考虑随机扰动的直流配电系统宽频振荡镇定控制
2023-12-11李云利赵学深姜淞瀚
彭 克,李云利,赵学深,姜淞瀚
(山东理工大学电气与电子工程学院,山东省淄博市 255000)
0 引言
随着直流负荷与分布式电源的大量接入[1],直流配电系统因能实现交直流互联[2]、提高供电效率和灵活可控[3]等特点得到了学术界和工业界的广泛关注。但直流配电系统采用电力电子设备与交流系统互联,系统内部缺乏惯量支撑单元,弱阻尼特性显著[4],分布式电源与直流负荷功率的随机扰动、电路参数与控制参数的统计误差,使得直流配电系统易产生不同时间尺度的振荡。直流配电系统运行工况复杂以及随机扰动随分布式电源与各类型负荷接入系统而愈发严重[5-7],如何建立描述直流配电系统随机性的时域模型,以及实现宽频振荡控制需要深入探究并提出有效的解决方案。
近年来,许多学者针对不同时间尺度下的电压振荡现象进行了研究。针对直流配电系统高频振荡现象,文献[8]提出了一种H∞鲁棒控制方法,针对双端柔性直流配电系统存在参数摄动和负荷突变等问题,抑制扰动引发的电压高频振荡现象,提高系统鲁棒性;文献[9]提出了前馈补偿下垂控制方法和改进虚拟电阻的控制器设计方法,抑制直流配电系统的电压高频振荡现象;文献[10]通过建立直流配电系统直流电压的降阶微分方程,揭示了系统参数对高频振荡的影响。针对直流配电系统低频振荡现象,文献[11]针对并网双馈感应发电机低频振荡现象,提出了一种虚拟惯性控制方法;文献[12]针对直流配电系统电压低频振荡,设计鲁棒控制器进行系统稳定性的提升,有效抑制系统低频振荡;文献[13]建立直流配电系统物理电路模型,推导出等效降阶模型,揭示系统关键参数对低频振荡的影响。直流配电系统互联装置控制系统存在下垂控制、电压控制和锁相控制等多个时间尺度的控制环节,与系统线路和恒功率负荷易发生不同时间尺度下的振荡,文献[9-13]均采用确定性的控制方法,只能针对系统高频或者低频振荡进行控制。此外,直流配电系统存在光伏发电、风电发电等出力的间歇性波动,线路参数摄动以及电动汽车、LED 照明等负荷功率的随机性波动,针对随机扰动下的直流配电系统宽频段振荡抑制方法还有待研究。文献[14]针对倒立摆系统受到外部随机干扰的问题,提出一种随机非线性系统耗散稳定的H∞鲁棒控制方法,使系统鲁棒性及稳定性得到提升。Hamilton 系统理论在非线性控制理论领域有重要贡献,文献[15]推导出双馈风力发电系统的Hamilton 系统形式,设计了基于Hamilton 理论的控制器,提升了双馈风力发电系统的稳定性。
本文针对直流配电系统随机扰动下的宽频振荡问题,推导下垂控制的直流配电系统电压微分方程,建立系统随机动态模型。通过构造Hamilton 系统能量函数,将反映多时间尺度特性的直流电压四阶微分方程变换为广义受控的Hamilton 系统形式,设计预反馈控制律进而推导出镇定控制器。仿真及实验结果表明所提方法实现了宽频振荡抑制效果,直流配电系统稳定性以及控制性能得到明显提升。
1 直流配电系统结构及控制策略
