基坑开挖对临近地铁轨道安全运营影响的分析
2023-12-13黄书葵
黄书葵
(深圳市赤湾商业发展有限公司,广东 深圳 518000)
近年来,城市地铁交通快速发展,成为人们的主要交通方式之一。然而,在地铁工程建设过程中,临近地铁轨道的基坑开挖工程成为一个重要的问题。基坑开挖活动可能对地铁轨道的安全运营产生一定的影响,因此,需要进行全面的影响分析和评估,以确保地铁的正常运行和乘客的安全。常见的技术方法主要有三维数字建模应力分析法、自动化变形监测法、地下水位监测等,几种方法在功能、目的及应用场景等方面都存在一定共性、异性,需要根据实际情况进行选择,但是鲜有学者进行方法对比和综合性应用研究。因此,本文以实际工程为例,结合应用三维数字建模应力分析法和自动化变形监测法,讨论2 种方法的区别和关联性,并分析基坑开挖对临近地铁轨道安全运营的影响。通过构建基坑开挖的数学模型,并实时监测土体的变形和位移情况,可定量评估土体的应力分布和变形情况,从而为地铁工程的规划和施工提供科学依据[1-2]。
1 工程概况
1.1 新建基坑及区间隧道概况
拟建工程为S 市某大型拟建建筑工程项目,项目与轨道交通设施间距在50 m 地铁保护区之内,基坑的开挖卸载、基坑支护结构的变形均有可能对邻近的轨道交通设施产生不利影响,因此需依据本项目的工程条件、基坑支护设计,分析评估该项目基坑工程施工对相邻轨道交通设施的影响。基坑与地铁的剖面如图1所示。
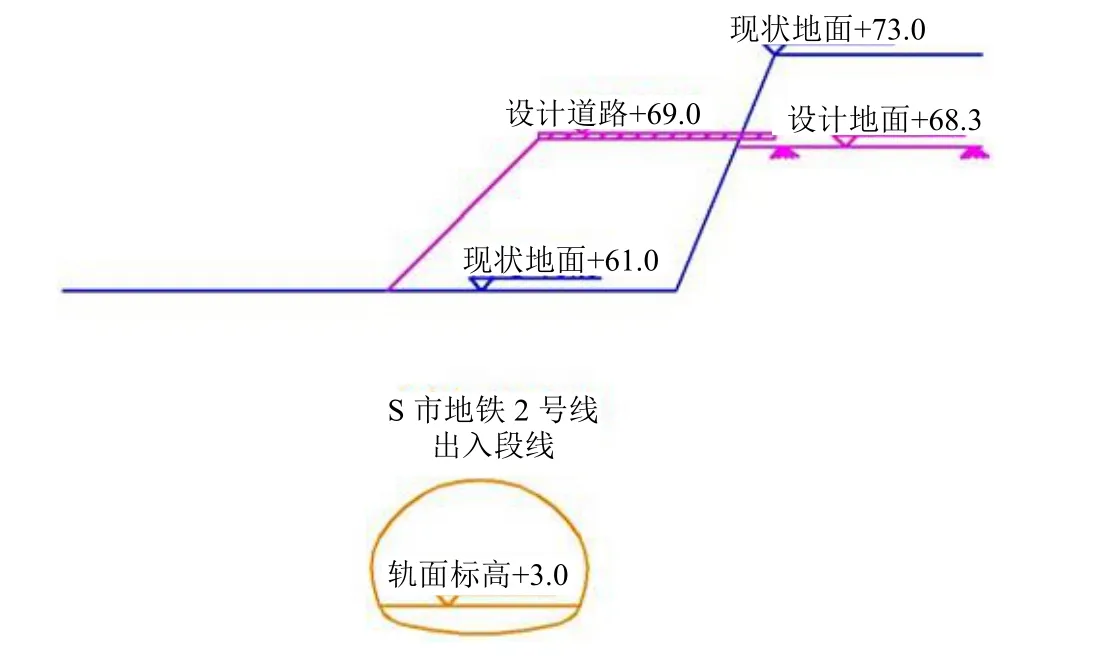
图1 新建基坑与地铁隧道侧剖面关系示意图
1.2 岩土层的物理力学指标
根据勘察报告提供的岩土层基本物理力学性质指标、原位试验成果,结合相关技术经验,提出本项目场地内主要岩土层的物理力学指标和计算分析采用的土工参数,具体如表1 所示。

表1 主要岩土层物理力学参数表
1.3 方法分析与比较
本文主要从基坑开挖三维数字建模和地铁隧道自动化变形监测2 个方向进行研究分析,2 种方法的区别和联系如下。
1.3.1 区别
