多桨倾转旋翼飞行器地面/地面耦合非定常流场特征研究
2023-12-13张文康苏大成黄水林
张文康,苏大成,黄水林
(中国直升机设计研究所 直升机动力学全国重点实验室,江西 景德镇 333001)
0 引言
多桨倾转旋翼飞行器是一款利用分布式概念的新型旋翼飞行器[1-4]。该构型在结合直升机和固定翼飞行器优点的基础上,还能够充分发挥电驱动带来的优势,因此在军用和民用领域应用前景十分广阔。国外很早便开展了电动倾转旋翼机的研究[5-7],并研制出GL-10、“雷击”、VAHANA等型号。近年来,随着电动航空的兴起,国内也开始对该构型展开研究,并进行了原理样机的研制和试飞。然而,国内外公开的飞行数据表明,多桨倾转旋翼飞行器以直升机模式在近地面飞行时,多旋翼/机身/地面之间的强气动干扰,会使其姿态会出现非定常波动。因此,开展地面效应下多桨倾转旋翼飞行器非定常气动特性研究对于该构型的近地面安全飞行具有重要意义。
国内外对旋翼地面效应已有了较多的研究。早期,Fradenburgh[8]就发现了旋翼在近地情况下性能会得到提高,并描述了尾迹如何打到地面后沿地面向外延伸然后卷起的现象。Fradenburgh还发现了桨盘根切处的流场会向桨盘上方流动。1977年,Sheridan[9]通过风洞试验获得了不同飞行状态下旋翼近地面飞行时气动力的变化。Wadcock[10]等人运用试验和CFD方法发现,在地面效应下,UH-60旋翼桨盘中部有明显的不稳定流场和上升流场。
近些年,随着eVTOL的发展,关于多旋翼之间的气动机理研究也逐渐得到重视。研究发现在地面效应的影响下,多个近距离旋翼间会产生独特的气动特征。Gupta[11]等人使用虚拟盘模型发现,四旋翼飞行器在近地情况下旋翼间的流场有非常强的非定常干扰。Miesner[12]等人使用CFD对有18副旋翼的GL-10进行仿真模拟,发现离地越近,旋翼拉力波动越大。Kutz[13]等人使用CFD模拟地面效应时发现,旋翼拉力增加了21%,并且出现了载荷振荡现象。国内的康宁[14]等人采用动量源RANS方程得到了前飞地面效应下共轴双旋翼的流场形态。覃燕华[15]等人建立自由尾迹模型,计算共轴双旋翼地面效应下的气动特性和诱导速度。
