无人机机载激光雷达技术在电力工程中的应用分析
2023-12-14陈西强
陈西强
(中国电建集团福建省电力勘测设计院有限公司,福州 350003)
0 引言
机载激光雷达技术已广泛应用于铁路勘测、地形测绘、电力工程等众多领域[1-4],主要通过有人机进行大范围的地形地貌数据采集,同时获取地表影像、激光雷达回波数据,结合机载GNSS 数据、IMU 惯导数据、基准站数据,得到融合解算后的高精度轨迹数据。由此与机载激光雷达数据进行融合解算,得到具有三维空间信息的点云数据,并通过专业软件进行点云数据滤波和分类,得到最终的目标三维数据。该方法能够快速获取大范围的地表高程数据,效率高,精度好,能够满足1∶2000 及以下的地形图测绘需求。但也存在前期准备工作长、工序复杂,且设备昂贵等缺点,对飞行平台具有严格的技术要求。
近几年随着无人机技术的长足发展及激光雷达小型化、轻量化的出现,给无人机机载激光雷达提供了良好的实践机遇,本文通过无人机机载激光雷达技术在电力工程的应用实践,分析其在电力工程中所能达到的精度及应用可行性,并结合工程实践,总结其应用技术要点,为今后无人机机载激光雷达技术在电力工程的应用提供借鉴意义。
1 无人机机载激光雷达技术应用
无人机机载激光雷达主要包括无人机飞行平台和机载雷达荷载两个部分,其中搭载激光雷达设备的无人机飞行平台主流的有旋翼无人机和固定垂起复合翼无人机两种,其续航时间、起飞重量一般有限,要求机载激光雷达设备在5kg 以内。目前国内所采用的大部分为短测程在400m 以内和长测程为1000 至1500 之间的激光雷达,但长测程激光雷达设备较为昂贵,主要用于大范围地形点云获取的应用场景,如山区长距离的输电线路巡检业务,而短测程激光雷达主要用于变电站、光伏等小范围的地形测图业务。
无人机机载激光雷达技术在电力工程中的应用主要包括电力线路巡检、电力线路设计与优化、变电站站址小范围测图等,其生成流程包括项目准备、无人机激光雷达飞行、数据预处理、点云解算及点云分类、质量控制与精度检核,生成DEM 数据并提交成果,其生成流程如图1 所示。

