基于应答式水声定位系统的目标快速定位技术实现及试验验证*
2023-12-11崔沁青
崔沁青 李 伟 杨 杰
(海军潜艇学院战略导弹与水中兵器系 青岛 266199)
1 引言
随着21世纪人们对海洋认识和开发的进程,水下航行器的使用和发展日趋活跃[1~2]。作为水下航行器完成任务的重要保证,其定位十分重要,但由于水下环境的未知性和复杂性,给其追踪定位带来了极大困难,需要考虑探测精度、探测距离、装备成本的问题,以至于一般的水下定位技术无法满足水下航行器的定位需求。特别是军事用途的水下航行器,还需要额外考虑隐蔽性的要求。高精度的水下定位导航系统是控制水下航行器作业航行的重要手段,因此水下定位系统也成为了检验水下制导兵器性能的常用手段[3~5]。
水下航行器及水中兵器实航结束后需要搜寻和回收。目前,主要采用加装主动式声信标和应答声信标两种方式对水下目标追踪定位[6]。主动式声信标优点是结构简单、功耗较低、体积重量小、待机时间较长,便于安装,但其最大的缺点是只能测量方向,难以测量距离[7]。另外,对于搜寻武器装备来说,由于主动式声信标持续发射主动声脉冲,一旦我搜索船只无法发现,容易将装备位置暴露给别国探测设备,造成泄密[8]。为此,本文根据系统定位原理,设计了一种小型应答式水下定位声信标,应答式信标入水后处于待机状态,不主动发射声信号,只有收到合作(唤醒)声信号时,才发出应答声信号,这样既可以减小耗电以延长工作时间,又可以避免被非合作方定位和打捞。基于应答式水声定位系统进行技术设计和实验验证,测试其系统功能和性能指标,为准确追踪实时解算和探测水下目标位置提供依据。
2 应答式水声定位机理及技术实现
2.1 定位机理
应答式水声定位系统[9~10]的任务是为水下目标提供精确导航定位,解决目标在水下不同工况条件下的航行机动性能参数测量问题。该系统可以在水下航行器及武器系统试验中,实时地为水下目标导航定位,保障目标在水下试验中能安全、可靠、协同地机动,是靶场重要的基础测控设备。在海底预先布设应答器基阵,在同步信号的触发下,目标上加装的水声收发机周期性地发射测距询问声信号,水下各应答器收到询问声信号后应答其相应频率的应答信号,水声收发机收到应答信号后,通过同步脉冲前沿测时,测得“询问一应答—接收”的双程声传播时延,乘以声速即可确定目标到各应答器之间的往返距离,从而得到空间椭球面交汇方程组,求解该方程组得出目标所处的位置,逐点定位解算得到目标的运动轨迹,由此为水下目标定位导航。
应答式水声定位系统的定位基元布置在船底,通常由三个以上换能器组成,换能器的阵形为三角形或四边形,组成基阵。基阵长度一般在几米到几十米之间,各换能器之间的相互关系精确测定,组成基阵坐标系。已知三个阵元的坐标分别为(x1,y1,z1)、(x2,y2,z2)和(x3,y3,z3),声速为c,分别测量出信标发射的声信号到达三个阵元的时间t1、t2、和t3,就能根据下列方程组计算出信标的坐标(X,Y,Z)。
式中,ti为声脉冲从目标到各基元的传输时间,c 为声速。
应答式水声定位系统的测量方式[11]是由一个换能器发声,所有换能器接收,通过测量声波在应答器与发射基元之间的传播时间来确定斜距;通过各基元接收应答器信号的时间差来解算目标的方位,进而推算出应答器的相对坐标。系统根据基阵相对于船坐标系的固定关系,配以垂直参考单元(VRU)、罗经(Gyro)、参考坐标系统(GPS)等外部传感器,以获取船的位置、姿态、船艏向等辅助信息,最终计算得到应答器的大地坐标[12]。
2.2 技术实现
应答式水声定位系统组成见图2,应答信标随UUV 入水后立即激活,可以根据需要设定一个等待时间,当等待时间结束后就处于应答状态,应答信标在应答状态下并不会主动发射声信号,它只是实时监测探测脉冲声信号,可以节约电量,并具有一定的隐蔽性。当需要对UUV 等水下目标进行定位时,测量船携带探测声纳航行到有效的探测距离内,按设定的周期向声场中发射探测脉冲声信号,应答信标接收到探测脉冲声信号后,立刻回复一个应答脉冲声信号,探测声纳检测到应答脉冲声信号后,就能根据应答脉冲声信号相对于探测脉冲声信号的时延值,测量出应答信标与探测声纳之间的距离。