上述研究为深入认识地面效应下的多桨倾转旋翼飞行器的气动特性提供了良好的基础。然而这些研究大多集中在常规旋翼的非定常载荷研究,对于旋翼载荷波动引起的全机姿态的波动问题没有较深入的探索;研究方法大多使用求解RANS方程动量源方法,不能有效捕捉到旋翼流场细节。
鉴于此,本文以简化多桨倾转旋翼飞行器模型为研究对象,拟对多桨倾转旋翼飞行器地面效应下的复杂干扰特征进行研究。选用嵌套网格DES方法和动量源RANS方法相结合的方法对地面效应下多桨倾转旋翼飞行器进行数值模拟。着重研究涡量场、速度场以及非定常气动载荷特征,从而分析流场的空间特性对全机姿态的影响,以期望得出一些地面效应下多桨倾转旋翼飞行器有意义的结论。
1 数值方法与算例验证
1.1 数值方法
本文采用商用Fluent软件对多桨倾转旋翼飞行器进行数值计算。多桨倾转旋翼飞行器构型独特,有前后各4副旋翼,分布式排列,存在旋翼/旋翼之间的干扰和旋翼/机身/地面的干扰,其流场环境非常复杂。传统RANS方法耗散性比较强,无法对旋翼卷起的尾流进行高保真的模拟。DES能够高精度模拟地面效应下的非定常载荷特征,但是DES对网格数量要求较高,计算周期长,效率低。因此,在方法选择上,先使用RANS方法对流场进行初始化求解,待流场充分发展后再使用DES方法对计算数据进行输出。
主控方程:

(1)

采用有限体积法求解上述控制方程。在空间离散上,无黏通量采用基于有限差分的二阶Roe格式;时间推进采用 LU-SGS 隐式格式,具有二阶精度。采用全湍流假设,湍流模型采用SSTk-ω方程模型。物面边界条件采用无滑移绝热壁面条件。
考虑多桨倾转旋翼飞行器独特的构型,有前后各4副旋翼、分布式排列,本文拟将靠近机身的4副推力桨使用运动嵌套网格方法,外面的4副升力桨用动量源方法。使用两种方法的原因是一方面受限于计算条件,另一方面靠近机身的推力桨受干扰更严重,嵌套网格能更好地捕捉到流场细节。先采用RANS方法初始化流场,然后使用DES方法进行数据的输出。
1.2 算例验证