图1 无人机机载激光雷达技术应用流程
项目准备阶段包括航飞计划的备案、飞行方案设计、人员与设备安排及测区踏勘,其中飞行方案设备根据测区范围特点可布设为多边形或者带状,飞行方式可采用常规飞行或交叉飞行。常规飞行模式主要用于线路两侧一定带宽内的点云数据获取,在航高、重叠度控制下,点云密度能够较好地达到设计要求,而交叉飞行主要用于小范围地形测图及变电站三维点云数据的获取,较常规飞行其飞行时间相对长,点云密度高,且均匀性好。
无人机机载激光雷达飞行主要根据飞行方案,由无人机搭载激光雷达荷载进行自动巡航式飞行,其位置由高精度GNSS 及IMU 进行控制,能够快速获取测区内高密度的三维激光雷达数据。
基于无人机机载激光雷达飞行所获得的机载激光雷达数据进行数据预处理,主要包括飞行差分GNSS 数据处理,飞行轨迹POS 的解算,获取高精度轨迹数据。
点云解算及点云分类是点云数据处理的核心处理过程,结合数据预处理后得到的高精度飞行轨迹数据和机载激光雷达数据,通过专业软件进行点云解算。解算成功后进行点云去噪及坐标转换,得到相对干净的具有绝对坐标的三维激光点云数据,并对点云进行赋色。赋色可通过无人机自行拍摄的照片或获取影像生成的DOM 进行。在此基础上进行点云分类细化处理,采用自动分类与人工分类相结合的方式将地面点、植被、房屋等感兴趣的点进行精细化分类处理,并输出标准的LAS 格式。最后将输出后的LAS 格式点云数据导入Googlemapper 专业软件中,生成所需要的DEM 数据。
质量控制主要是对点云数据的密度、条带拼接误差、完整性进行内业质量控制,同时通过野外RTK 所采集的地面特征点及裸露位置的地面高程点,对点云数据进行高程和平面精度的检验。在满足设计方案要求时,方可提交最终的DEM 供项目使用。
2 工程应用分析
2.1 线路工程应用分析