图1 应答式水声定位原理示意图
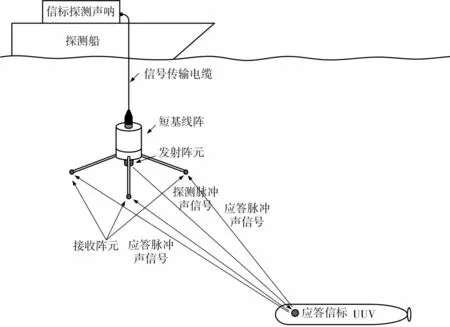
图2 应答式水声定位系统组成示意图
探测声纳的湿端是一套测向基阵,测向基阵由1只收发合置换能器和2只接收换能器组成,3只换能器在水平面上呈L 形布置。收发合置换能器发射探测脉冲声信号后就处于接收状态,与另外2 只接收换能器一起检测应答脉冲声信号。由于3 只换能器之间存在一定的间距,因此,不同入射方向的应答脉冲声信号到达3 只换能器的时间存在一定的时差,根据3 只换能器接收信号的时差及3 只换能器之间的间距,就能计算出应答脉冲声信号的入射方向。测量到应答脉冲声信号的入射方向及距离,就能对UUV进行准确的定位。
探测脉冲声信和应答脉冲声信号的示意图见图3,探测脉冲声信号由两个CW 脉冲组成,应答信标必须接收到两个有效的脉冲后,才回复应答脉冲声信号,这样可以提高系统的抗干扰能力。应答脉冲声信号也由两个CW 脉冲组成,可以用两个脉冲之间的时差表示应答信标处于水下的深度(需要将UUV 上的压力传感器输出的水压值传送给应答信标,应答信标再根据压力值设置两个脉冲之间的时差),因此本系统可以同时测量出UUV 的方向、距离和深度。

图3 探测脉冲声信和应答脉冲声信号的示意图
应答信标主要由收发合置换能器、信号调理电路、功率放大电路、数据处理单片机、嵌入式数据处理软件和水密电子舱等组成,所有组成内容都安装在一个Φ55×90的水密电子舱内。
探测声纳主要由测向基阵、功率放大电路、三通道信号调理电路、数据处理单片机、嵌入式数据处理软件、显控计算机和显控软件等组成,其组成框图见图5。显控软件运行于工控计算机,显控软件可以通过触摸屏或鼠标操作探测过程。探测的数据实时保存在计算机硬盘上,可以根据需要进行数据回放。

图4 应答信标组成框图
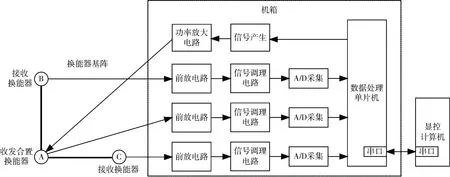
图5 探测声纳组成框图
3 试验验证
基于应答式水声定位系统机理和软硬件设计,试验的主要目的是验证系统工作机理的可行性,对主要技术指标进行测试。开展湖上试验测试系统的作用距离、测距精度和测向精度,为准确追踪实时解算和探测水下目标位置提供依据。
5月下旬,在杭州千岛湖水域开展了水下应答定位性能试验验证,包括最大定位距离验证、测距误差试验、测向误差试验和水下机动轨迹测量等内容。
3.1 最大定位距离验证
测量船抛锚在水深大于10m的水域,信标探测声纳主机放置在测量船上,通过信号传输电缆将短基线阵吊放到水下约5m深度(图6)。

图6 最大定位距离湖上试验示意图
将应答信标吊放到水下约5m 深度,并由橡皮艇拖拽缓慢运动,将应答信标与短基线阵之间的距离逐渐拉远,直到距离大于1000m。
信标测量距离为899.7m(T=2s)和1429.4m(T=3s)的试验数据分析见图7和图8。
由测量数据分析可知,本次试验的最大探测定位距离超过1400m。在距离900m 以内,距离测量数据连续稳定,几乎没有离散数据(图7 右上距离曲线);在900m~1400m 的距离范围,测量数据离散性变大(图8 右上距离曲线),并存在一定的漏测现象。此时,若使橡皮艇停车一段时间(超过5s)后,测量数据又会变得比较稳定,判断为橡皮艇开动时螺旋桨噪声对信号接收和检测产生了干扰。

图7 测距899.7m的数据分析图
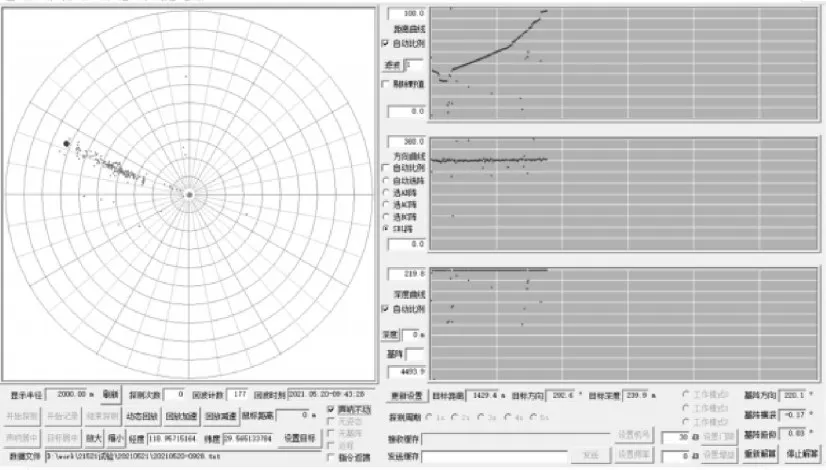
图8 测距1429.4m的数据分析图
另外,橡皮艇拖拽应答信标前行时,应答信标会因水流的作用向水面漂浮,使其实际入水深度变小(约2m~3m),收发深度差也会造成一定的声传播损失。
3.2 湖上测距误差试验
橡皮艇拖带信标做远离基阵的直线运动,在146.6m~167.8m、281.2m~299.5m、551.0m~576m 三个距离区间的范围内,取30 个测量样本,进行激光测距(作为真值)和信标测距的数值比对分析,求出绝对和相对误差,图9和图10为误差分析曲线。