为了验证本文所用的动量源方法和嵌套网格方法的有效性,选取有试验数据的GIT旋翼/机身干扰试验为算例。该试验构型选取两片桨叶,翼型为NACA0015,展弦比为5.3,桨尖速度为0.295马赫数,总距10°,机身轴线位于桨盘中心下方0.26弦长处。
图1和图2分别给出了动量源等值涡量云图和嵌套网格等值涡量云图。通过算例计算得到机身四个检测位置处压强系数的分布曲线,其中底端和右端线是运用动量源方法计算得到的,顶端和后端是运用嵌套网格方法得到的数据。通过与试验值对比,如图3所示,可看出动量源法和嵌套网格方法计算得到的压强系数与试验结果吻合良好,从而表明了本文所用方法的可靠性,适用于多桨倾转旋翼飞行器气动特性的数值模拟。
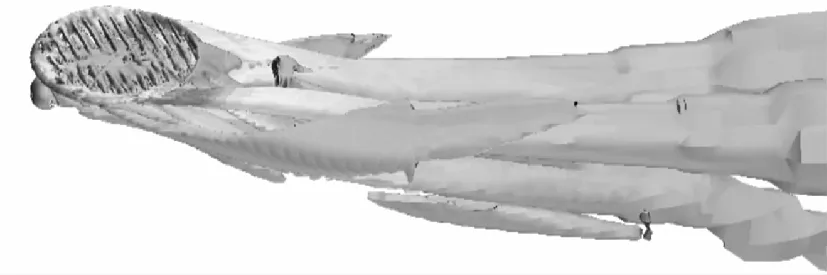
图1 动量源等值涡量云图
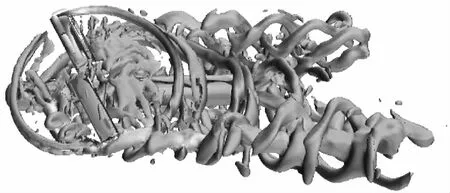
图2 嵌套网格等值涡量云图
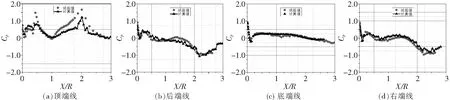
图3 机身表面各监测线压强系数与试验值对比
2 结果与分析
2.1 计算模型与网格划分
本文采用的多桨倾转旋翼飞行器简化模型如图4所示,包含机翼、机身、端板和短舱。重心位于坐标系原点处,x轴指向机身尾部,y轴指向右侧,z轴竖直向上。全机基本参数见表1,推力桨桨叶采用NACA4412系列翼型,推力桨桨叶采用贴体网格,网格随桨叶旋转做刚体运动。
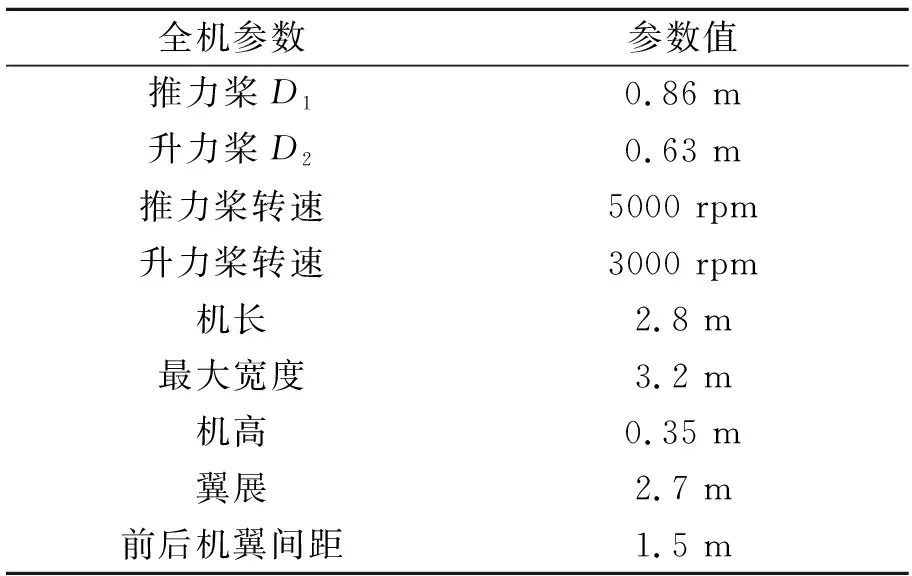
表1 全机基本参数

图4 计算模型
本文重点研究地面效应下旋翼间的气动干扰,离地高度为H/D1=0.85,背景网格边界条件设置地面为壁面,其它为压力出口。如图4所示,利用商用软件生成非结构网格,棱柱层数为10层,近壁层厚度为0.001 m。图5和图6分别给出了嵌套网格与背景网格截面和动量源网格截面。机体网格内密外疏,机体附近网格较密,桨叶块网格与背景网格尺寸大致相当,单片嵌套桨叶网格单元数量为50万个,背景网格单元数为601万个。采用主频2.2 GHz工作站20核并行计算,每个时间步旋翼旋转1°,单个时间步为3.3E-5 s。