电力线路工程主要呈带状分布特征,且大部分在远离人口密集区域,植被相对茂密,采用无人机机载激光雷达技术可以快速获取线路走廊内地表高程数据,相比常规无人机航测技术,能够通过激光发散及回波穿透稀疏植被,满足线路勘测设计要求。以某220kV 线路工程为例,采用D2000 四旋翼无人机搭载机载激光雷达设备进行线路设计走廊类带宽为500m 的点云数据获取,航飞相对高度为150m,采用变高飞行模式,航线重叠度为45%,飞行后采用无人机管家智激光模块进行飞行轨迹融合机载激光点云的数据解算,去噪后得到高密度激光点云数据,如图2 所示。

图2 高密度三维激光点云数据
在此基础上,通过智激光模块进行点云分类和人工去噪,最后生成线路平断面图所需的高精度数字高程模型DEM,如图3 所示。
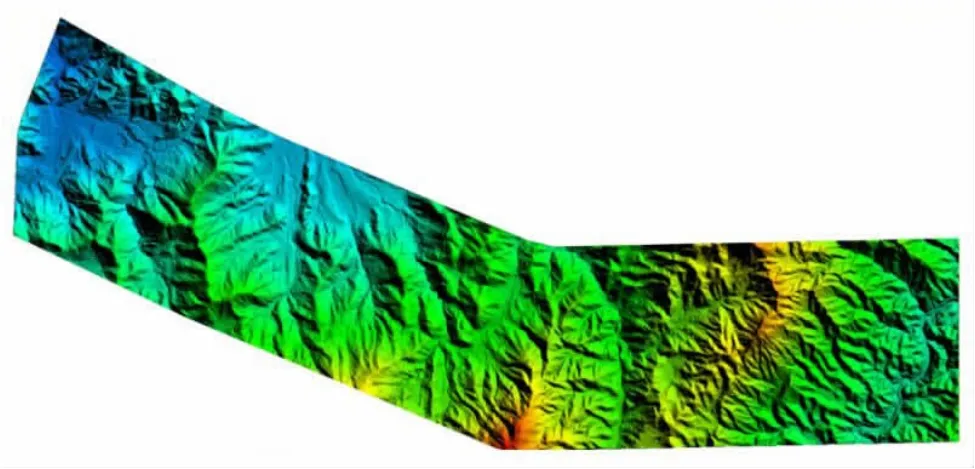
图3 线路走廊内的DEM 数据
通过野外RTK 对该区域内裸露的平坦、有明显特征的地物进行数据采集,将其与无人机机载激光雷达所获取得的DEM 数据进行比较分析,其高程较差对比分析如图4所示,高程较差绝对值分布如图5所示。
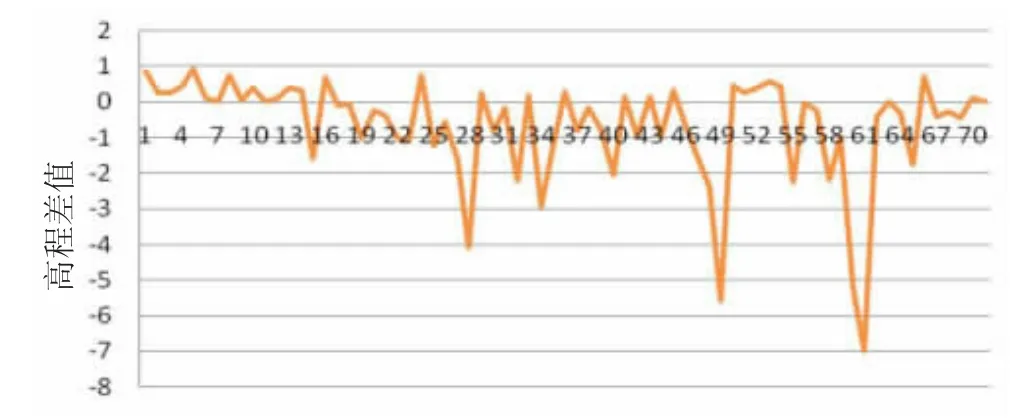
图4 RTK 与激光点云数据高程较差

图5 RTK 实测高程与机载激光雷达点云数据高程较差绝对值分布
根据1:2000 地形图数字高程模型中误差精度要求,即丘陵地区限差1m,山地限差2.4m,高山地限差3m。由图4 图5 可知该线路工程无人机机载激光雷达点云数据处理所生成的DEM 数据与实测高程数据较差在1m 以内的达到73%,2.4m-3m 之间的在18%,2.4m-3m 较差在3%,大于3m 较差的占3%,根据现场地形条件分布可知,满足1∶2000数字高程模型精度要求的比例占94%,现场局部区域由于树木茂密差值可达到7m,属于缺乏地面点造成,针对此局部区域现场已加强野外数据校测工程。由此可知本次由机载激光雷达点云数据处理所生成的DEM 数据质量可靠,满足1∶2000 数字化地形测量高程精度要求,局部林木高密地区加强测量点校测。