图9 绝对误差分析曲线

图10 相对误差分析曲线
从实测结果和误差曲线看,最大相对误差为0.9%(288.5m 距离时的测量结果),平均相对误差为0.3%,与实际测量距离相比产生的影响较小;另外,在600m以内距离范围,测量误差并未随距离拉大而增加。应答式声信标水下测距精度和稳定性令人满意。
3.3 湖上测向误差试验
采用1 条533 口径UUV(AUV)搭载声信标实航,沿280°的径向做远离声纳基阵的水下直线运动。在距离361m~539.3m 区间(图11 中虚框内航段,图中右上角照片为搭载声信标的UUV),对回波计数第316~第416 共100 个数据点进行采样,获得声纳—信标测向数据为278.64°~286.15°,正负最大角度偏移量为7.51°,基于UUV(信标)的计划航向280°,可分析得出测向误差小于7°。

图11 信标测向误差试验及坐标曲线
3.4 水下动态轨迹测量监控
清晨06:14,UUV 以5kn 航速、五角星形状水下航行,通过短基线-声信标定位系统实时测量UUV 方位,测量结果如图12中左半部分所示,测得UUV 水下最远距离218m(五角星顶点位置);中午13:48,UUV 以5kn 航速、沿正方形(边长约100m*100m)水下航行,定位系统实时测量结果如图12中右半部分所示,测得UUV 水下最远距离约188m。经与UUV 内测记录的轨迹比对,本定位系统实测数据拟合度良好,可以作为UUV 水下位置实时监控的有效技术手段。
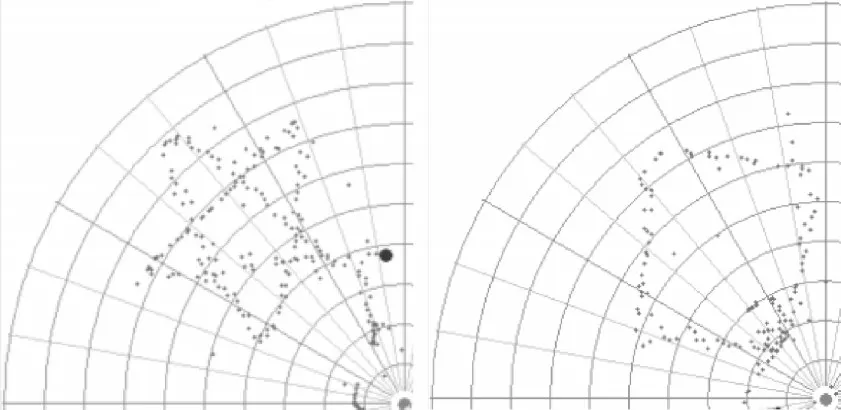
图12 UUV动态轨迹测量图
3.5 试验结论
本次试验达到了预期的目的,经过本次试验,可以初步得出以下结论:一是应答式水声定位系统可以正确地测量到信标的距离和方向;二是应答式水声定位系统在湖上的最大作用距离约为1400m,如果增信标及换能器基阵的布放深度,有可能进一步提高最大作用距离。
4 结语
本文针对水下目标精确导航定位的功能需求设计了一种小型应答式水下定位声信标,并基于应答式水声定位系统的软硬件设计开展湖上试验,验证了定位系统的可行性及探测精度。针对实验结果提出以下改进措施:一是提高测向精度。本次试验所使用换能器基阵是一套在水平面上呈等边三角形布置的3 基元测向阵,三角形的边长约为0.5m,基元间距比较短,测向精度和稳定性不太理想,主要是为了便于人工布放。在信噪比足够的情况下,3 基元测向阵的测向精度与基阵的孔径近似呈线性关系,增加3 基元测向阵的边长就能提高测向精度;二是采用具有空间增益的换能器基阵提高作用距离。目前使用的换能器基阵的阵元是球形换能器,基阵的空间增益为0dB,如果采用具有空间增益的换能器基阵,可以进一步提高作用距离。今后还需进一步开展不同环境下的定位实验来提高系统追踪目标的可靠性和精确性。