在原理上,数字建模分析是基于数学模型的工程方法,通过输入结构或隧道的几何形状和材料参数等数据来建立数学模型进行应力和变形分布情况分析;自动化监测点位分析是基于实时数据采集和分析的技术手段,通过传感器获取隧道内部和周围环境的实时数据,对它进行监测和分析。在目的和应用上,数字建模应力分析主要用于预测结构的稳定性,提供设计和施工方案,并进行安全评估;自动化监测点位分析主要用于实时监测隧道的变形、应力、振动等情况,及时发现异常,并采取相应的措施。
1.3.2 关联性
在目标上,数字建模分析和自动化监测点位分析旨在提高工程的安全性和可靠性,保障结构和隧道的稳定运行。此外2 种方法互相补充,数字建模应力分析可以在设计和施工阶段对结构性能进行分析和优化,为自动化监测点位分析提供有力的数据支持。而自动化监测点位分析可以实时监测隧道的状况,为数字建模应力分析提供实际数据验证和反馈。
2 三维数字建模分析
2.1 分析计算方法
拟建项目的基坑工程与地铁结构的布置特征具有典型的三维特征,综合考虑地铁结构和基坑的结构形式,参照已有文献中的处理方法,本文采用三维分析方法。为真实准确地模拟基坑开挖对地铁结构的影响,需要对既有地铁结构开挖施工及后期邻近基坑的开挖过程进行全过程施工模拟。首先根据基坑工程范围、尺寸与既有地铁结构平面关系,建立数值计算模型;对岩土体进行物理力学参数的赋值,分析岩土体中地应力分布特点,模拟岩土体的初始地应力场分布情况;对既有地铁结构的开挖施工过程进行模拟,确定后续基坑开挖前围岩和结构的应力分布情况,以此作为基础,再模拟拟建工程施工过程,研究施工过程中地铁结构的应力和变形情况,进而对既有地铁结构和运营安全进行评判[3]。
2.2 应力分析
三维数字建模上,本文采用Midas/GTS 有限元计算软件,该软件具有先进的数值计算能力和图形化界面,可以模拟复杂的土体和结构行为,并进行稳定性、变形、应力等综合分析。初始地应力场的拟合采用侧边加载拟合法,即模型中所有材料均采用线弹性本构模型,在模型右侧及底部施加法向位移约束,在模型左侧边界上施加法向应力,计算后模型的应力达到平衡后即为模拟的初始应力场。施加法向应力等于左侧边界上各点的自重应力乘以一个侧压力系数,一般浅层地层水平侧压力系数为0.4~0.8。拟合后得到的初始总地应力场分布如图2 所示[4].