直流配电系统的拓扑结构有单端辐射型、双端型和多端型供电结构,可以根据实际应用场景对系统的拓扑结构及接线方式进行选择[16-18],直流配电系统单端辐射型供电结构如图1 所示,以AC/DC换流器作为连接交流系统与直流母线的桥梁,直流母线接入负荷和分布式电源等。
AC/DC 互联换流器的电路结构如附录A 图A1所示。下垂控制方法不仅能维持直流电压稳定,还能协调换流器有功功率输出。因此,本文针对Udc-P下垂控制推导直流配电系统的动态方程(见附录A),大多数恒功率控制的电力电子装置端口和直流负荷具有恒功率特性[19-20],本文将其等效为恒功率负荷。图中:Udc为系统输出直流电压的实际值;P为换流器输出有功功率的实际值。
通过将附录A 式(A6)、式(A7)、式(A10)和式(A12)及系统直流侧电路模型联立,Udc-P下垂控制框图如附录A 图A2 所示。根据图A2,模型可简化为式(1)至式(4):
式中:Rload为直流负荷等效的电阻值;Iload为流过直流负荷的电流;Idc为系统直流侧流出的电流;K为比例系数;kceg为换流器的等效增益系数;Cdc为直流侧等效滤波电容;s为拉普拉斯算子;id为交流线路上流过电流的d轴分量;id,ref为交流线路上流过电流的d轴 分 量 参 考 值;ki,p和ki,i分 别 为 电 流 内 环 的 比 例-积分环节的比例、积分系数;L为交流线路等效滤波电感;R为交流线路等效电阻。
2 直流配电系统随机动态模型的建立
将系统数学模型式(1)至式(4)在时域形式上进行联立,得到Udc的四阶微分方程[10],如式(5)所示。
式中:Udc,ref为直流母线电压参考值;Ud为系统交流电源电压的d轴分量;Pref为换流器输出有功功率的参考值;kv,p和kv,i分别为电压外环的比例-积分环节的比例、积分系数;kd为下垂系数。
选取系统状态变量矩阵x如下:
式中:x1至x4为选取的状态变量。
将式(5)进行变量代替得到式(7):
其中
直流配电系统因负荷扰动和系统参数变化、电路参数和控制参数的不匹配、设备老化等复杂工况引起的线路参数摄动等都会引起系统电压振荡。电动汽车等多类型负荷的功率随机波动以及分布式电源出力间歇性波动使直流配电系统稳定运行的平衡点不断发生变化[21],上述随机因素会使系统电压产生振荡失稳现象。
直流负荷波动等快变随机因素在秒级时间尺度上发生变化,其扰动范围和幅值在某一均值上下波动,将这些随机扰动看作高斯过程[22],直流配电系统随机扰动模型如式(8)所示。
式中:σ为随机扰动强度;W(t)为高斯过程。
3 基于Hamilton 系统理论的宽频振荡镇定控制器设计
3.1 Hamilton 系统理论
广义Hamilton 系统的建立可保留系统非线性特征,简化系统模型,为系统控制器设计提供理论支撑,非线性动态受控系统如式(9)所示[23-24]。
式中:x(t)为非线性系统的状态变量的微分项;g(x)为非线性系统结构系数矩阵;f(x)为非线性系统的向量函数;u(t)为非线性系统控制输入量;y(t)为系统输出变量;h(x)为系统函数。