2.2 变电工程应用分析
变电站工程主要呈块状区域,具有范围小、植被茂密等显著特点,在勘测设计阶段,主要为设计提供大比例尺地形图,为变电站总平布置设计提供基础数据。本文以某变电站扩建工程为例,采用无人机激光雷达技术,飞行高度为150m,航线设计为交叉飞行,飞行时间为20 分钟。飞行后采用无人机管家智激光模块进行飞行轨迹融合机载激光点云的数据解算,去噪后得到高密度激光点云数据,如图6 所示,其密度高达36.560 个/m2,如图7 所示。
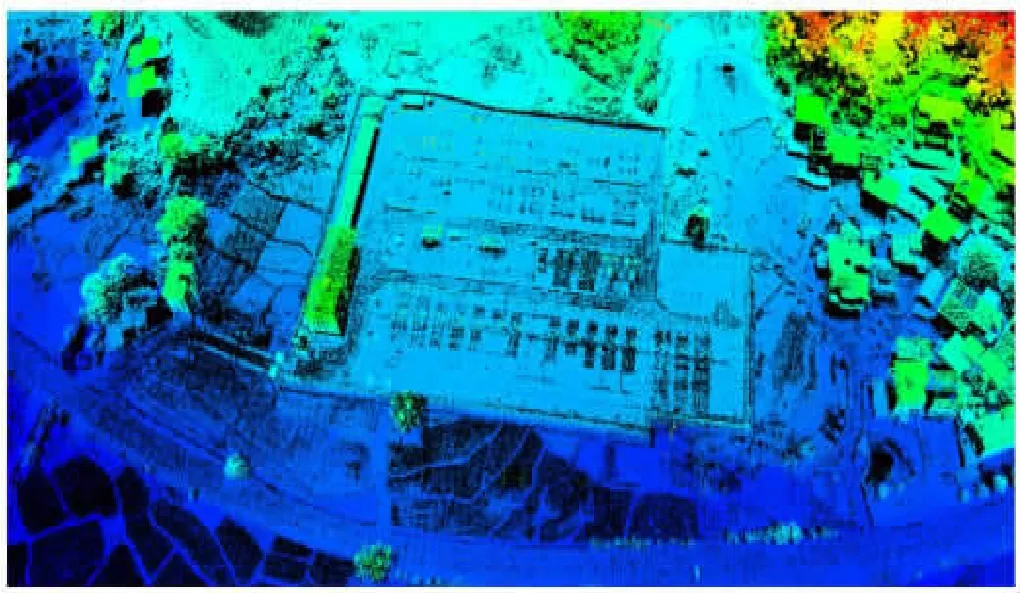
图6 某变电站高密度点云数据
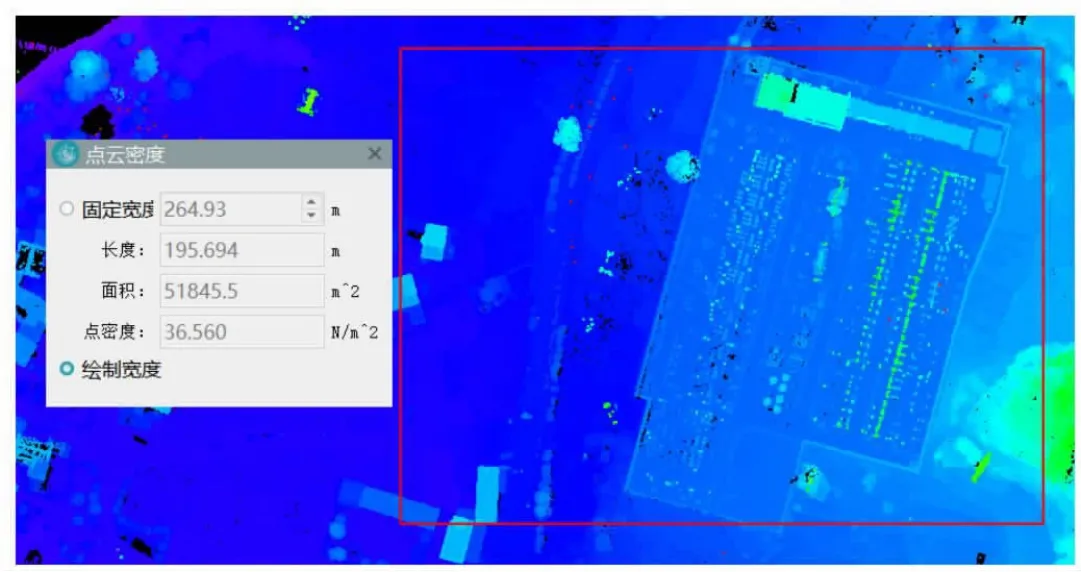
图7 某变电站区域点云密度
经过人工去噪与点云分类后,得到相对干净的激光点云数据,并输出生成DEM,通过野外RTK 数据采集对其进行精度检核比较,如图8 所示,分析可知,地表裸露的地方其精度最小为0.004m,最大为0.136m,总体中误差为0.059m,满足1∶500 地形图测图高程限差的规范要求。

图8 野外数据精度校核
3 结论
通过无人机激光雷达技术获取自然地表三维空间信息,为电力工程勘测提供了新的技术方案,能够快速地得到设计所需要的DEM 数据,具有效率高、精度好、现实性强等显著特点,广泛应用于电力线路优化选线、路径排位、变电站站址测图及电力三维数字化等。
在山区植被茂密区域,通过变高飞行,能够快速获取满足1∶2000 数字化地形测量高程精度要求,但也存在部分茂密林区植被穿透有限,需要在野外定位过程中对局部林木高密地区加强测量点校测。
变电电站应用过程中,通过合理飞行方案设计,采用交叉飞行,能够提过点云密度及其均匀性,在地表植被稀疏区域,能够满足1∶500 地形图高程测量要求。但在地形变化剧烈如陡坎等区域,存在误差超限的情况。因此在实际工程应用中,应在测区均匀采集特征点,用于后期数据处理过程中的无人机激光点云数据精度验证,为点云数据人工去噪提供实测依据。