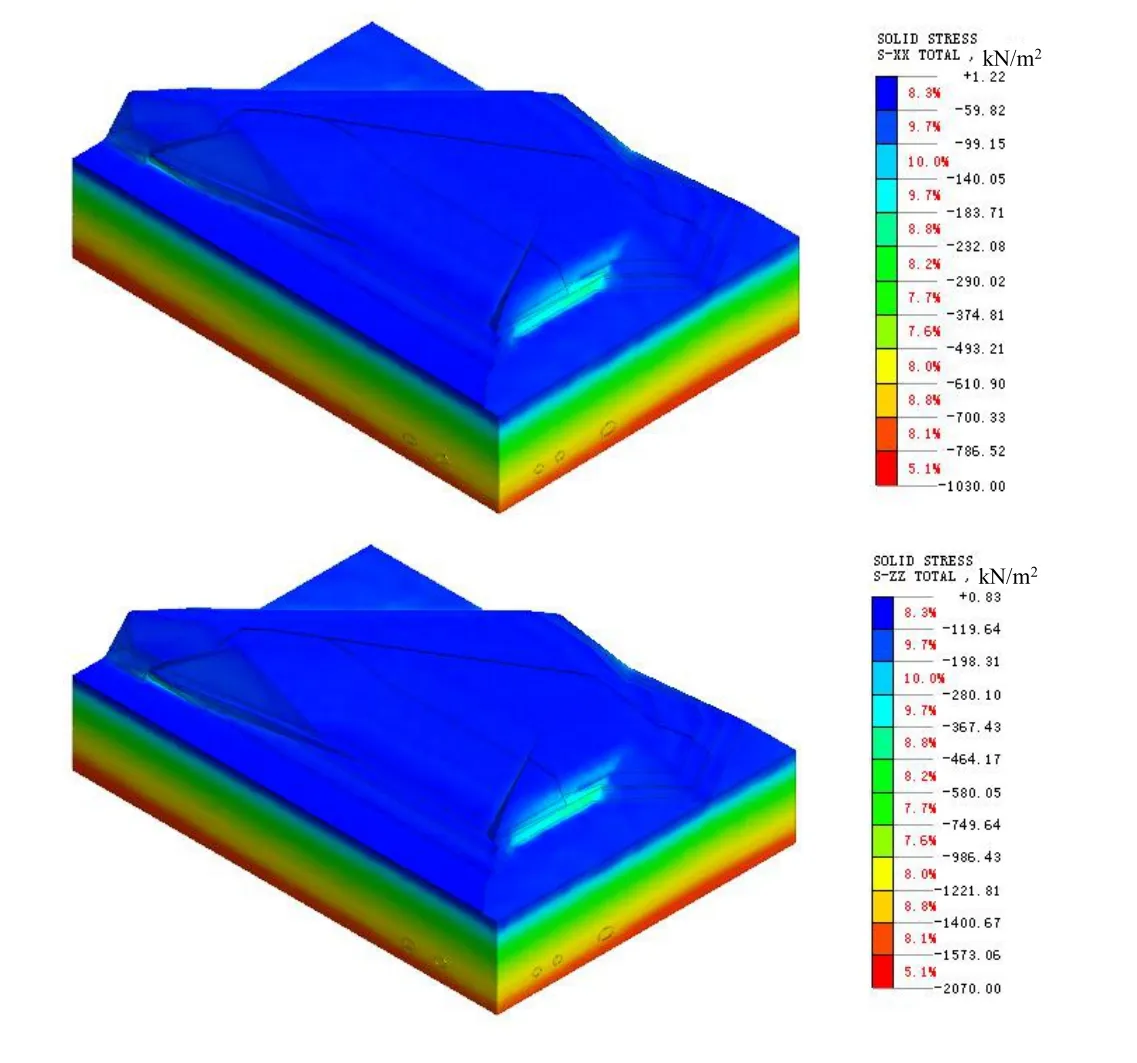
图2 场地X 向和竖向总应力云图
然后进行地铁施工应力场分析,通过应力分布可间接反映出道路路基开挖施工前整体场地的应力状态,为结构安全评价提供佐证。并进行后期用地整平及规划支路回填施工工况应力场,反映出整体场地的应力状态,从而发现应力分布规律,为结构安全评价提供佐证。
2.3 位移分析
评价基坑施工对地铁隧道的影响的主要指标为结构的水平位移及竖向位移,也最能反映项目施工对地铁结构的影响程度。模型计算可以直观读取基坑结构及地铁结构的位移值,从而定量评判地铁结构的安全性,最后计算得出基坑开挖造成S 市地铁2 号线出入段线的最大水平变形为0. 28 mm 及竖向隆起为0.72 mm。
3 地铁自动化变形监测分析
自动化监测实施是通过安全智能监测与预警一体化云平台,远程向测量机器人发送测量指令完成一系列测量动作并得到数据。整个过程,测量机器人与通信工控系统用专用电缆连接,使它同时实现设备供电及测量数据及测量指令在预警平台的接收发模式。
3.1 监测点布设
对本段监测区间左右线各设计46 个断面,每个断面各布设6 个三维变形监测点,6 个点分别位于隧道底两侧(2 点)、隧道中腰线(2 点)、隧道顶部(1 点),监测点采用以L 形小棱镜为主的元器件,布点时用冲击钻打孔及对应膨胀螺丝安装固定。
3.2 仪器位置及通信控制系统安装
隧道自动化监测系统由测量机器人即带驱动马达(或者磁驱)的全站仪,供电系统,通信工控系统,变形监测基准点(控制点)、公共点、变形监测点,安全智能监测与预警一体化云平台( 以下简称“WebMos 平台”),监测软件云端服务器,共6 个部分构成。布设自动化监测设备时本隧道处于洞通未铺轨状态,隧道内全站仪采用专用支架固定在隧道内一侧的侧壁上,支架处于监测点通视良好区域,全站仪支架附近安装工控箱,工控箱内包含供电电源、全站仪远程控制系统组件及通信设备。支架附近用膨胀螺丝固定一个电箱,里面包含自动化通信模块系统;在建隧道自动化监测信号系统由光纤加无线发射装置组成,光纤沿隧道侧壁,将光纤一端接入控制箱,另一端光纤拉到盾构井的出口保证有通信信号,在此处安装一个无线信号引入装置连接光纤端[5-6]。仪器位置及实施监测示意图如图3 所示。