存在非线性受控系统的平衡点xe,令u(t)=0,使得式(9)中f(xe)=0 且y(t)=0 的所有解都趋于xe,则式(9)系统是零状态可检测的[25]。存在不唯一的能量函数H(x),使得非线性受控系统表示为式(10)所示Hamilton 系统的形式。
式中:J为Hamilton 系统结构矩阵中的反对称矩阵;R为结构矩阵中的半正定矩阵;∇H为能量函数H(x)的一阶偏微分形式。由非线性系统式(9)变换为式(10)的形式是Hamilton 的实现过程。系统若满足零状态可检测的条件,且H(x)是连续可微的,H(x)在系统平衡点处可取得极小值,则Hamilton 系统镇定控制器可设计为[26-27]:
式中:k为反馈增益矩阵,且k>0。在控制策略u(t)的作用下,闭环系统表示为式(12)所示形式。
令H~ (x)=H(x)-H(xe),则闭环系统的状态轨迹如式(13)所示[21,24]。
由于k为正定矩阵,R为半正定矩阵,˙(x)≤0,(x)为式(13)闭环系统的一个Lyapunov 函数,在控制策略u(t)的作用下,使得系统式(10)在平衡点xe处渐近稳定。
3.2 基于Hamilton 能量函数的宽频控制器设计
为反映直流配电系统多时间尺度特性,系统稳定控制需要考虑不同频率的电压振荡现象,在直流电压四阶微分方程上进行宽频控制器设计。根据所建立的直流配电系统随机扰动模型,变换为如式(10)所示形式,选取直流配电系统直流电压Udc作为Hamilton 系统的控制向量,再结合选取的状态变量,推导出非线性动态受控模型如下:
其中
针对式(14),通过Hamilton 能量函数方法设计预反馈控制律以及推导出系统的镇定控制器。
步骤1:构造出Hamilton 系统的能量函数H(x)。为了使式(14)变换为广义受控Hamilton 系统的形式,构造的能量函数如式(15)所示。
则能量函数的梯度可表示如下:
通过构造的能量函数H(x),将直流配电系统随机动态模型表示为Hamilton 系统的形式,如式(17)所示。
式中:g=[0,0,0,K52/K1]T;gw=[0,0,0,σ/K1]T。
步骤2:设计预反馈控制。对控制向量进行预反馈控制律的设计,使Hamilton 系统结构矩阵满足设计要求,构造预反馈控制律如式(18)所示。
式中:v为广义受控Hamilton 系统的控制策略。
将预反馈控制律代入式(17),使得Hamilton 系统矩阵系数满足要求,如式(19)所示。
式中:矩阵J′和R′分别如附录A 式(A13)和式(A14)所示,经变换满足系统矩阵形式要求。Hamilton 系统的输出方程如式(20)所示。
步骤3:设计宽频振荡镇定控制器。当u(t)=0时,将非线性系统的平衡点xe代入验证零状态可检测性,能量函数H(x)在平衡点处严格极小,可以求出非线性系统收敛于最大不变子集{x∈R:x1e=-K6/K51,x2e=0,x3e=0,x4e=0},其 中,x1e、x2e、x3e、x4e分 别 为 系 统 状 态 变 量x1、x2、x3、x4在 平 衡 点处的取值,非线性受控系统平衡点即为上述不变子集,将平衡点代入系统的输出方程,得y(t)=0,系统满足零状态可检测的条件,且∇H(xe)=0,此时广义受控Hamilton 系统存在镇定控制策略如下:
