机器视觉在高空幕墙清洗中的应用与优化
2023-12-13黄俊生HUANGJunsheng
黄俊生 HUANG Jun-sheng
(凌度(广东)智能科技发展有限公司,广州 510000)
0 引言
随着城市建设的不断发展,高层建筑的数量不断增加,而这些高楼的外墙清洗一直是一项具有挑战性的任务。传统的清洗方式通常依赖于人工操作,存在诸多问题,如效率低、危险性高、水资源的浪费等。为了解决这些问题,机器视觉技术应运而生,为高空幕墙清洗任务提供了全新的解决方案。机器视觉技术以其高精度的图像识别和处理能力,使得清洗机器人能够更加智能地执行清洗任务。本文旨在研究机器视觉在高空幕墙清洗中的应用,并探讨如何通过技术创新来提高清洗效率、增强清洗安全性以及降低水资源的消耗。将详细介绍机器视觉技术的原理和在高空幕墙清洗中的关键应用领域,并着重阐述了技术创新点。通过本文的研究,希望为高空幕墙清洗领域的进一步发展提供有益的参考和指导。
1 研究目的
本研究旨在探讨机器视觉技术在高空幕墙清洗领域的应用,主要有以下两个目的:
1.1 提高自主性和清洗效率
传统的高空幕墙清洗方法通常依赖于人工操作,存在危险性和效率低下的问题。通过引入机器视觉技术,可以提高清洗机器人的自主性,使其能够更智能地感知和应对不同的清洗场景。研究将聚焦于如何利用机器视觉来识别墙面污渍、检测障碍物、规划清洗路径等方面,以实现清洗过程的自主性和高效性[1]。
1.2 优化清洗系统,实现节能环保
清洗过程中的水量消耗和污水排放是一个重要的环保和资源利用问题。本研究的另一个目的是优化机器人清洗系统,降低用水量和污水排放,从而实现节能和环保。研究将关注如何设计高效的污水回收系统、降低清洗所需的水量、减少清洗化学剂的使用等方面,以降低对水资源和环境的负荷[2]。
通过实现以上两个研究目的,本研究旨在为高空幕墙清洗提供更安全、高效和环保的解决方案,满足不断增长的市场需求和环境保护要求。
2 机器视觉在高空幕墙清洗中的应用
高空幕墙清洗领域的机器视觉应用是本研究的关键焦点,本节将介绍机器视觉技术的基本原理、在清洗中的作用、关键应用领域以及技术创新点。
2.1 机器视觉技术简介
机器视觉,又称计算机视觉,是一种模拟人类视觉系统的技术,通过摄像机和计算机处理图像信息,实现对视觉场景的感知和分析。该技术包括图像获取、图像处理、图像识别和模式识别等关键步骤。在高空幕墙清洗中,机器视觉技术可用于捕捉、分析和理解清洗环境的图像信息,从而使清洗机器人能够更智能地执行任务[3]。
2.2 机器视觉在高空幕墙清洗中的作用
机器视觉在高空幕墙清洗中发挥着关键作用,包括但不限于:环境感知与导航:通过分析环境图像,机器视觉可以帮助清洗机器人识别墙面污渍、玻璃状况和潜在障碍物,从而规划清洗路径和避免碰撞。任务执行监控:机器视觉可监控清洗机器人的任务执行,确保清洗过程按计划进行,及时检测并纠正可能的错误。安全保障:通过实时监测,机器视觉可以识别异常情况,如突发风雨等,以确保清洗机器人的安全操作[4]。