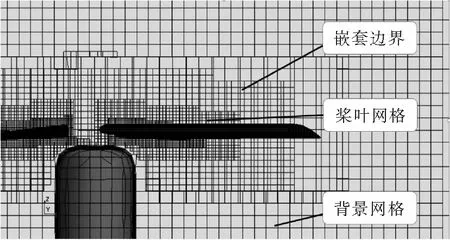
图5 嵌套网格与背景网格截面
2.2 地面效应下非定常气动干扰特征
对于多桨倾转旋翼飞行器,由于它特殊的构型,有多副旋翼共同产生和控制拉力,旋翼之间的距离又比较近,会有很强的非定常干扰,特别是在地面效应下。
图7分别给出了动量源方法下升力桨拉力时间历程变化曲线:在全机多桨情况下拉力出现了一种非定常脉冲式的波动,幅度达到了12.9%;而在孤立旋翼计算时拉力随圈数的增加表现得比较稳定。由图8嵌套网格方法下推力桨拉力时间历程变化曲线和孤立旋翼下拉力变化也可以观察到,推力桨拉力呈现非定常波动,波动幅度为15.6%,而在孤立旋翼时拉力较为稳定。如图9所示,地面效应下多桨倾转旋翼飞行器的全机滚转力矩、俯仰力矩和偏航力矩都受到了非定常干扰,其中全机的俯仰力矩和偏航力矩波动最为明显,分别为37.7%、43.7%,滚转力矩波幅比较小,为20.7%。
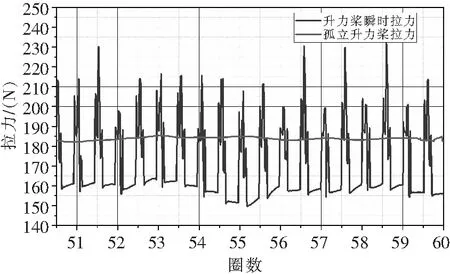
图7 升力桨拉力时间历程变化曲线
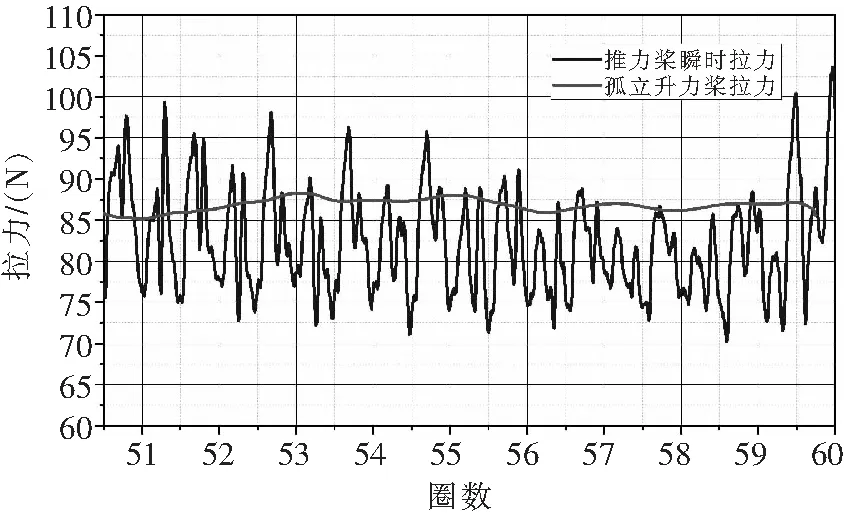
图8 推力桨拉力时间历程变化曲线
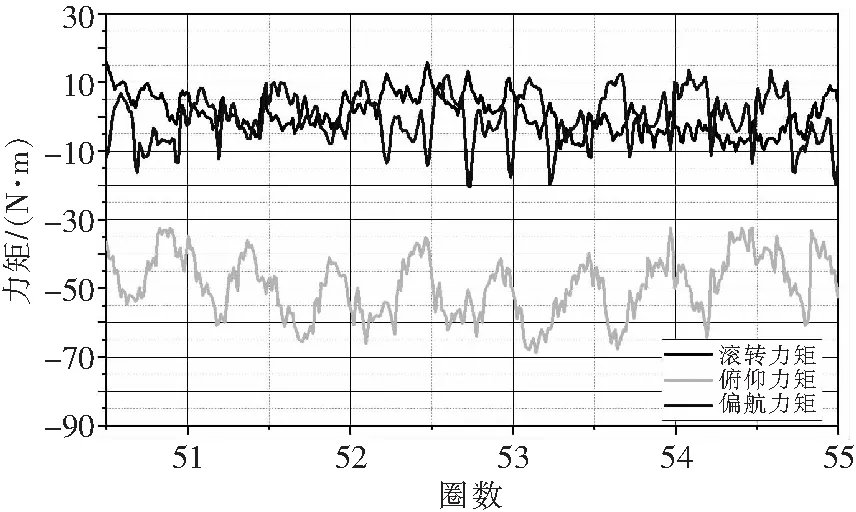
图9 全机力矩时间历程变化曲线
为分析载荷波动产生的原因,图10给出了全机等值涡量云图,图11和图12分别给出y=0.18平面和y=0.43平面的速度云图。从图10能看出,升力桨受到旋翼/旋翼/地面间的干扰,相同机翼上由于升力桨与推力桨之间的距离很近存在非定常干扰,力会在不同的相位方向上有波动,从而造成升力桨拉力出现非定常脉冲波动。从图10全机等值涡量云图和图11速度云图可以看到,前后旋翼桨尖涡离开桨尖后向下运动与地面碰撞,然后向四周扩散。其中部分气流向上卷起,在前、后旋翼之间卷起形成尺度更大的涡结构;然后该涡结构继续向上运动到桨盘上方,又被前、后旋翼重新吸收,从而造成了推力桨出现非定常波动。