式中:k′为一阶矩阵,即常数。
得到式(19)的控制器如式(22)所示。
将式(22)代入式(19),可以得到加入宽频振荡镇定控制器后的系统四阶微分方程,如式(23)所示。
3.3 宽频振荡镇定控制器的具体设计
本文以直流配电系统单端辐射型拓扑结构为例,如附录A 图A3 所示。系统电路及控制参数如附录B 表B1 至表B3 所示。
由直流配电系统直流电压四阶微分方程式(5)得到闭环传递函数如下:
式中:K7=kv,iki,ikcegkd。
将设计的宽频段镇定控制器加入控制系统,镇定控制器H(s)在有功功率参考值和实际值的偏差环节后加入,直流配电系统Udc-P下垂控制框图如图2 所示。将加入控制器后的系统微分方程变换为频域形式,其闭环传递函数G′(s)如式(25)所示。根据控制框图结构推导出H(s)的传递函数如式(26)所示,其中,M=-K7(K1K3+k′K2K),N=K7kd。
对直流配电系统加入控制器前后的闭环幅相特性曲线与阶跃响应曲线进行对比,分析其动态特性与稳定性,分别如图3 和图4 所示。
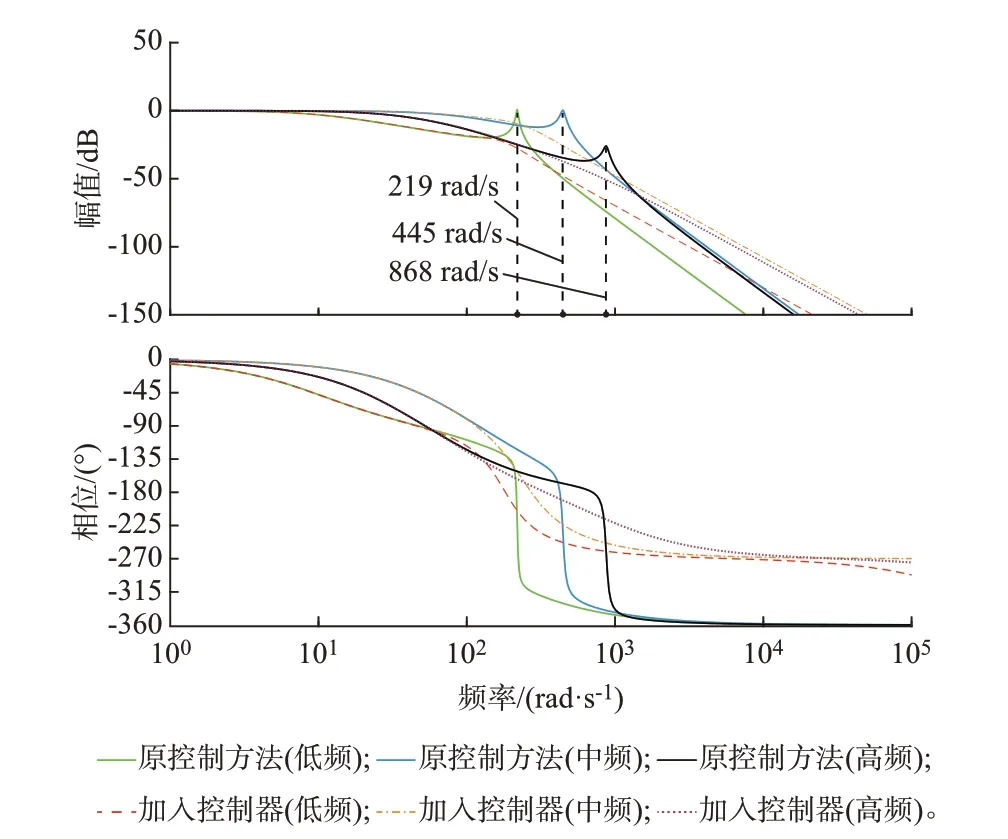
图3 闭环幅相特性曲线Fig.3 Closed-loop amplitude-phase characteristic curves
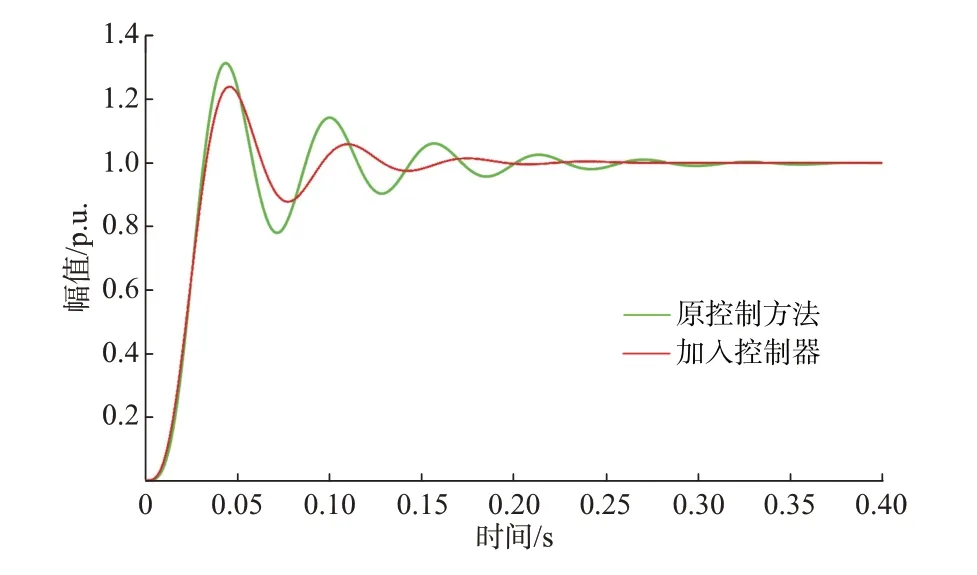
图4 阶跃响应曲线对比Fig.4 Comparison of step response curves
对图3 结果进行分析,系统分别在219 rad/s(34.85 Hz)、445 rad/s(70.82 Hz)和868 rad/s(138.15 Hz)处存在谐振尖峰,系统频率振荡峰值分别在低、中、高频参数下,对比镇定控制器加入后系统频率振荡的峰值显著降低,宽频振荡抑制效果显著,提高了系统的稳定性。图4 以低频振荡为例,可以看出加入镇定控制器后系统超调量由31.7%减小到23.8%,且调节时间缩短,加入控制器后提高了系统的动态特性。
4 算例仿真验证及分析
在PLECS 仿真软件中对直流配电系统进行仿真验证,搭建如附录A 图A3 所示的单端直流配电系统和多端直流配电系统的仿真算例,并按照附录B 表B1 至表B3 进行参数设置,下面分析系统在直流负荷功率突变、交流侧线路电感和直流侧滤波电容参数摄动以及多端直流配电系统负荷扰动的情况下,直流电压产生不同频率振荡的现象,对比加入镇定控制器后系统电压曲线,验证所设计的控制器的有效性。
4.1 系统电压低频振荡现象
1)直流负荷功率扰动:系统仿真运行总时间为0~8 s,功率为20 kW 的直流负荷1 始终接入系统直流母线且稳定运行,4 s 时突然接入功率为25.6 kW的直流负荷2(负荷扰动为128%),其功率随机波动服从均值为25.6 kW、标准差(随机扰动强度)为3 的高斯分布,电压波形对比如图5 所示。