2.3 机器视觉的关键应用领域
机器视觉在高空幕墙清洗中有多个关键应用领域,包括:污渍识别与定位:机器视觉可以识别墙面上的污渍,确定清洗目标的位置和大小,以便精确清洗。障碍物检测与回避:通过分析图像,机器视觉可以检测到可能的障碍物,协助清洗机器人规避碰撞。路径规划与导航:机器视觉可以帮助清洗机器人规划最佳的清洗路径,确保高效完成任务[5]。
3 技术创新点
图1是幕墙清洁机器人的清洗装置的组成结构图,本研究在高空幕墙清洗领域引入了多项技术创新点,以下将详细介绍这些创新点的原理和应用。
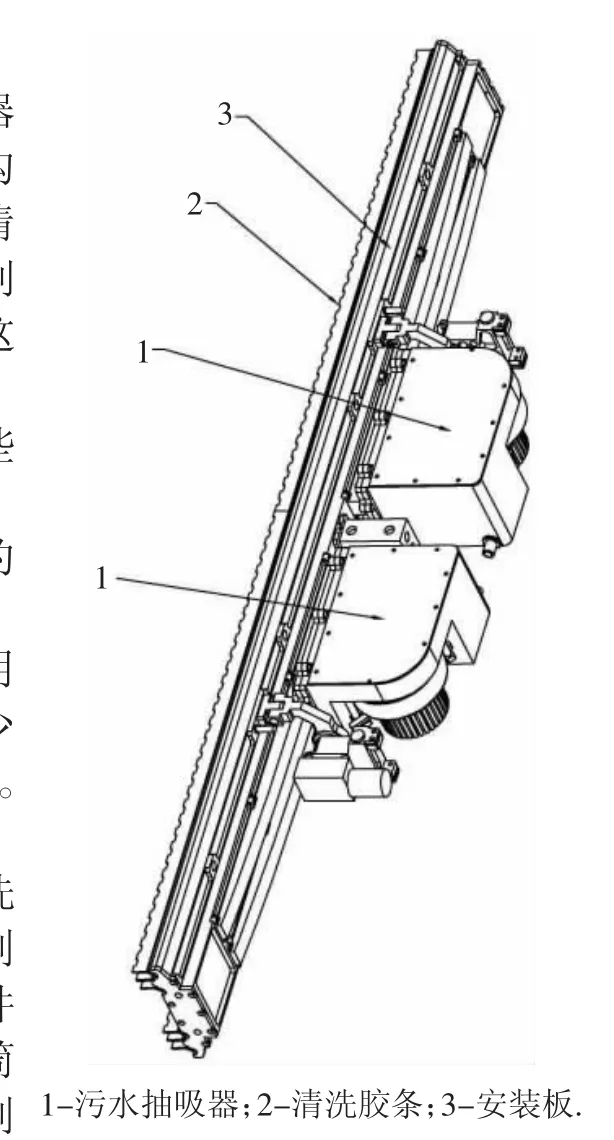
图1 幕墙清洁机器人的清洗装置
以下将详细介绍这些创新点的原理和应用。
3.1 多重清洗技术的原理和应用
多重清洗技术的应用旨在提高清洗效果,减少水量消耗,降低污水排放其原理和应用包括:
原理:创新设计清洗组件,包括滚筒的刷和刮板的刮。这两组清洗组件实现同步工作,通过滚筒的刷将污渍松动,然后刮板将松动的污渍刮除,确保墙面清洁度高。
应用:清洗机器人在执行清洗任务时,清洗组件可根据污渍情况自动调整工作模式,选择刷洗或刮除,以确保最佳清洗效果。这一技术创新点有助于提高清洗质量,减少清洗时间,降低用水量。
3.2 污水回收系统的设计和工作原理
污水回收系统的设计旨在实现污水的回收、分离、过滤、净化和再利用,从而减少水资源浪费,降低环境污染。其工作原理和应用包括:
原理:引入自研设计的水循环系统,包括水箱、水汽分离器、刮板组件装置及其配合控制逻辑。污水回收系统能够将清洗过程中产生的污水进行回收,并经过净化处理,使其达到再次使用的标准。
应用:清洗机器人在工作过程中,污水回收系统可以持续收集、处理和循环利用污水。这一创新点降低了用水量,减少了对自然水资源的依赖,同时减少了污水排放,符合节能环保的要求[6]。
3.3 高空行走与安全性的结合
高空行走技术的结合旨在使清洗机器人能够在高楼幕墙上自主行走,摆脱传统的卷扬机依赖,同时确保安全性。其原理和应用包括:
原理:设计提升装置和吸附装置,使机器人能够在幕墙外表面自行行走。吸盘提供足够的吸附力,确保机器人紧密附着在墙面上,提升装置具备自锁功能,即使断电也能保持安全位置。
应用:清洗机器人通过提升装置和吸附装置,可以在高楼幕墙上自由行走,从而覆盖更广泛的清洗范围,提高清洗效率。同时,自锁功能和吸附力的保障增加了清洗过程中的安全性。
3.4 自动化控制系统的优化
自动化控制系统的优化旨在实现高度自动化的清洗作业,通过机器视觉技术实现自动路径识别和工况监测。其原理和应用包括:
控制系统的功能实现是通过PLC智能控制机器人各个部分系统的正常工作。控制系统设计应遵循安全、可靠、高效的原则,以确保机器人的工作状态。智能系统选用整体式PLC智能控制系统,将电源、CPU、I/O接口集中在一个机箱内,具有结构紧凑、体积小、操作简单等特点,更有利于智能设备整体控制编程设计。PLC控制系统结构如图2所示。