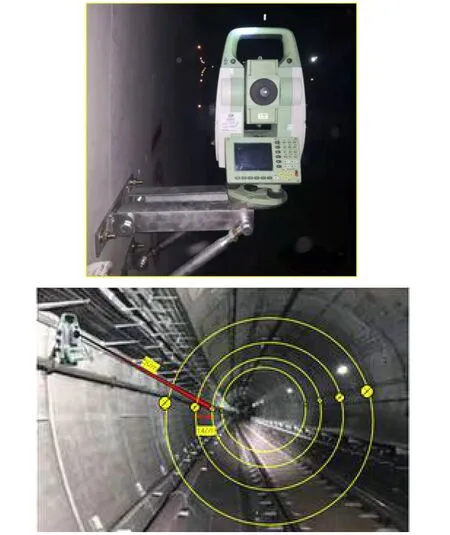
图3 仪器位置及实施监测示意图
3.3 自动化监测方法
自动化监测实施时通过安全智能监测与WebMos平台,远程向测量机器人发送测量指令完成一系列测量动作并得到数据。测量机器人、监测点及通信工控系统安装调试完毕后进入WebMos 平台,找到对应操作学习测量界面,测量机器人在人工测量基准点(控制点)定向的基础上进行云端自动化的定向学习测量。定向完成后按WebMos 设定的测量程序进行监测点逐个点位的学习测量,测量完成后保存所有测量数据并传输到监测软件云端服务器上;然后WebMos 平台通过定向后形成的方位角、平距、斜距自动对监测点的数据进行计算与分析,给出各监测点的三维坐标系(平面及高程)及点与基准点的角度距离关系,经过多次测量平差形成监测点点位初始值。最后通过设置WebMos 平台在特定的时间启动测量机器人进行无间断的连续测量;通过与点位初始值的比对,形成并绘制点位变形时的曲线图。每次测量时,遵循先控制点(基准点)后监测点,按后方交会方法计算出仪器坐标和高程,然后再观测变形监测点。
3.4 监测数据分析
新建建筑工程基坑开挖对地铁出入段产生的直接影响主要体现在横向、纵向、高程3 个方面,间接的变化有经向收敛、隧道椭圆度变化。通过一周的观测和统计,得到高程位移累积变形值为2.1 mm,横向位移累积变形值为1.5 mm,纵向位移累积变形值为1.2 mm;隧道道床沉降差累积变形值为-0.5 mm;道结构横向收敛值为-0.9 mm。可以得出,隧道结构自动监测变形值变化较小,未超报警值,仍处于安全可控状态。
4 结束语
本文应用2 种方法对临近地铁轨道安全运营影响进行分析,通过以上应用可以看出,三维数字建模应力分析法主要适用于工程设计和施工阶段,可以对结构进行全面的应力分析和评估;自动化变形监测法适用于结构的实时监测和控制,主要用于工程的运行和维护阶段。在方法复杂性方面,三维数字建模应力分析法需要构建复杂的数学模型,并进行大量的计算和分析,对计算能力和数据处理能力有一定要求;自动化变形监测法则相对简单,通过传感器实时采集数据并进行简单的分析和处理,适用于实时监测和控制,同行从业者可以根据工程目的和要求进行选择。