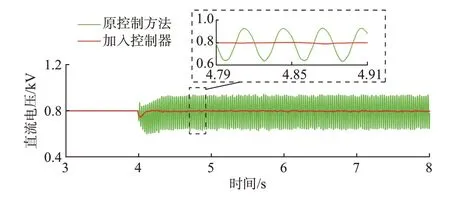
图5 直流负荷突变下的电压波形Fig.5 Voltage waveform under DC load disturbance
对图5 仿真结果进行分析,系统负荷功率扰动后,直流电压产生低频振荡(34 Hz)现象,加入镇定控制器后,系统电压低频振荡现象被有效抑制。
2)交流侧电感参数摄动:系统运行时间为0~6 s,在4 s 时因线路变化,交流线路的等效电感参数摄动,4 s 时交流测电感参数由4 mH 变化为5 mH,加入镇定控制器前后的系统直流电压波形对比如附录B 图B1 所示。
3)滤波电容参数扰动:系统运行时间为0~6 s,4 s 时直流侧等效滤波电容参数由6 000 μF 变为4 500 μF,加入镇定控制器前后的系统直流电压波形对比如附录B 图B2 所示。
由附录B 图B1、图B2 仿真结果可以看出,系统电路参数发生扰动后,直流电压出现振荡现象,加入镇定控制器能有效抑制。
4.2 系统电压中频振荡现象
1)直流负荷功率随机扰动:系统仿真运行总时间为0~8 s,功率为20 kW 的直流负荷1 始终接入系统直流母线且稳定运行,4 s 时突然接入功率为20 kW 的直流负荷2(负荷扰动为100%),其功率随机波动服从均值为20 kW、标准差为2 的高斯分布,电压波形对比如附录B 图B3 所示。由图B3 可以看出,系统负荷功率扰动后,直流电压产生中频振荡(75.8 Hz)现象,加入镇定控制器后,系统电压中频振荡现象被有效抑制。
2)交流侧电感参数摄动:系统运行时间0~6 s,3 s 时因线路变化,交流侧等效电感参数由2 mH 变为4 mH,系统电压波形对比如附录B 图B4 所示。
3)滤波电容参数扰动:系统运行时间0~6 s,3 s 时直流侧等效滤波电容参数由4 000 μF 变为2 000 μF,系统电压波形对比如附录B 图B5 所示。
由附录B 图B4、图B5 可以看出,系统电路参数扰动后,加入镇定控制器能有效抑制直流电压振荡。
4.3 系统电压高频振荡现象
1)直流负荷功率随机扰动:系统仿真运行总时间为0~8 s,直流负荷1 始终接入系统直流母线且稳定运行,其负荷功率为20 kW。直流负荷2 在4 s 时突然接入,直流负荷2 功率扰动量为初始负荷的1.2 倍,并且直流负荷2 的功率随机波动服从高斯分布,负荷功率随机扰动强度(标准差)为4,加入镇定控制器前后的直流电压波形对比如附录B 图B6 所示。由图B6 可以看出,系统负荷功率扰动后,直流电压产生高频振荡(125 Hz)现象,系统电压高频振荡现象在加入镇定控制器后被有效抑制。
2)交流侧电感参数摄动:系统运行时间为0~6 s,在4 s 时交流侧等效电感参数由1.5 mH 变为3 mH,系统直流电压波形对比如附录B 图B7 所示。
3)滤波电容参数扰动:系统运行时间为0~6 s,在4 s 时电容参数由3 000 μF 变为2 000 μF,系统直流电压波形对比如附录B 图B8 所示。
由附录B 图B7、图B8 可以看出,系统电路参数发生扰动后,加入镇定控制器能抑制电压振荡现象。