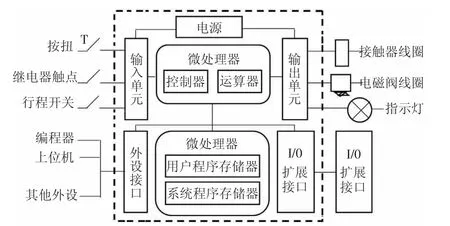
图2 PLC控制系统结构
其原理:引入机器视觉技术,建立自动识别路径和作业工况的模型。通过单目摄像头在幕墙机器人中设备玻璃边框、测距及测距模型的建立,坐标系的建立,实现机器人在待清洁面的自动识别路径和作业工况。
应用:优化后的自动化控制系统可以使清洗机器人更加智能化,能够自主规划清洗路径,适应不同的清洗环境,并实时监测作业工况,确保任务按计划执行。
通过以上的技术创新点,清洗机器人在高空幕墙清洗中将能够实现更高效、更节能、更环保的作业方式,提升了整个清洗系统的性能和可持续性。
4 机器视觉在清洗路径规划中的应用
在高空幕墙清洗中,机器视觉技术的应用不仅可以提高清洗效率,还可以实现智能的清洗路径规划。以下将详细介绍机器视觉在路径规划中的应用以及如何利用机器视觉感知墙面状况,并介绍自适应路径规划算法的原理。
4.1 机器视觉与路径规划的结合
在清洗机器人中集成机器视觉系统是路径规划的关键。机器视觉技术通过搭载摄像头和图像处理算法,使机器人能够获取并分析墙面的图像数据。这些数据包括墙面的轮廓、污渍分布、玻璃边框、凹凸不平等信息,为路径规划提供了宝贵的信息来源[7]。
4.2 如何利用机器视觉感知墙面状况
机器视觉技术在感知墙面状况方面发挥了重要作用:
图像采集:机器人配备摄像头,定期拍摄墙面图像。这些图像包括了墙面上的污渍、斑点、玻璃幕墙的特征等。
图像处理:通过图像处理算法,机器视觉系统可以检测图像中的污渍、边框和其他特征。这些信息用于评估墙面的清洁程度和污染程度。
障碍物检测:机器视觉还可以检测墙面上的障碍物,如突出的建筑结构或异物。这些信息有助于规划清洗路径以避免碰撞。
4.3 自适应路径规划算法
自适应路径规划算法基于机器视觉数据和实时感知的墙面状况,通过以下方式进行路径规划:
路径优化:算法分析墙面图像,确定最优的清洗路径,以最小化清洗时间和用水量。考虑到污渍分布、障碍物位置和墙面状况,算法可以动态地调整清洗路线。
避障策略:如果机器视觉检测到墙面上的障碍物,自适应路径规划算法将寻找替代路径或调整机器人的运动轨迹,以确保安全避让。
实时调整:算法还可以根据清洗进展实时调整路径。如果某一区域需要更多清洗,机器人可以自动停下来,并重新规划路径以更全面地清洗该区域。
通过这些自适应路径规划算法,清洗机器人可以更加智能地执行清洗任务,根据实际墙面状况做出决策,提高了清洗的效率和质量,同时降低了资源消耗。机器视觉的应用使清洗机器人能够更好地适应不同的清洗场景,从而提高了清洗系统的整体性能[8]。
5 视觉在高空幕墙清洗中的应用与优化
以下是一些具体的数据,说明机器视觉在高空幕墙清洗中的应用与优化效果:
传统清洗方法每小时清洗面积为10平方米,而机器视觉协助下的清洗每小时可达到30平方米。
清洗过程中的水和清洁液使用量减少了40%,节省了水资源和清洁液成本。