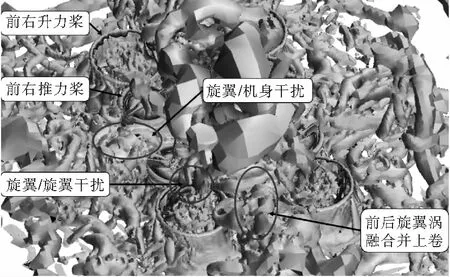
图10 全机等值涡量云图
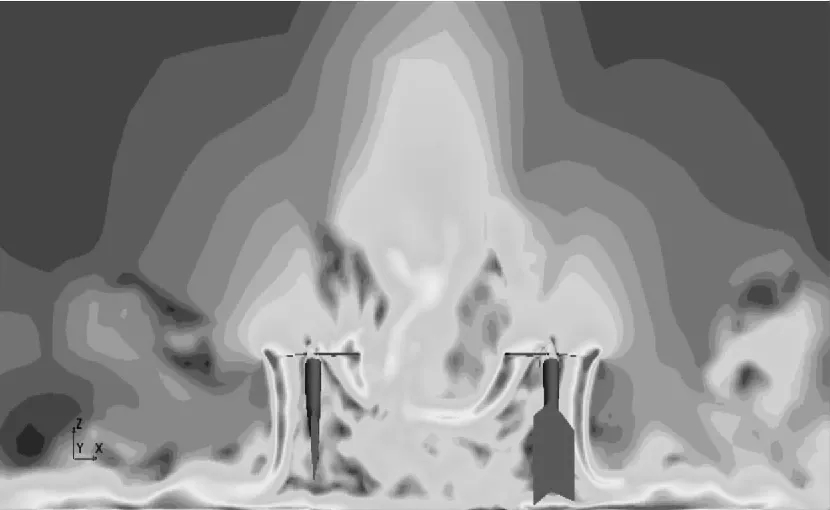
图11 y=-0.18平面速度云图
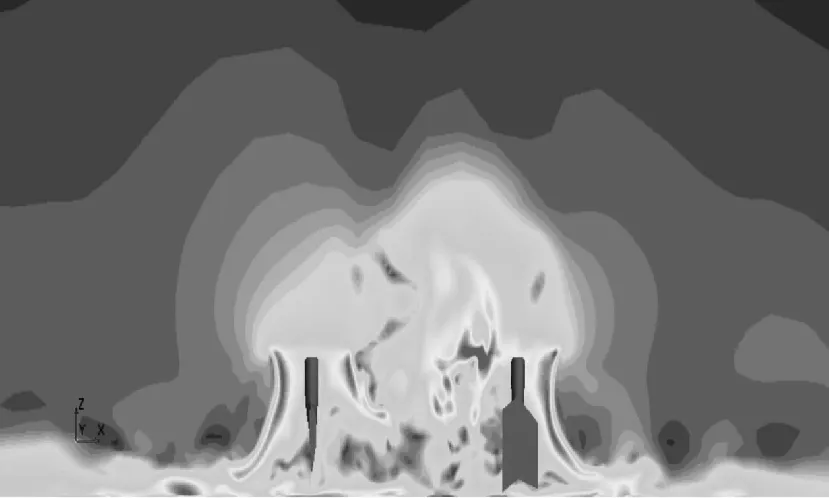
图12 y=-0.43平面速度云图
从图11和图12速度云图可以看出,由于推力桨和升力桨的半径不一致,旋翼之间合并的涡结构的大小和向上卷起的高度不一致,可进一步推测旋翼半径对涡的合并现象有影响。另一方面,对比图11和图12,也能说明运用动量源方法可以捕捉到地面效应下多旋翼之间的流动特征。
从图10能看出,由于悬停时旋翼尾迹从桨尖脱出后作用在了机翼上,造成了偏航方向载荷的波动。从图13不同时刻涡量云图可以看出,旋翼间形成的部分涡结构由于受到流动限制,无法径向移出,只能在前后机翼之间前后移动并作用在机翼上从而造成偏航力矩变化较为严重;俯仰方向上的波动是由于旋翼之间合并形成的涡结构在前后机翼之间前后移动,导致被前后旋翼吸入的时刻不一致,从而导致全机在俯仰方向出现非定常载荷波动。
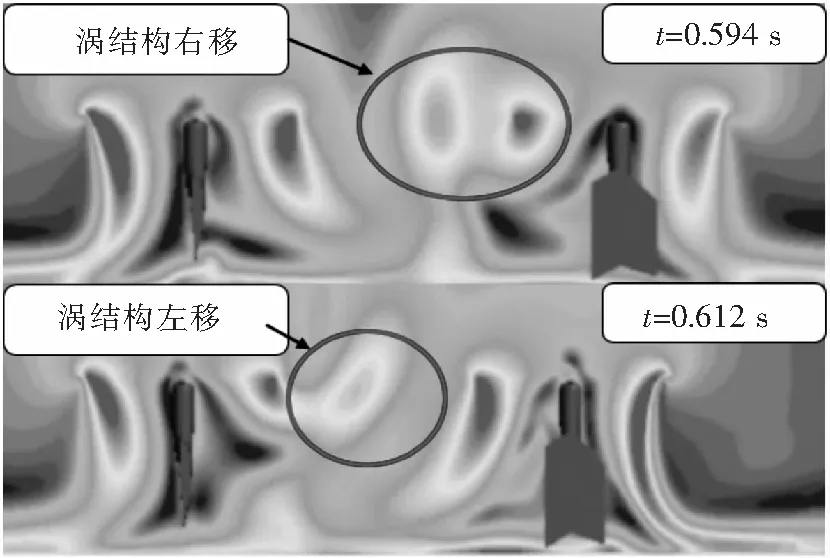
图13 不同时刻涡量云图
3 结论
本文采用DES方法来对旋翼/旋翼/机身/地面耦合流场进行高精度仿真,同时采用运动嵌套网格方法和动量源模型相结合的方法来分析旋翼尾流的影响。主要对地面效应下多桨倾转旋翼飞行器涡量场、速度场以及非定常气动载荷特征进行了分析研究,得到了以下结论:
1)地面效应下多桨倾转旋翼飞行器相同机翼上的两副旋翼存在非定常干扰,使旋翼拉力出现非定常波动,波幅达到12.9%。
2)地面效应下多桨倾转旋翼飞行器前、后旋翼桨尖涡向下运动与地面碰撞后,部分气流向上卷起,在前后机翼之间融合形成尺度更大的涡结构,该涡结构向上运动并被前、后旋翼重新吸入。
3)地面效应下前后机翼间形成的涡结构在前后机翼之间前后移动,导致被前后旋翼吸入的时刻不一致,从而导致全机在俯仰方向出现非定常载荷波动,波幅为37.7%。