4.4 多端(三端)直流配电系统仿真算例
多端(三端)直流配电系统结构如附录A 图A4所示,系统及控制参数如附录B 表B4 所示。
仿真场景如下:
1)直流负荷突变:多端直流配电系统稳定运行时直流负荷1 功率为20 kW,在3 s 时产生负荷突变,负荷扰动量为初始直流负荷的100%,控制器在3~4 s 对电压振荡现象有明显的抑制效果,直流电压波形对比如附录B 图B9 所示。
2)第三端换流器突然接入:0~2 s 时两端换流器正常运行,2 s 时接入第三端换流器,系统接入后出现电压振荡现象,加入控制器后,电压振荡幅值得到减弱,电压恢复稳定速度得到提高,电压波形对比如附录B 图B10 所示。
5 实验验证
在RT Box 实验平台中对镇定控制器效果进行验证,搭建了单端直流配电系统模型,实验平台如附录B 图B11 所示,实验参数与理论分析及仿真参数一致。
直流配电系统开始时处于正常运行状态,直流负荷1 的功率为20 kW,运行过程中突然接入直流负荷2,实验场景如下:
1)接入直流负荷2 的功率扰动量为负荷1 的100%,对比加入控制器前后的电压波形如附录B 图B12、图B13 所示。
2)接入的直流负荷2 的功率扰动量为负荷1 的1.2 倍,对比加入控制器前后的电压波形如附录B 图B14、图B15 所示。
3)接入直流负荷2 的功率扰动量为负荷1 的1.2 倍,对比加入控制器前后的电压波形如附录B 图B16、图B17 所示。
由实验结果可以看出,直流配电系统负荷扰动后,在不同实验场景下分别产生电压低、中和高频振荡现象,加入镇定控制器抑制了电压宽频振荡,验证了镇定控制器的控制效果。
通过仿真及实验验证结果分析得到如下结论:直流配电系统存在负荷功率随机扰动、电路参数摄动及多端直流配电系统复杂运行工况等随机因素,由于系统呈现低惯性弱阻尼特性以及电路参数与控制参数选取不匹配等因素,随机扰动后直流电压会产生不同频率的振荡。推导的镇定控制器能抑制系统电压宽频段振荡现象,提高系统鲁棒性及控制性能,从而验证了所提控制方法的有效性。
6 结语
本文建立了下垂控制方法下的直流配电系统随机扰动模型,提出了基于Hamilton 系统理论的随机镇定控制方法,提升系统在随机扰动下的鲁棒性与动态特性,抑制系统电压宽频段振荡,维持直流母线电压稳定,并得出如下结论:
1)直流配电系统交流线路电感、滤波电容参数摄动及直流负荷突变会导致系统电压产生振荡现象,不同系统参数会引发电压产生不同频率的振荡现象,甚至导致系统失稳;
2)基于Hamilton 系统理论设计预反馈控制律,推导出宽频振荡镇定控制器,通过对不同系统参数下的幅相特性曲线和阶跃响应曲线对比,所提方法显著提高了系统控制性能与稳定性;
3)仿真和实验结果表明直流配电系统加入镇定控制器后,能够实现宽频段电压振荡抑制效果,维持电压稳定。
本文提出了直流配电系统抑制宽频振荡的控制方法,后续须进一步对交直流混联系统电压宽频振荡问题进行控制研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