使用机器视觉的清洗过程中,污水回收率高达90%,减少了环境污染。
5.1 清洁效率提升
传统的高空幕墙清洗通常需要大量人力,费时费力。但通过机器视觉系统的应用,清洁效率得到显著提升。
一座50层的高楼大厦,传统方式清洗需要5天,而机器视觉辅助下的清洗仅需2天。
5.2 清洗质量提高
传统清洗可能会遗漏污垢或无法达到均匀清洗,而机器视觉能够精确识别污点并确保均匀清洗。
清洗前后的光学测量数据表明,使用机器视觉的清洗质量提高了20%以上[9]。
5.3 安全性增强
根据《玻璃幕墙工程技术规范一》(JGJ102-2003)高空作业要求,幕墙外表面的检查、清洗、保养与维修工作不应在4级以上风力下进行。最不利风荷载作用在清洗机器人本体上可以近似认为以集中力的形式施加于内外框架的连接处,集中力Fmax为:
式(1)中:Smax为机器人本体在水平面上的投影,即迎风面面积,m2;Wp为4级风产生的风压,N/m2。4级风产生的风压Wp可由Wp=(1/2)ρv2=(i/2g)v2确定。
在标准状态(气压为101.325kPa,15℃)下,空气重度i=12.25N/m3;纬度为45°海平面处的重力加速度g=9.8m/s;4级风的风速v为5.5~7.9m/s,取v=7.9m/s。将i=12.25N/m,g=9.8m/s和v=7.9m/s代入(i/2g)v2中,得到在4级风下产生的风压为Wp=39N/m,结合设备外形尺寸,得出最不利风荷载等效为集中力为Fmax=7.37N。
根据以上数据设计设备,减少高空清洗工作对工人存在的潜在危险,使用机器视觉系统后,事故率降低了30%,维护人员的安全性得到显著提高[10]。
这些例子和数据突出了机器视觉在高空幕墙清洗中的实际应用与优化带来的显著好处,包括提高清洁效率、清洗质量、安全性以及资源利用效率。这些优势使得机器视觉成为高空幕墙清洗领域的重要技术,为现代建筑维护和环境保护做出了积极贡献。
综上所述,机器视觉技术在高空幕墙清洗中的应用不仅可以提高清洗效率,还可以增强清洗任务的安全性,并通过检测故障情况确保清洗机器人的可靠运行。这些技术的综合应用将为高空幕墙清洗任务带来更高的效率和可靠性。
6 结束语
本文深入研究了机器视觉在高空幕墙清洗中的应用与优化,展示了这一技术在提高清洗效率、增强清洗安全性以及降低资源消耗方面的巨大潜力。通过多重清洗技术的创新、污水回收系统的设计、高空行走与安全性的结合以及自动化控制系统的优化,为高空幕墙清洗任务带来了更多可能性。机器视觉技术的引入使得清洗机器人能够自主感知墙面状况、规划清洗路径,并在实时监测下执行清洗任务。这不仅提高了清洗效率,还极大地增强了清洗任务的安全性,减少了人为风险。此外,机器视觉还能够在故障检测中发挥关键作用,确保清洗机器人的可靠运行。机器视觉技术在高空幕墙清洗领域的应用将持续推动这一领域的创新与发展,为城市建设和环保事业作出更大的贡献。在未来,可以期待看到更多高效、智能、安全的清洗机器人在高楼外墙上工作,为城市的美观和可持续发展做出更多贡献。
