱替界面存在稳定和指进不稳定模式,并可伴随颗粒滞留的发生.
(2) 根据滞留形态特征,将颗粒滞留划分为无滞留、成簇滞留及均匀分散滞留3 种模式,其与板间距、流量、颗粒粒径等因素有关.随着流量的增加、板间距的增大或粒径的减小,颗粒从无滞留模式向成簇滞留模式和均匀分散滞留模式转变,即流量越大、板间距越大以及粒径越小,颗粒越易滞留.
(3) 边壁上残留的液体薄膜为颗粒滞留的发生提供了必要条件.基于液膜理论和气-液界面处流场特征分析,提出了颗粒滞留的判别准则,并与实验结果进行了对比验证.该准则揭示了受毛细数和间距粒径比控制的颗粒滞留机制,为实现颗粒运移控制提供一定的理论基础.
